
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение степени подвижности механизма по формуле Чебышева П.Л.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
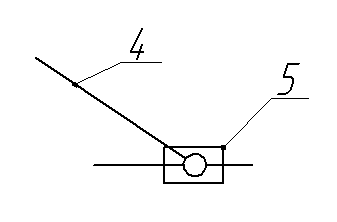
Степень подвижности механизма определяется по формуле W=3(n-1)-2 n-число всех звеньев, включая неподвижное звено;
n=6; 6-2 6-5 1-2 2-3 3-4 4-5
Степень подвижности: W=3∙(6-1)-2∙7-0=15-14=1
Определение класса и порядка структурных групп Ассура данного механизма.
Разобьем механизм на группы Ассура. Группы звеньев, которые сами по себе обладают нулевой степенью подвижности, называются группами Ассура. В группы Ассура входят только такие подвижные звенья механизма, которые образуют между собой кинематические пары пятого класса.
1) Кривошип со стойкой(звенья 1 и 6). Начальная(исходная группа) звеньев.
Группа Ассура первого класса первого порядка
2) Звенья 2 и 3
Группа Ассура первого класса второго порядка
3) Звено 4 и 5.
Группа Ассура второго класса третьего порядка Кинематический анализ. Для кинематического исследования механизмов существуют методы: Ø Аналитический Ø Графоаналитический Ø Экспериментальный
Мы будем использовать графоаналитический. Основным методом графического исследования является построение: - Планов положений механизма; - Планов скоростей; - Планов скоростей механизма.
Для определения положений всех звеньев механизма в различные моменты времени внутри цикла движения механизма строится план положений ведущего звена. Он строится для 12-ти положений ведущего звена. Для характерных положений механизма строятся планы скоростей и ускорений. Построение плана скоростей основано на теореме о скоростях точек плоской фигуры: скорость любой точки определяется как скорость этой точки в поступательном движении вместе с полюсом и в относительном движении относительно этого полюса. Построение планов ускорений основывается на теореме об ускорениях точек плоской фигуры: ускорение любой точки подвижного звена механизма определяется как ускорение той точки в поступательном движении вместе с полюсом и в относительном движении (вращательном) относительно этого полюса.
1.4.Построение планов скоростей.
Планом скоростей называется векторное изображение всех скоростей точек механизма в данном положении в определенном масштабе.
Целью построения плана скоростей является определение величины направления скоростей различный точек звеньев механизма в данном ею положению. В основу метода построений плана скоростей положены теоремы механики о сложном движении твердого тела. В механики всякое мгновенное абсолютное движение плоского тела рассматривается как совокупность поступательного движения тела вместе с любой точкой, взятой за полюс, и вращательного движения вокруг этого полюса.
Рассмотрим порядок построения планов скоростей на примере 2-го положения механизма.
Нам известна угловая скорость ведущего звена (
1)Линейная скорость точки А:
2)Вычислим масштаб плана скоростей:
Где 2)Линейная скорость:
3)Линейная скорость точки С:
|
|||||
|
|
Последнее изменение этой страницы: 2016-12-13; просмотров: 945; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.139.235.100 (0.012 с.) |

 -
-  , где
, где -число кинематических пар 5-го класса:
-число кинематических пар 5-го класса: -число кинематических пар 4-го класса.
-число кинематических пар 4-го класса. =0;
=0;  = 6-1 = 7
= 6-1 = 7

 =const):
=const): =
=  =
=  =4.19
=4.19 

 =
=  =4.19 ∙0.2= 0.84
=4.19 ∙0.2= 0.84 
 =
=  =
=  =0.02
=0.02 
 -длина вектора скорости на плане скоростей(мм).
-длина вектора скорости на плане скоростей(мм).
 =
=  +
+ 
 +
+  , где
, где
 =
=  ∙
∙  43∙0.01=0.43 (м/с)
43∙0.01=0.43 (м/с) =
= 
 =
=  ∙
∙ 


