Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Схема автоматического и совмещенного управления ЛАСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Назначение САУ-ЛА и АП Целью данного курса является ознакомление с наиболее общими принципами определения конструктивных параметров элементов и агрегатов автоматических устройств, применяемых для управления летательными аппаратами, в первую очередь - автопилота. Переходя к предмету курса, следует в первую очередь отметить, что основным назначением САУ-ЛА является автоматическое управление полетом ЛА. При этом под автоматическими устройствами подразумеваются разнообразные САУ ЛА (САУ ЛА – система автоматического управления летательного аппарата), обеспечивающие в том или ином объеме автоматизацию управления полетом.
Многообразие классов ЛА (ЛА – летательный аппарат) и еще большее многообразие функций САУ ЛА, приводит к необходимости дифференцированного подхода к вопросам расчета и проектирования в каждом конкретном случае. Естественно, что в рамках одного курса полностью охватить все многообразие конструкций невозможно, поэтому многие типовые элементы (усилители и другие электронные устройства) рассматриваться не будут. Основное внимание при изучении курса будет уделено влиянию конструктивных параметров элементов АП на динамические характеристики системы ЛА-САУ. Они начали появляться одновременно с появлением первых управляемых ЛА – самолетов. В развитии САУ управления полетом могут быть отмечены три этапа: 1. Использование регуляторов прямого (или непосредственного) действия – в настоящее время представляют в основном исторический интерес (пример - газовый редуктор-регулятор давления, флюгерный и маятниковый АП, см. Приложение).
2. Использование регуляторов непрямого действия (автопилот Циолковского для дирижабля, 1898 год, и до 1940 г.), в основном одноканальных, в которых чувствительный элемент воздействует на регулирующий орган объекта регулирования не непосредственно, а через усилительно-преобразовательное устройство. Необходимые для перемещения регулирующего органа усилие и мощность, пропорциональные размеру управляющего воздействия, развиваются за счёт отдельного источника энергии. 3. Использование многоканальных и многофункциональных САУ. Схема автоматического и совмещенного управления ЛА Для автоматического управления необходимо построить замкнутый контур, рис. 1.
Объединение воздействий летчика и САУ на ЛА может осуществляться двумя способами: - непосредственное суммирование перемещения штурвальной колонки летчиком и сигнала от САУ специальным механическим агрегатом (электрически, летчик оперирует джойстиком и сигнал управления подается на сервопривод); - директорное (полуавтоматическое) управление, САУ формирует сигнал рассогласования относительно заданной траектории и этот сигнал подается на специальный командный прибор – индикатор, а летчик перемещает штурвальную колонку и полностью управляет рулями, стремясь удержать стрелку в центральном (нулевом) положении. Полностью автоматическое управление полетом осуществляется без вмешательства, но под контролем экипажа, а также на беспилотных ЛА.
Тема 1. САУ ЛА и АП в составе оборудования современного самолета Пилотажно-навигационный комплекс, функции, состав ПНК Автопилот ЛА, назначение и основные функции АП Агрегатная блок-схема АП Схема (принципы) формирования управляющих сигналов канала АП Важно представить, какое место занимает САУ ЛА и АП в составе оборудования современного самолета. Пилотажно-навигационный комплекс обеспечивает решение двух групп задач: (1) навигация и (2) управление ЛА (задача 1: где находимся, куда движемся, как проложить траекторию полета, задача 2: как управлять движением, куда перемещать органы управления). Агрегатная блок-схема АП Принципиально в составе любого АП можно выделить ряд основных агрегатов, выполняющих определенные функции, хотя не всегда имеющих законченное конструктивное оформление в едином блоке (необходимо рассматривать распределенную систему, например набор ДПИ, каждый из которых имеет законченную конструкцию или системы контроля, которые присутствуют в различных блоках, но информация от них поступает в центральный блок обработки). Ряд основных агрегатов представлен на схеме рис. 4. ПУ и РУ – пульт управления и рукоятки управления – устройства, посредством которых осуществляется оперативное управление АП и управление ЛА через АП (например, задатчик координированного разворота).
Рис. 4. Агрегатная блок-схема АП СВК – система встроенного контроля – совокупность специальных устройств, измеряющих параметры процесса управления и/или движения ЛА, производящих обработку этих замеров по определенному алгоритму с целью получения показателей правильности процесса управления ЛА посредством АП (пример: ограничение αкрит). ДПИ – система датчиков первичной информации (V, H, углы, угловые скорости, перегрузка и др.). БС – блок связи – агрегат, согласующий выходные характеристики взаимодействующих с АП систем и ДПИ с входными характеристиками АП. (блок согласования, обнуляет рассогласование сигнала конкретного датчика и заданного параметра стабилизации (например, по тангажу для горизонтального полета), что предотвращает возникновение скачкообразных управляющих сигналов на входе вычислительного устройства САУ и исключает рывки рулевого агрегата). ВУ – вычислительное устройство или блок формирования управляющих сигналов, агрегат, осуществляющий логическо-вычислительные операции и операционно-функциональные преобразования с сигналами ДПИ и вырабатывающий управляющие сигналы в АП в соответствии с реализованным в нем законом управления. СП – сервопривод АП, исполнительный механизм – силовая следящая система, предназначенная для перемещения органа управления ЛА, или устройство, непосредственно вырабатывающее управляющее усилие (или момент), приложенное к ЛА. И – индикаторы, сигнальные, измерительные и командные приборы, обеспечивающие передачу качественной и количественной информации об условиях полета ЛА и техническом состоянии АП (приборы и указатели, отображающие параметры полета по сигналам ДПИ, параметры настройки и состояния вычислителя САУ, величины перемещения органов управления и иную необходимую информацию).
Системы координат
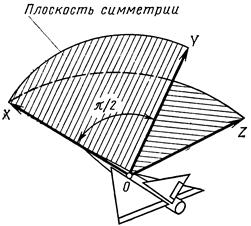
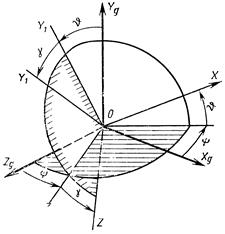
Рассмотрим плоское движение летательного аппарата, при котором вектор скорости центра масс совпадает с плоскостью симметрии. Самолет в скоростной системе координат представлен на рис.2.2.
Рис.9. Самолет в скоростной системе координат
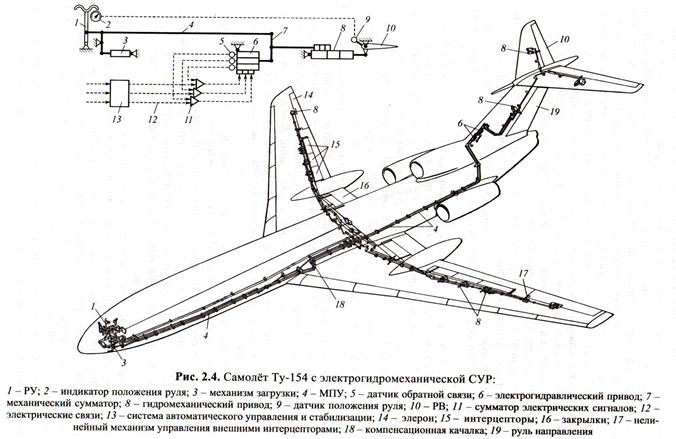
Примеры реализации Вероятно, первым самолётом с подобной автоматикой стал М-50 ОКБ-23 Мясищева. АБСУ-50, установленная на этом самолёте, также имела систему искусственной центровки (автомат перекачки топлива). Например, система гражданского самолета - АБСУ-134 состоит из автопилота АП-134, автомата тяги АТ-5, системы траекторного управления СТУ-134 и аппаратуры ухода на второй круг. АБСУ устанавливалось на самолеты ТУ-154 и ТУ-144 (АБСУ-154) и ИЛ-62 (САУ-1Т) В составе бортового оборудования самолёта Ту-154 система АБСУ-154-2 является составной частью ПНК самолёта и выполняет функции, перечисленные ниже в табл. 1. При разработке необходимо учесть, что система управления для каждого самолета практически уникальна, поскольку ЛА различаются: - по назначению и ТТХ - по компоновке и техническим идеям - использованием различных типов механизмов в зависимости от массы, скорости, назначения - применением новых материалов, конструктивных элементов и приборов. В качестве примера можно привести перечень функций, выполняемых системой управления Ту-154 (аналогичные по функционалу системы разработаны для аэробуса ИЛ-86 и пассажирского самолета ИЛ-62 и других. На рис. 2.4 вверху слева показана структура системы управления рулем высоты, включающая механическую систему ручного управления (элементы 1-7) и систему автоматического управления (элементы 11-13).
При необратимой системе гидроусилитель воспринимает усилия, создаваемые шарнирным моментом аэродинамических сил, действующих на орган управления. Так как моменты от аэродинамических сил не передаются на колонку, штурвал и педали, то для имитации этих моментов в систему управления введены загрузочные устройства, создающие усилия при отклонении колонки, штурвала и педалей.
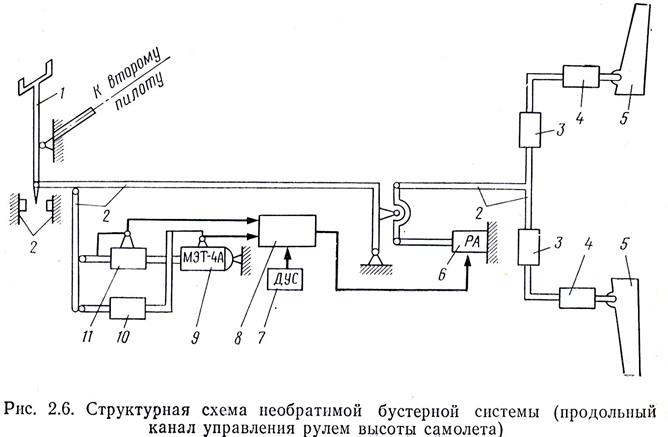
Гидроусилитель (бустер) отклоняет соответствующий орган управления со скоростью до 50°/с с чрезвычайно малым запаздыванием. Требуется приложение небольших усилий со стороны пилота для перемещения золотника гидроагрегата, при этом реакция органа управления не передается на рычаги управления. Усилия «в сторону пилота» гасятся инерционностью проводки, ее трением и механизмом, имитирующим нагрузку от шарнирного момента. Механическая часть канала управления рулем высоты показана на рис. 2.6. Схема управления рулем высоты 5 обеспечивает управление по тангажу на всех режимах полета как от пилота, так и от бортовой системы управления (рис. 2.6). При управлении от пилота перемещение колонки 1 через тягу 2 управления передается на золотник рулевого привода 4. Усилия на колонке управления создаются загружателями 10 и 11. Для снятия созданного ими усилия используется электромеханизм триммерного эффекта 9, уменьшающий обжатие пружины. Сформированные сигналы от датчика угловой скорости 7 электромеханизма 9 и пилота поступают на вычислитель и усилитель 8 сервопривода электрогидравлического рулевого агрегата 6, где происходит их обработка. Электрический сигнал преобразуется в механическое перемещение проводки управления.
1 – штурвальная колонка 2 – тяги проводки управления 3 – золотниковый механизм бустера 4 – бустер – гидроусилитель, раздельные для левой и правой секций руля высоты 5 – руль высоты, секции на левой и правой консолях стабилизатора 6 – рулевой агрегат, сервопривод 7 – ДУС, датчик угловой скорости тангажа (демпфер тангажа) 8 – усилитель сервопривода 9 – механизм триммера руля высоты 10, 11 – механизмы загрузки штурвальной колонки
Автоматизированная бортовая система управления самолетом Ту-154 – АБСУ-154 Электромеханический комплекс системы управления самолетом Ту-154Б включает в себя системы продольного и поперечного управления, автоматическую бортовую систему управления рулем направления, системы управления воздушными тормозами — интерцепторами, закрылками и предкрылками. Система бортового управления обеспечивает штурвальное и автоматическое управление во всем диапазоне режимов полета — от взлета допосадки. Конструкция проводки управления и рулевых механизмов и приводов реализует (см. рис. 2.4 и 2.6): – ручное (штурвальное) управление с улучшением показателей управляемости; – автоматическую стабилизацию заданных режимов полета; – автоматическое траекторное управление.
В таблице представлены обобщенные описания функционала комплексных систем, по каждой строке можно сформулировать конкретные требования и детализировать решаемые задачи. Например, для выполнения требований строки 1 необходимо рассмотреть три канала управления (тангаж, крен, рысканье) и соответственно разработать три подсистемы управления, со своим набором конкретных функций. Количество функций в системах управления самолетов (приближенно, данные ЦАГИ): Ан-148 – 12, Ил-96 – 15, Ту-204 – 25, Sukhoi Superjet 100 – 32. Приблизительно столько же функций (около 30) реализовано в Boeing-787 и Airbus-380.
Литература 1. Основные геометрические и аэродинамические характеристики самолетов и ракет: Справочник / В. Г. Микеладзе, В. М. Титов, 143 с. ил. 21 см, 2-е изд., перераб. и доп. М. Машиностроение 1990 2. Михалев И.А. и др. Системы автоматического управления самолетом. "Машиностроение", Москва 1971, стр. 464. 3. Михалев И.А., Окоемов Б.Н., Павлина И.Г., Чикулаев М.С., Киселев Ю.Ф. Системы автоматического и директорного управления самолетом. М., Машиностроение, 1974, 232 с. 4. Михалев И.А., Окоемов Б.Н., Чикулаев М.С.Системы автоматического управления самолетом. М: Машиностроение, 1987 год, 240 стр. 5. Шумилов И.С. Системы управления рулями самолетов. 2009. 469 с. ISBN 978-5-7038-3085-7 6. Лигум Т.И., Скрипниченко С.Ю., Шишмарев А.В. Аэродинамика самолета Ту-154Б. – М.: Транспорт, 1985. 263 с. 7. Системы управления летательных аппаратов. Под ред. Воробьева В.В. М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 2008, -203 с. ПРИЛОЖЕНИЕ П.1. Автопилот Циолковского Первую в мире схему автоматического управления дирижаблем разработал наш соотечественник, знаменитый ученый К. Э. Циолковский в 1898 г.
На дирижабле нужно иметь источник электрического тока, электромотор, для отклонения руля высоты и чувствительный элемент в виде маятника с переключателями цепи электрического тока (рис. 31). В случае «ухода» дирижабля из горизонтального полета маятник отклоняется. Переключатель соединяет соответствующие контакты. От источников питания ток проходит в электромотор, приводя его в движение; электромотор через зубчатую передачу перемещает руль высоты в положение, при котором дирижабль возвращается в горизонтальное положение (рис. 31). Конструкции подобных автопилотов относятся к группе маятниковых.
Румпельный автопилот яхты (флюгерный, прямого действия) П.2. Аэродинамическое качество некоторых летательных аппаратов и птиц (ru.wikipedia.org›Аэродинамическое качество)
Механизация крыла
Предкрылок
Интерцептор
Схема обтекания
Boeing-747 с выпущенными закрылками и предкрылками
Назначение САУ-ЛА и АП Целью данного курса является ознакомление с наиболее общими принципами определения конструктивных параметров элементов и агрегатов автоматических устройств, применяемых для управления летательными аппаратами, в первую очередь - автопилота. Переходя к предмету курса, следует в первую очередь отметить, что основным назначением САУ-ЛА является автоматическое управление полетом ЛА. При этом под автоматическими устройствами подразумеваются разнообразные САУ ЛА (САУ ЛА – система автоматического управления летательного аппарата), обеспечивающие в том или ином объеме автоматизацию управления полетом.
Многообразие классов ЛА (ЛА – летательный аппарат) и еще большее многообразие функций САУ ЛА, приводит к необходимости дифференцированного подхода к вопросам расчета и проектирования в каждом конкретном случае. Естественно, что в рамках одного курса полностью охватить все многообразие конструкций невозможно, поэтому многие типовые элементы (усилители и другие электронные устройства) рассматриваться не будут. Основное внимание при изучении курса будет уделено влиянию конструктивных параметров элементов АП на динамические характеристики системы ЛА-САУ. Они начали появляться одновременно с появлением первых управляемых ЛА – самолетов. В развитии САУ управления полетом могут быть отмечены три этапа: 1. Использование регуляторов прямого (или непосредственного) действия – в настоящее время представляют в основном исторический интерес (пример - газовый редуктор-регулятор давления, флюгерный и маятниковый АП, см. Приложение).
2. Использование регуляторов непрямого действия (автопилот Циолковского для дирижабля, 1898 год, и до 1940 г.), в основном одноканальных, в которых чувствительный элемент воздействует на регулирующий орган объекта регулирования не непосредственно, а через усилительно-преобразовательное устройство. Необходимые для перемещения регулирующего органа усилие и мощность, пропорциональные размеру управляющего воздействия, развиваются за счёт отдельного источника энергии. 3. Использование многоканальных и многофункциональных САУ. Схема автоматического и совмещенного управления ЛА Для автоматического управления необходимо построить замкнутый контур, рис. 1.
Объединение воздействий летчика и САУ на ЛА может осуществляться двумя способами: - непосредственное суммирование перемещения штурвальной колонки летчиком и сигнала от САУ специальным механическим агрегатом (электрически, летчик оперирует джойстиком и сигнал управления подается на сервопривод); - директорное (полуавтоматическое) управление, САУ формирует сигнал рассогласования относительно заданной траектории и этот сигнал подается на специальный командный прибор – индикатор, а летчик перемещает штурвальную колонку и полностью управляет рулями, стремясь удержать стрелку в центральном (нулевом) положении. Полностью автоматическое управление полетом осуществляется без вмешательства, но под контролем экипажа, а также на беспилотных ЛА.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 1738; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.151 (0.013 с.) |

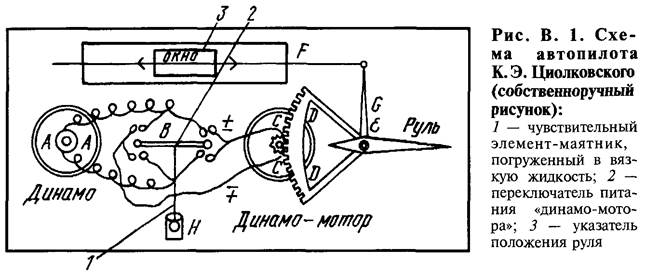
 Принципиальная схема автоматического управления, разработанная К. Э. Циолковским, состоит из всех основных элементов, которые имеются в современных автопилотах «непрямого» действия. В таких автопилотах чувствительный элемент воздействует на управление не непосредственно, а через специальную машину, приводящую в движение орган управления дирижаблем или самолетом.
Принципиальная схема автоматического управления, разработанная К. Э. Циолковским, состоит из всех основных элементов, которые имеются в современных автопилотах «непрямого» действия. В таких автопилотах чувствительный элемент воздействует на управление не непосредственно, а через специальную машину, приводящую в движение орган управления дирижаблем или самолетом.