
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Описание работы и анализ качества действия управления существующей сау.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Рис.2. структурная схема САУ Весь процесс регулирования температуры можно описать следующей последовательностью действий: · Оценка рассогласования (ошибки регулирования), т.е. разности между заданным значением температуры и измеренным; · Вычисление величины воздействия на регулятор пропорциональное величине рассогласования; · Воздействие на регулятор; · Ожидание времени, равное транспортному запаздыванию; · Повторение цикла регулирования сначала. Регулирование температуры воды на выходе из котла в системе регулирования описывается ПИД – законом.
Интегральная часть – величина воздействия накапливается с учётом прошлых воздействий, т.е. учитывается история, так называемая интегральная сумма воздействий. И в зависимости от того, если предыдущее воздействие не привело к желаемому результату, то следующее воздействие будет больше предыдущего даже при том же значении ошибки рассогласования. Интегральные коэффициенты 0-4 определяют величину интегральной составляющей для получения усиления или ослабления предыдущих воздействий на регулирующий орган. Определяются эмпирическим путём. Дифференциальная часть – величина воздействия пропорциональна скорости изменения измеренного значения, т.е. она предназначена для гашения быстрых скачков температуры воды и практически не имеет влияния при медленном изменении температуры. Дифференциальные коэффициенты определяют скорость воздействия на регулирующий орган при различных величинах разбаланса.
3. Обоснование требований к разрабатываемой САУ.
Котлоагрегат представляет значительную опасность для обслуживающего персонала и всего производства в целом. Во избежание возникновения непредвиденных аварийных ситуаций, требования к надежности (безотказной работе) системы предъявляются самые высокие.
При выборе технических средств автоматизации учитываем следующие параметры:
1. Ручной и дистанционный режим 2. Отображение процесса регулирования температуры на операторской станции
3. Ввод задания с операторской станции 4. Точность регулирования (отклонения от заданного значения не должны превышать 3-5%).
Рис. 5. Структурная схема САУ. Управление температурой воды на выходе из котла ПТВМ-50, путем изменения подачи топлива.
Сигнал с операторской станции (ОС) поступает на программируемый логический контроллер (ПЛК), который обрабатывает входную величину и информацию с измерительного преобразователя и формирует управляющий сигнал, далее проходит блок ручного управления в котором можно выбрать режим работы (Автоматический или Ручной), далее проходит преобразователь и идёт на исполнительный механизм (ИМ) который управляет задвижкой, а она в свою очередь оказывает влияние на объект управления (ОУ) которым является водогрейный котел (ВК).
Выбор ПЛК По задании преподавателя был использован микроконтроллер “Ремиконт”- Р-130(Рис 5.2) Назначение: Рис. 5.2 Ремикон Р-130 Контроллер микропроцессорный Ремиконт Р-130 предназначен для построения современных автоматизированных систем управления технологическими процессами (АСУ ТП) и позволяет выполнять оперативное управление с использованием персональных ЭВМ, автоматическое регулирование, автоматическое логикопрограммное управление, автоматическое управление с переменной структурой, защиту и блокировку, сигнализацию, регистрацию событий. Технологическое программирование контроллера микропроцессорного Ремиконт Р-130 выполняется без программистов специалистами, знакомыми с традиционными средствами контроля и управления в АСУ ТП. Запрограммированная информация сохраняется при отключении питания с помощью встроееной батареи.
По интерфейсному входу-выходу контроллеры микропроцессорные Ремиконт Р-130 могут объединяться в локальную управляющую сеть «Транзит» кольцевой конфигурации, которая с помощью блока «Шлюз БШ-1» может взаимодействовать с любым внешним абонентом (например, ЭВМ). Входные – выходные сигналы. В процессе сбора и обработки информации от датчиков пользователь может выполнять необходимую коррекцию входных сигналов, их линеаризацию, фильтрацию, а также любую арифметическую операцию, в том числе извлечение квадратного корня. В контроллер устанавливаются 2 любых сменных модуля входа – выхода УСО (устройства связи с объектом).
Входные сигналы - сигналы от термопар ТХК, ТХА, ТПР, ТВР, ТПП; - сигналы от термометров сопротивлений ТСМ, ТСП; - унифицированные аналоговые сигналы постоянного тока 0-5, 0-20, 4-20 мА; 0-10В; дискретные сигналы: -логическая «1» напряжением от 19 до 32В; -логический «0» напряжением от 0 до 7В. Выходные сигналы -
- дискретные сигналы: - транзитного выхода – максимальное напряжение коммутации 40В, максимальный ток нагрузки 0,3А - сильноточного релейного выхода – максимальное напряжение
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 505; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.189.182.195 (0.007 с.) |


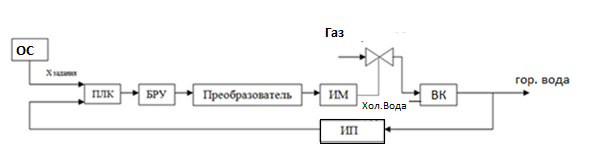
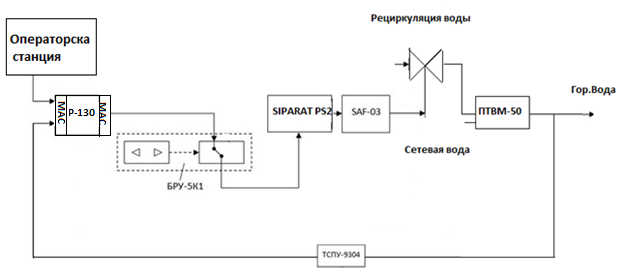
 Рис. 5.1. Структурная схема САУ
Рис. 5.1. Структурная схема САУ


