Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Перемещение, которое допускается в данный момент времени наложенными на систему связями без их нарушения.
Возможные перемещения должны быть бесконечно малыми, т.к.: - при конечных перемещениях система может перейти в другое положение, где условия равновесия могут быть другими; - при конечных перемещениях могут быть нарушены связи, наложенные на систему, и тогда она будет иметь другой вид. В общем случае для точек и тел системы может существовать множество различных возможных перемещений. Однако, среди них могут оказаться зависимые друг от друга перемещения, т.е. одно перемещение может быть выражено через другое. Число степеней свободы системы – это количество независимых между собой воз- Можных перемещений. Например, для свободной точки можно указать три независимых возможных перемещения (все три – линейные), а для свободного тела – шесть (три – линейные и три –
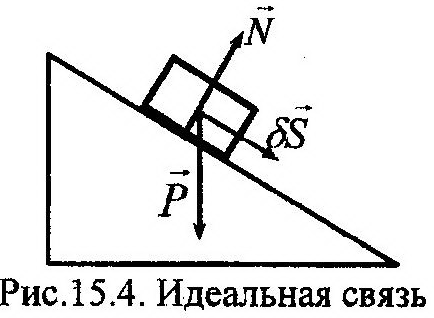
Введем понятие идеальной связи, реакция которой нормальна возможному перемеще-
Введем понятие виртуальной работы, δА, как элементарной работы, совершаемой силой на возможном перемещении. Обозначим виртуальную работу активной силы, δАа, и δАr. Рассмотрим систему n материальных точек (рис. 15.5), которая под действием всех прило-женных к ней сил и связей находится в равновесии. Все связи системы будем считать идеальными. Тогда сумма виртуальных работ реакций этих связей будет:
Поскольку система находится в равновесии, постольку между главными векторами всех активных сил и сил реакций, приложенных к каждой точке, будет иметь место следующее соотношение:
Отсюда следует, что на любом возможном перемещении δSk сумма работ этих сил будет равна нулю, т.е.:
Аналогичные равенства могут быть записаны для любой точки механической системы. Сложив почленно все n уравнений вида (15.15), получим:
Если на систему будут наложены идеальные связи, то, с учетом (15.13), получим:
или:
В аналитической форме выражение (15.17) будет иметь следующий вид:
где δxk, δyk, δzk – проекции возможного перемещения δSk на координатные оси.
|
|||||||||||
|
|
Последнее изменение этой страницы: 2017-01-21; просмотров: 308; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.222.69.152 (0.004 с.) |
 где k1, k2 – скалярные коэффициенты.
где k1, k2 – скалярные коэффициенты.