Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Тема 3. Задачи управления, решаемые сау (абсу) современного самолетаСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Функции САУ ЛА, классификация бортовых систем автоматического управления Примеры реализации Анализируя историю разработки и развития бортовых систем ЛА, можно проследить развитие и совершенствами систем, что обусловлено повышением летно-тактических и конструкционных качеств ЛА, а также ростом технических возможностей для создания элементов и агрегатов бортового оборудования. Функции САУ ЛА, классификация бортовых систем автоматического управления На первых порах назначение АП в основном соответствует функциям летчика Автопилот – это система автоматического управления летательного аппарата (ЛА), предназначенная для перемещения органов управления ЛА с целью обеспечения требуемых значений параметров полета. При этом считаем, что самолет устойчив и имеет приемлемые характеристики управляемости. Автопилот представляет собой трехканальную систему, осуществляющую автоматическое управление самолетом относительно трех осей. (Л.4 – классификация АП) Системы обеспечения устойчивости и требуемых характеристик управляемости (для ручного пилотирования) - АПУ, АБУ, это системы автоматизации управления полетом, необходимые для ручного пилотирования неустойчивого самолета. Автоматическая Бортовая Система Управления (АБСУ = САУ) – комплексная многофункциональная система, обеспечивает автоматизацию управления на всех режимах полета. Является составной частью ПНК самолёта.
До разработки таких комплексных систем включение автопилота производилось лишь по желанию летчика, в основном для установившегося режима полета или совершения простых маневров – разворот с заданным креном, доворот по курсу и др. На ЛА снабженном АБСУ полное отключение автопилота может производиться лишь в случае крайней необходимости. Отключение автопилота осуществляется автоматически лишь при возникновении таких отказов в системе, при которых полет с включенной АБСУ становится невозможным. АБСУ является многофункциональной и многорежимной системой и предназначена для повышения эффективности эксплуатации самолёта, АБСУ обеспечивает: - повышение комфорта работы экипажа, снижение утомляемости - требуемые характеристики устойчивости и управляемости во всём диапазоне эксплуатационных режимов полёта, - повышение безопасности полёта, ограничение предельных режимов полёта, «приведение к горизонту» - реализацию автоматических режимов полёта, стабилизацию траектории, высоты, скорости, заход на посадку, уход на второй круг и т.д. - индикацию пилотажно-навигационных параметров, формирование команд-предписаний для действий лётчика, (директорное управление, предупреждение критического режима) - контроль исправности систем и индикацию показателей технического состояния.
Рис. 11. Схема АБСУ
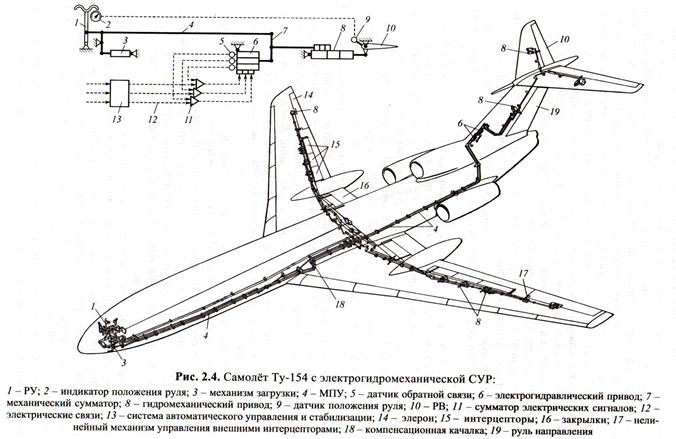
Примеры реализации Вероятно, первым самолётом с подобной автоматикой стал М-50 ОКБ-23 Мясищева. АБСУ-50, установленная на этом самолёте, также имела систему искусственной центровки (автомат перекачки топлива). Например, система гражданского самолета - АБСУ-134 состоит из автопилота АП-134, автомата тяги АТ-5, системы траекторного управления СТУ-134 и аппаратуры ухода на второй круг. АБСУ устанавливалось на самолеты ТУ-154 и ТУ-144 (АБСУ-154) и ИЛ-62 (САУ-1Т) В составе бортового оборудования самолёта Ту-154 система АБСУ-154-2 является составной частью ПНК самолёта и выполняет функции, перечисленные ниже в табл. 1. При разработке необходимо учесть, что система управления для каждого самолета практически уникальна, поскольку ЛА различаются: - по назначению и ТТХ - по компоновке и техническим идеям - использованием различных типов механизмов в зависимости от массы, скорости, назначения - применением новых материалов, конструктивных элементов и приборов. В качестве примера можно привести перечень функций, выполняемых системой управления Ту-154 (аналогичные по функционалу системы разработаны для аэробуса ИЛ-86 и пассажирского самолета ИЛ-62 и других. На рис. 2.4 вверху слева показана структура системы управления рулем высоты, включающая механическую систему ручного управления (элементы 1-7) и систему автоматического управления (элементы 11-13).
При необратимой системе гидроусилитель воспринимает усилия, создаваемые шарнирным моментом аэродинамических сил, действующих на орган управления. Так как моменты от аэродинамических сил не передаются на колонку, штурвал и педали, то для имитации этих моментов в систему управления введены загрузочные устройства, создающие усилия при отклонении колонки, штурвала и педалей.
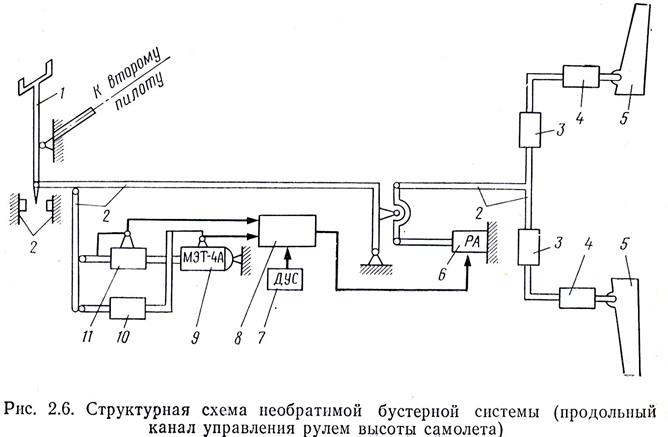
Гидроусилитель (бустер) отклоняет соответствующий орган управления со скоростью до 50°/с с чрезвычайно малым запаздыванием. Требуется приложение небольших усилий со стороны пилота для перемещения золотника гидроагрегата, при этом реакция органа управления не передается на рычаги управления. Усилия «в сторону пилота» гасятся инерционностью проводки, ее трением и механизмом, имитирующим нагрузку от шарнирного момента. Механическая часть канала управления рулем высоты показана на рис. 2.6. Схема управления рулем высоты 5 обеспечивает управление по тангажу на всех режимах полета как от пилота, так и от бортовой системы управления (рис. 2.6). При управлении от пилота перемещение колонки 1 через тягу 2 управления передается на золотник рулевого привода 4. Усилия на колонке управления создаются загружателями 10 и 11. Для снятия созданного ими усилия используется электромеханизм триммерного эффекта 9, уменьшающий обжатие пружины. Сформированные сигналы от датчика угловой скорости 7 электромеханизма 9 и пилота поступают на вычислитель и усилитель 8 сервопривода электрогидравлического рулевого агрегата 6, где происходит их обработка. Электрический сигнал преобразуется в механическое перемещение проводки управления.
1 – штурвальная колонка 2 – тяги проводки управления 3 – золотниковый механизм бустера 4 – бустер – гидроусилитель, раздельные для левой и правой секций руля высоты 5 – руль высоты, секции на левой и правой консолях стабилизатора 6 – рулевой агрегат, сервопривод 7 – ДУС, датчик угловой скорости тангажа (демпфер тангажа) 8 – усилитель сервопривода 9 – механизм триммера руля высоты 10, 11 – механизмы загрузки штурвальной колонки
Автоматизированная бортовая система управления самолетом Ту-154 – АБСУ-154 Электромеханический комплекс системы управления самолетом Ту-154Б включает в себя системы продольного и поперечного управления, автоматическую бортовую систему управления рулем направления, системы управления воздушными тормозами — интерцепторами, закрылками и предкрылками. Система бортового управления обеспечивает штурвальное и автоматическое управление во всем диапазоне режимов полета — от взлета допосадки. Конструкция проводки управления и рулевых механизмов и приводов реализует (см. рис. 2.4 и 2.6): – ручное (штурвальное) управление с улучшением показателей управляемости; – автоматическую стабилизацию заданных режимов полета; – автоматическое траекторное управление.
В таблице представлены обобщенные описания функционала комплексных систем, по каждой строке можно сформулировать конкретные требования и детализировать решаемые задачи. Например, для выполнения требований строки 1 необходимо рассмотреть три канала управления (тангаж, крен, рысканье) и соответственно разработать три подсистемы управления, со своим набором конкретных функций. Количество функций в системах управления самолетов (приближенно, данные ЦАГИ): Ан-148 – 12, Ил-96 – 15, Ту-204 – 25, Sukhoi Superjet 100 – 32. Приблизительно столько же функций (около 30) реализовано в Boeing-787 и Airbus-380.
Литература 1. Основные геометрические и аэродинамические характеристики самолетов и ракет: Справочник / В. Г. Микеладзе, В. М. Титов, 143 с. ил. 21 см, 2-е изд., перераб. и доп. М. Машиностроение 1990 2. Михалев И.А. и др. Системы автоматического управления самолетом. "Машиностроение", Москва 1971, стр. 464. 3. Михалев И.А., Окоемов Б.Н., Павлина И.Г., Чикулаев М.С., Киселев Ю.Ф. Системы автоматического и директорного управления самолетом. М., Машиностроение, 1974, 232 с. 4. Михалев И.А., Окоемов Б.Н., Чикулаев М.С.Системы автоматического управления самолетом. М: Машиностроение, 1987 год, 240 стр. 5. Шумилов И.С. Системы управления рулями самолетов. 2009. 469 с. ISBN 978-5-7038-3085-7 6. Лигум Т.И., Скрипниченко С.Ю., Шишмарев А.В. Аэродинамика самолета Ту-154Б. – М.: Транспорт, 1985. 263 с. 7. Системы управления летательных аппаратов. Под ред. Воробьева В.В. М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 2008, -203 с. ПРИЛОЖЕНИЕ П.1. Автопилот Циолковского Первую в мире схему автоматического управления дирижаблем разработал наш соотечественник, знаменитый ученый К. Э. Циолковский в 1898 г.
На дирижабле нужно иметь источник электрического тока, электромотор, для отклонения руля высоты и чувствительный элемент в виде маятника с переключателями цепи электрического тока (рис. 31). В случае «ухода» дирижабля из горизонтального полета маятник отклоняется. Переключатель соединяет соответствующие контакты. От источников питания ток проходит в электромотор, приводя его в движение; электромотор через зубчатую передачу перемещает руль высоты в положение, при котором дирижабль возвращается в горизонтальное положение (рис. 31). Конструкции подобных автопилотов относятся к группе маятниковых.
Румпельный автопилот яхты (флюгерный, прямого действия) П.2. Аэродинамическое качество некоторых летательных аппаратов и птиц (ru.wikipedia.org›Аэродинамическое качество)
Механизация крыла
Предкрылок
Интерцептор
Схема обтекания
Boeing-747 с выпущенными закрылками и предкрылками
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 3457; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.58.103.70 (0.009 с.) |


 Принципиальная схема автоматического управления, разработанная К. Э. Циолковским, состоит из всех основных элементов, которые имеются в современных автопилотах «непрямого» действия. В таких автопилотах чувствительный элемент воздействует на управление не непосредственно, а через специальную машину, приводящую в движение орган управления дирижаблем или самолетом.
Принципиальная схема автоматического управления, разработанная К. Э. Циолковским, состоит из всех основных элементов, которые имеются в современных автопилотах «непрямого» действия. В таких автопилотах чувствительный элемент воздействует на управление не непосредственно, а через специальную машину, приводящую в движение орган управления дирижаблем или самолетом.