Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Классификация бортовых систем предупреждения столкновений самолетов в воздухе.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Система предупреждения столкновений самолетов в воздухе (TCAS) Система TCAS обеспечивает: · Обнаружение пролетающих рядом самолетов, как оборудованных так и не оборудованных системой TCAS. · Передачу информации пролетающим рядом самолетам и находящимся в рабочей зоне наземным станциям. · Прием информации от пролетающих рядом самолетов, оборудованных системой TCAS. · Создание «защитной зоны» вокруг своего самолета и выдачу рекомендаций экипажу для обеспечения безопасного расхождения с другими самолетами на встречных и встречнопересекающихся курсах. · Выдачу экипажу звуковых и визуальных команд, позволяющих действовать в нужном направлении для избежания столкновения в воздухе. Основные технические характеристики приведены в таблице 5.1. Таблица 5.1. Основные тактико-технические данные БСПС типа TCAS II.
Блок-схема системы TCAS II
Рис.5.3. Схема действия системы TCAS II.
Наземные РЛС
Зона обнаружения РЛС.
Зона обзора аэродромной РЛС.
Структура сигнала запроса при трехимпульсном подавлении.
Структура ответного кода.
Uc+Uп
   Uп Uп

  
  
Структурная схема корреляционного автокомпенсатора.
Uоп
Упрощенная схема СДЦ в структуре РЛС
Амплитудно-частотная характеристика системы ЧПК.
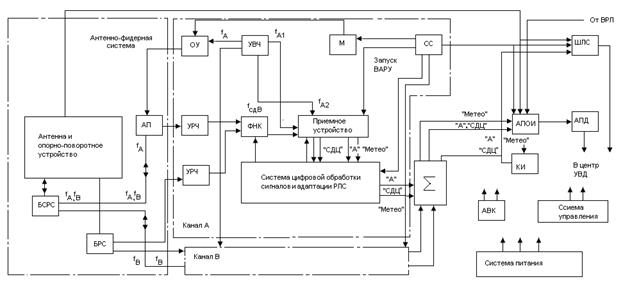
Принцип формирования зоны обнаружения трассовой РЛС в вертикальной плоскости. Тактико-технические характеристики трассовой РЛС Дальность действия при нулевых углах закрытия, км, по самолету типа: Ту-144 при Нпол=13…20 км……………………………………………..400 Ту-154, Ил-62 при Нпол=10 км…………………………………………..340 Ил-18 при Нпол=6 км……………………………………………………..250 Минимальная дальность действия, км……………………………………12 Зона обзора в вертикальной плоскости,°: верхний угол места, не менее……………………………………………45 нижний угол места, не более……………………………………………0,5 Вероятность правильного обнаружения при вероятности ложных тревог (по собственным шумам приемника), не более 10-6…………………….0,8 Средняя квадратическая погрешность на выходе АПОИ: по дальности, м, не более ……………………………………………300 по азимуту,´, не более ………………………………………………......8 Разрешающая способность: на выходе АПОИ: по дальности, м, не более ……………………………………………650 по азимуту,°, не более ………………………………………………......2 Коэффициент подпомеховой видимости на фоне помех от местных предметов при вращающейся антенне, дБ: при двухкратном череспериодном вычитании ……………………18 при трехкратном череспериодном вычитании …………………….24 Коэффициент подавления помех от местных предметов, дБ, не менее..42 Коэффициент подавления помех от метеообразований, дБ……………18 Наличие встроенного вторичного радиолокационного канала ……. Есть Темп обновления и выдачи информации,с …………..…………….10 и 20 Число направлений передачи информации в цифровом виде по стандартным телефонным каналам …………………………….3 Возможность выдачи информации: в аналоговом виде по широкополосной линии (кабелю) на расстояние до 5 км. ………………………………………………………………… Есть о границах метеообразований (в двух градациях)………………...Есть
Полное время включения, мин, не более ………………………………..12 Среднее время наработки на отказ, ч ………………………………….1100 Среднее время восстановления, мин …………………………………….25 Потребляемая мощность по первичной сети электропитания 380 В, 50 Гц, кВт, не более ………………………………………………………………150 Рабочая длина волны, см …………………………………………………23 Разнос каналов А и В по частоте, МГц…………………………………...56 Габаритные размеры отражателя антенны, м ……………………….10,5×15 Ширина ДНА в горизонтальной плоскости по уровню 3 дБ,° нижнего луча и верхнего луча…………………………………1,1±0,1 Коэффициент усиления антенны, дБ: по нижнему лучу и верхнему………………………………………...36 Уровень боковых лепестков антенны, дБ: по нижнему лучу и верхнему………………………………………..-20 Потери в радиопрозрачном укрытии антенны, дБ………………………1,7 Возможность управления поляризацией от линейной до круговой (плавно): в канале нижнего луча ……………………………………………….Есть в канале верхнего луча……………………………Нет(только круговая) Длительность зондирующего импульса, мкс ………………………..3,3±0,3 Средняя частота повторения импульсов, Гц……………………………333 Изменение периода повторения импульсов……………………………Есть Импульсная мощность передатчика, мВт, не менее…………………….3,6 Коэффициент шума приемника, дБ, не более……………………………4,8 Промежуточная частота, МГц ……………………………………………35 Ширина полосы пропускания приемника на промежуточной частоте, МГц……………………………………………………………………0,6±0,1 Динамический диапазон системы цифровой обработки сигналов и адаптации, дБ: по амплитудному каналу, не менее ……………………………………18 по каналу СДЦ, не менее………………………………………………..42 Характеристики квадратурной цифровой системы СДЦ: кратность череспериодного вычитания ……………………………..2 и 3 коэффициент подавления помех, дБ, не менее ………………………..42 дальность действия, км ………………………………………………..390
где, КГ – кварцевый генератор; КС – ключевая схема; ИВН – источник высокого напряжения; СУУ – смесительно-усилительное устройство; М – модулятор
Рис.2.3 Структурная схема передающего устройства двухчастотной РЛС (один частотный канал)
Схема квадратурного вазового детектирования.
Принцип действия формирователя нижней кромки зоны обзора в вертикальной плоскости.
Принцип действия адаптивного аттенюатора помех.
Структурная схема обнаружителя по критерию «K из N».
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-28; просмотров: 629; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.21.12.244 (0.009 с.) |