
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Описание лабораторной установки. Методика проведения экспериментаСодержание книги
Поиск на нашем сайте
Методика проведения эксперимента Обработка экспериментальных данных Содержание отчёта 9. Контрольные вопросы ЛАБОРАТОРНАЯ РАБОТА № 4 МОНТАЖ АППАРАТОВ ТЕЛЕСКОПИЧЕСКОЙ СТОЙКОЙ Введение Устройство для монтажа вертикальных аппаратов позволяет монтировать аппараты в стеснённых условиях действующих предприятий, сократить стоимость и продолжительность монтажных работ, исключить применение тормозных оттяжек, уменьшить монтажные площади.
Цель работы Определение усилия в такелажной оснастке при различных углах подъёма колонны с помощью телескопической стойки.
Содержание работы Ознакомление с методами монтажа вертикальных тяжеловесных аппаратов поворотом вокруг шарнира. Изучение метода монтажа вертикальных аппаратов с использованием телескопической стойки. Определение усилий подъёма в тяговом полиспасте.
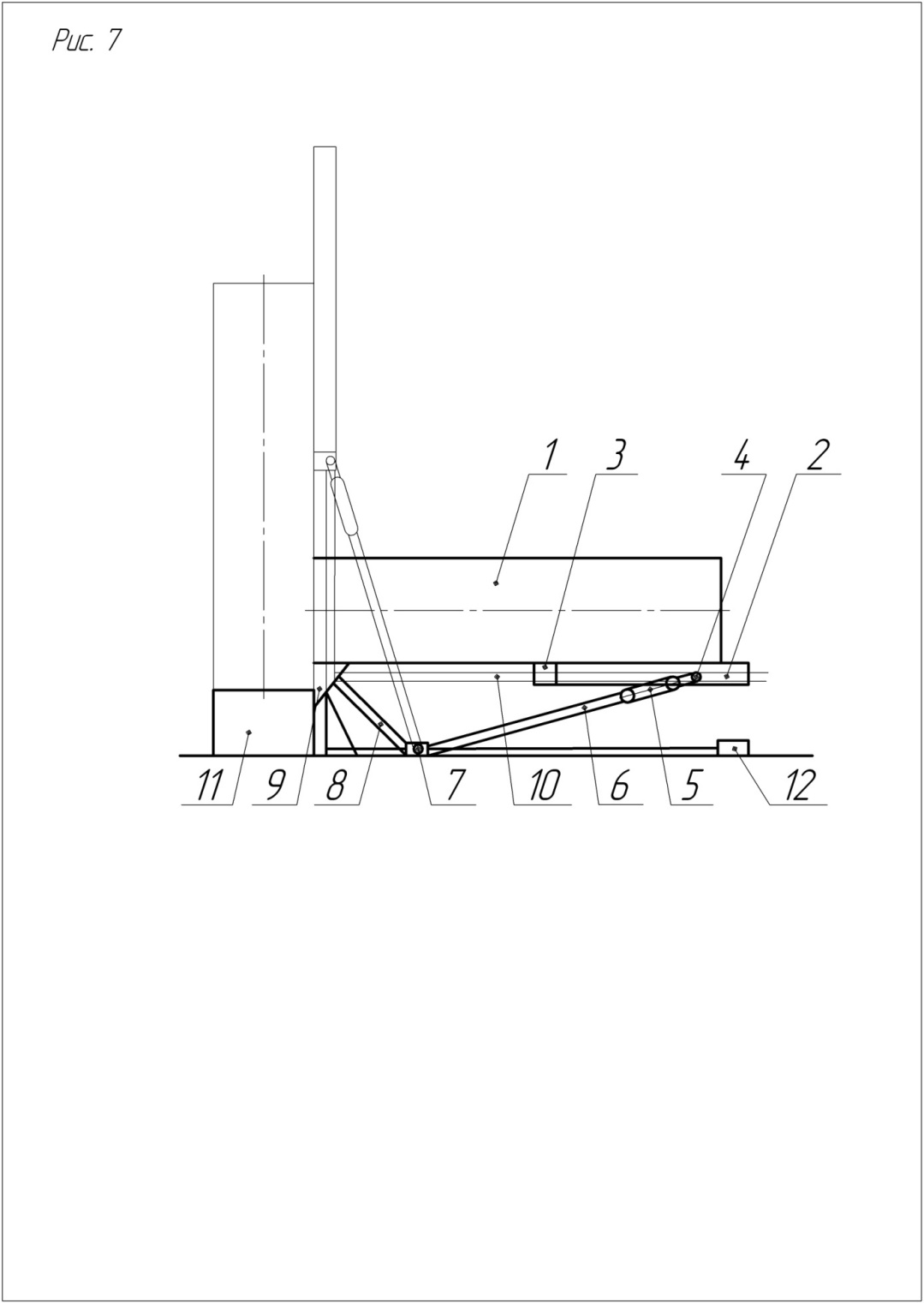
Теоретическая часть Схема устройства приведена на рисунке 1. На вертикальной конструкции 1 прикреплён монорельс 2 с жёстким упором 3, служащим для ограничения хода роликовой тележки 4. Роликовая тележка 4, взаимодействующая с монорельсом, соединена с телескопическим цилиндром 5, который жестко закреплен на верхнем конце подъёмной стойки 6 для удлинения звена («подъёмная стойка + телескопический цилиндр»). Нижний конец подъёмной стойки 6 закреплен в шарнирной пяте 7, установленной на фундаменте. Шарнирная пята 7 подъёмной стойки 6 соединена распором 8 с опорным шарниром 9 конструкции 1. Опорный шарнир 9 связан тяговым полиспастом 10 с подъёмной стойкой в месте крепления роликовой тележки 4.
Рисунок 1 – Схема устройства монтажа аппарата с помощью телескопической стойки
Устройство осуществляет подъём аппарата следующим образом. При включении лебёдки 12 за счёт сокращения расстояния между блоками тягового полиспаста 10, подъёмная стойка 6, снабжённая телескопическим цилиндром 5 и роликовой тележкой 4, поворачивается вокруг шарнирной пяты 7. Благодаря передаваемому усилию через роликовую тележку 4 на монорельс 2 поднимаемая конструкция 1 поворачивается вокруг опорного шарнира 9. По мере подъёма конструкции роликовая тележка 4 перемещается по монорельсу 2 к жёсткому упору 3. До достижения нейтрального положения, при котором направление силы тяжести проходит через ось опорного шарнира 9, поднимаемая конструкция 1 опирается с одной стороны на опорный шарнир 9, с другой – через монорельс 2 на роликовую тележку 4. При достижении конструкции нейтрального положения ролик 4 доходит до жёсткого упора 3. Дальнейшая установка конструкции 1 на фундамент 11 из нейтрального положения производится включением в работу телескопического цилиндра 5, за счёт которого удлиняется звено «подъёмная стойка + телескопический цилиндр» при постоянном натяжении тягового полиспаста 10. Роликовая тележка 4 в это время взаимодействует с жёстким упором 3 и внутренней стороной опорной поверхности монорельса 2, что исключает резкое опрокидывание конструкции на фундамент. При постепенном удлинении звена «подъёмная стойка + телескопический цилиндр» конструкция плавно доводится до проектного положения.
Расчётная схема устройства представлена на рисунке 2. Для определения усилия в тяговых полиспастах составим сумму моментов сил относительно оси O 1:
тогда сила подъёма RB равна:
где Знание усилия R В (2) даёт возможность определить усилие в тяговом полиспасте. Составим сумму моментов сил относительно оси О2:
Используя уравнения (2-3) и принимая во внимание, что в уравнении (4) угол φ из геометрических соображений определяется из выражения:
то усилие в тяговом полиспасте определяется из выражения:
Рисунок 2 – Расчётная схема усилий в устройстве для монтажа с помощью Телескопической стойки На первом этапе подъёма аппарата усилие в штанге будет сжимающим (до положения неустойчивого равновесия). На втором этапе подъёма аппарата усилие в штанге будет растягивающим (при достижении неустойчивого равновесия и далее). Для определения усилия в штанге (первый этап) рассмотрим равновесие системы, изображенной на схеме рисунке 3.
Рисунок 3 – Расчётная схема усилия в штанге SB 1 при монтаже аппарата с помощью телескопической стойки (первый этап)
При равновесии системы с учётом веса штанги плечо силы Gω определится следующим образом:
Плечо силы SB определится из треугольника
Составив сумму моментов сил относительно оси О1:
Усилие, сжимающее штангу на первом этапе подъёма, с учётом зависимостей (7-8) из уравнения (9) равно:
При расчёте усилия SB 1 необходимо помнить о зависимости угла наклона штанги φ от угла α. Усилие SB 1 может быть рассчитано также при известных значениях усилий Sn и RB и их равнодействующей:
После того как колонна перешла через угол неустойчивого равновесия, подъёмная штанга работает на растяжение. Для определения усилия растяжения штанги на втором этапе подъёма составим сумму моментов сил относительно оси O 1:
где
Принимая во внимание формулу (14), выражение для определения усилия растяжения штанги на втором этапе подъёма (13) примет вид:
Максимальное растягивающее усилие возникает при угле α ≈ 90º и определяется из выражения:
Проверка на прочность конструкции при её монтаже проводится на основании определения усилий, действующих на неё в процессе монтажа. При монтаже данным устройством по величине усилия RB проверяется на прочность толщина стенки обечайки поднимаемого аппарата, а усилие, возникающее в поворотном шарнире, обусловливает условия прочности нижней части колонны. Усилие RB определяется при рассмотрении усилий, возникающих в грузовом полиспасте. Для определения усилий, возникающих в поворотном шарнире, составим уравнения равновесия системы, схема которой представлена на рисунке 3:
Горизонтальная составляющая реакции в шарнире может быть найдена из уравнения равновесия вдоль оси ОХ:
Тогда реакция в шарнире может быть определена как:
Таким образом, по известным усилиям RB и R можно проверить на прочность узлы поднимаемой колонны. При известной внешней нагрузке SB в момент установки аппарата на фундамент (растяжение штанги) и рабочего давления в гидросистеме можно определить диаметр гидроцилиндра из уравнения:
где D – диаметр гидроцилиндра; d – диаметр штока; Р – давление в гидросистеме; ηµ – механический к.п.д., учитывающий потери на трение между поршнем и штоком. Из зависимости (22) определяется диаметр гидроцилиндра:
Производительность насосной станции при заданной скорости движения поршня определяется из выражения:
где V – скорость движения поршня. Если известна производительность насосной станции, то может бытьопределена скорость поршня и, как следствие, скорость установки конструкции на фундамент. Мощность привода насосной станции при известной её производительности определится из выражения:
Проверка напряжений в стенке гидроцилиндра по методу расчёта для толстостенных сосудов определится из выражения:
где R и r – наружный и внутренний радиусы гидроцилиндра;
|
|||||||
|
|
Последнее изменение этой страницы: 2021-04-20; просмотров: 122; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.225.92.23 (0.009 с.) |

 , (1)
, (1) , (2)
, (2) . (3)
. (3) . (4)
. (4) , (5)
, (5) (6)
(6)
 . (7)
. (7) :
: . (8)
. (8) . (9)
. (9) . (10)
. (10) . (11)
. (11) ; (12)
; (12) , (13)
, (13) – расстояние от точки закрепления оголовка штанги до оси поворотного шарнира; φн, αн – углы вположении неустойчивого равновесия, соответственно, штанги и колонны; φ1 – угол наклона штанги при её меняющейся длине, который равен:
– расстояние от точки закрепления оголовка штанги до оси поворотного шарнира; φн, αн – углы вположении неустойчивого равновесия, соответственно, штанги и колонны; φ1 – угол наклона штанги при её меняющейся длине, который равен: . (14)
. (14) . (15)
. (15) . (16)
. (16) ; (17)
; (17) . (18)
. (18) ; (19)
; (19) . (20)
. (20) . (21)
. (21) , (22)
, (22) . (23)
. (23) , (24)
, (24) . (25)
. (25) , (26)
, (26) – допускаемое напряжение на разрыв для стали.
– допускаемое напряжение на разрыв для стали.


