
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематика материальной точки. Системы отсчета. Траектория, перемещение, путь, средняя путевая и средняя скорость по перемещению.Содержание книги
Поиск на нашем сайте
Кинематика материальной точки. Системы отсчета. Траектория, перемещение, путь, средняя путевая и средняя скорость по перемещению. Кинема́тика точки — раздел кинематики, изучающий математическое описание движения материальных точек. Основной задачей кинематики является описание движения при помощи математического аппарата без выяснения причин, вызывающих это движение. Основная задача механики – определить положение тела в любой момент времени. Механическое движение – это изменение положения тела в пространстве с течением времени относительно других тел. Материальная точка – тело, размерами которого в условиях данной задачи можно пренебречь. Система отсчета – тело отсчета, система координат, связанная с ним, и прибор для измерения времени. Перемещение – направленный отрезок (вектор) между начальным и конечным положением тела. Траектория (l) – линия, вдоль которой движется тело. Путь (S) – длина траектории.
Скорость (V) – величина, показывающая какой путь проходит тело за единицу времени. · Скорость движения · Средняя путевая скорость · Мгновенная скорость/ скорость движения
За единицу скорости принимают скорость такого равномерного прямолинейного движения, при котором тело за одну секунду перемещается на один метр. Ускорение – это величина, показывающая, как изменяется скорость за одну секунду. При движении материальной точки М ее координаты Поэтому для задания закона движения м.т. необходимо указать либо вид функциональной зависимости всех трех ее координат от времени:
либо зависимость от времени радиус-вектора этой точки
Три скалярных уравнения (1.2) или эквивалентное им одно векторное уравнение (1.3) называются кинематическими уравнениями движения материальной точки. Равномерное и равнопеременное движения. Координатное и графическое представления. Криволинейное движение. Нормальное и тангенциальное ускорение. Криволинейное движение – это движения, траектории которых представляют собой не прямые, а кривые линии. (движение всегда с ускорением) Частный случай – движение по окружности. При криволинейном движении ускорение представляем, как сумму нормального и тангенциального ускорения.
- нормальное ускорение, направлено к центру кривизны траектории и характеризует изменения скорости по направлению: - тангенциальное ускорение направлено по касательной к траектории и характеризует изменения скорости по модулю. Закон Сохранения Импульса Для вывода закона сохранения импульса рассмотрим некоторые понятия. Совокупность материальных точек (тел), рассматриваемых как единое целое, называется механической системой. Силы взаимодействия между материальными точками механической системы называются внутренними. Силы, с которыми на материальные точки системы действуют внешние тела, называются внешними. Механическая система тел, на которую не действуют внешние силы, называется замкнутой (или изолированной). Если мы имеем механическую систему, состоящую из многих тел, то, согласно третьему закону Ньютона, силы, действующие между этими телами, будут равны и противоположно направлены, т. е. геометрическая сумма внутренних сил равна нулю. Рассмотрим механическую систему, состоящую из n тел, масса и скорость которых соответственно равны т 1, m 2,..., тn и v 1, v 2,..., v n. Пусть F '1, F '2,..., F 'n — равнодействующие внутренних сил, действующих на каждое из этих тел, a f 1, f 2,..., F n — равнодействующие внешних сил. Запишем второй закон Ньютона для каждого из n тел механической системы: d/dt(m1v1)= F '1+ F 1, d/dt(m2v2)= F' 2+ F 2, d/dt(mn v n)= F 'n+ F n. Складывая почленно эти уравнения, получим d/dt (m1 v 1+m2 v 2+... + mn v n) = F '1+ F '2+...+ F ' n + F 1+ F 2+...+ F n. Но так как геометрическая сумма внутренних сил механической системы по третьему закону Ньютона равна нулю, то d/dt(m1v1+m2v2 +... + mnvn)= F 1 + F 2+...+ F n, или dp/dt= F 1+ F 2+...+ F n, (9.1) где импульс системы. Таким образом, производная по времени от импульса механической системы равна геометрической сумме внешних сил, действующих на систему.
В случае отсутствия внешних сил (рассматриваем замкнутую систему)
Это выражение и является законом сохранения импульса: импульс замкнутой системы сохраняется, т. е. не изменяется с течением времени. Закон сохранения импульса справедлив не только в классической физике, хотя он и получен как следствие законов Ньютона. Эксперименты доказывают, что он выполняется и для замкнутых систем микрочастиц (они подчиняются законам квантовой механики). Этот закон носит универсальный характер, т. е. закон со хранения импульса — фундаментальный закон природы.
Вычисление момента инерции. Примеры. Теорема Штейнера. Момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния d между осями(теорема Гюйгенса-Штейнера) Найдем зависимость между моментами инерции тела относительно параллельных осей z и z', одна из которых проходит через центр масс С тела. Проведем остальные оси так, как это показано на рис. 3.6
По определению осевых моментов инерции имеем ,
Тогда
Так как
Пружинный маятник. Гармонические колебания. Характеристики гармонических колебаний: смещение, амплитуда, фаза, циклическая частота, период, скорость, ускорение. Дифференциальное уравнение гармонических колебаний. Колебания — повторяющийся в той или иной степени во времени процесс изменения состояний системы. Например, при колебаниях маятника повторяются отклонения его в ту и другую сторону от вертикального положения; при колебаниях в электрическом колебательном контуре повторяются величина и направление тока, текущего через катушку. Классификации колебаний Выделение разных видов колебаний зависит от свойства, которое хотят подчеркнуть. Для подчёркивания разной физической природы колеблющихся систем выделяют, например, колебания: механические (звук, вибрация); электромагнитные (свет, радиоволны, тепловые); комбинации вышеперечисленных; По характеру взаимодействия с окружающей средой: вынужденные – колебания, протекающие в системе под влиянием внешнего периодического воздействия; собственные или свободные – колебания при отсутствии внешних сил, когда система, после первоначального воздействия внешней силы, предоставляется самой себе (в реальных условиях свободные колебания всегда затухающие); автоколебания – колебания, при которых система имеет запас потенциальной энергии и она расходуется на совершение колебаний (пример такой системы - механические часы). Пружинный маятник Колебательная система в этом случае представляет собой совокупность некоторого тела и прикрепленной к нему пружины. Пружина может располагаться либо вертикально (вертикальный пружинный маятник), либо горизонтально (горизонтальный пружинный маятник).
где ах – ускорение, m - масса, х - смещение пружины, k – жесткость пружины. Это уравнение называют уравнением свободных колебаний пружинного маятника. Оно правильно описывает рассматриваемые колебания лишь тогда, когда выполнены следующие предположения: 1)силы трения, действующие на тело, пренебрежимо малы и поэтому их можно не учитывать; 2) деформации пружины в процессе колебаний тела невелики, так что можно их считать упругими и в соответствии с этим пользоваться законом Гука. Закон Гука, устанавливает линейную зависимость между упругой деформацией твердого тела и приложенным механическим напряжением. Напр., если стержень длиной l и поперечным сечением S растянут продольной силой F, то его удлинение = Fl/ ES, где E — модуль упругости (модуль Юнга). Математический маятник.
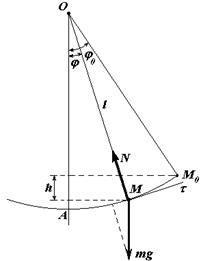
Математическим маятником называется тяжёлая материальная точка, которая двигается или по вертикальной окружности (плоский математический маятник), или по сфере (сферический маятник). В первом приближении математическим маятником можно считать груз малых размеров, подвешенный на нерастяжимой гибкой нити.
mW = F + N, (1)
Уравнение (1) мы получили по второму закону Ньютона, который является основным законом динамики и гласит, что производная по времени от количества движения материальной точки равна действующей на неё силе, т. е.
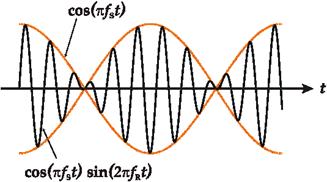
Биения Биения — явление, возникающее при наложении двух гармонических колебаний близкой частоты и выражающееся в периодическом уменьшении и увеличении амплитуды суммарного сигнала. Частота изменения амплитуды суммарного сигнала равна разности частот двух исходных сигналов. Биения возникают от того, что один из двух сигналов постоянно отстаёт от другого по фазе и в те моменты, когда колебания происходят синфазно, суммарный сигнал оказывается усилен, а в те моменты, когда два сигнала оказываются в противофазе, они взаимно гасят друг друга. Эти моменты периодически сменяют друг друга по мере того как нарастает отставание.
Политропические процессы. Политропический процесс, политропный процесс, изменение состояния физической системы, при котором сохраняется постоянной её 000803080010020500010001118теплоёмкость (С). Кривая на термодинамических диаграммах, изображающая П. п., называется 000803080010090008110000политропой. Простейшим примером обратимого П. п. может служить П. п. с 000803080010004050001801809030007идеальным газом, определяемый уравнением pVn = const, где р — давление, V — объем газа,
Энтропия. Из теоремы Клаузиуса следует, что приведенная теплота подобно энергии (потенциальной, внутренней) является функцией состояния (не зависит от пути перехода и зависит только от состояния системы). Независимость интеграла
от пути перехода означает, что этот интеграл выражает собой изменение некоторой функции состояния системы, она называется энтропия и обозначается буквой S. Изменение энтропии системы, очевидно, равно
Мы говорим только об изменении энтропии (подобно изменению потенциальной энергии, для которой не важно где начало отсчета). Из уравнения (9.30) вытекает основное количественное выражение второго начала термодинамики Микро- и макросостояния Микросостояние — это состояние системы, определяемое одновременным заданием координат и импульсов всех составляющих систему частиц. Знание микросостояния в некоторый момент времени позволяет однозначно предсказать эволюцию системы во все последующие моменты. Макросостояние — это состояние системы, характеризуемое небольшим числом макроскопических параметров. Одно макросостояние может быть реализовано большим числом микросостояний за счет перестановки частиц, не меняющей наблюдаемого состояния. Статистическое описание больших систем существенно опирается на следующие постулаты. 1. Все разрешенные микросостояния равновероятны. 2. Термодинамически равновесным является то макросостояние, которое реализуется наибольшим числом микросостояний, т. е. является наиболее вероятным состоянием Кинематика материальной точки. Системы отсчета. Траектория, перемещение, путь, средняя путевая и средняя скорость по перемещению. Кинема́тика точки — раздел кинематики, изучающий математическое описание движения материальных точек. Основной задачей кинематики является описание движения при помощи математического аппарата без выяснения причин, вызывающих это движение. Основная задача механики – определить положение тела в любой момент времени. Механическое движение – это изменение положения тела в пространстве с течением времени относительно других тел. Материальная точка – тело, размерами которого в условиях данной задачи можно пренебречь. Система отсчета – тело отсчета, система координат, связанная с ним, и прибор для измерения времени. Перемещение – направленный отрезок (вектор) между начальным и конечным положением тела. Траектория (l) – линия, вдоль которой движется тело. Путь (S) – длина траектории.
Скорость (V) – величина, показывающая какой путь проходит тело за единицу времени. · Скорость движения · Средняя путевая скорость · Мгновенная скорость/ скорость движения
За единицу скорости принимают скорость такого равномерного прямолинейного движения, при котором тело за одну секунду перемещается на один метр. Ускорение – это величина, показывающая, как изменяется скорость за одну секунду. При движении материальной точки М ее координаты Поэтому для задания закона движения м.т. необходимо указать либо вид функциональной зависимости всех трех ее координат от времени:
либо зависимость от времени радиус-вектора этой точки
Три скалярных уравнения (1.2) или эквивалентное им одно векторное уравнение (1.3) называются кинематическими уравнениями движения материальной точки.
|
|||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-12; просмотров: 336; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.165.235 (0.013 с.) |

 и радиус-вектор
и радиус-вектор  изменяются с течением времени t.
изменяются с течением времени t.




 ,
,  .
.

 и согласно (3.8)
и согласно (3.8)  получаем
получаем


 .
.
 показатель политропы (Cp и Cv — теплоёмкости газа соответственно при постоянном давлении и объёме). Используя 000803080010031000200500805101101800818уравнение состояния идеального газа, уравнение политропы можно записать в ином виде:
показатель политропы (Cp и Cv — теплоёмкости газа соответственно при постоянном давлении и объёме). Используя 000803080010031000200500805101101800818уравнение состояния идеального газа, уравнение политропы можно записать в ином виде:  const или
const или  const (здесь Т — абсолютная температура).уравнение П. п. идеального газа включает, как частные случаи, уравнения: 00080308001000408000100100адиабаты (С =0, n = Cp/Cv, это отношение теплоёмкостей обозначают g), 00080308001000700100100изобары (С = Ср, n = 0), 000803080010007010100изохоры (С = Cv, n = ¥) и 00080308001000701051018изотермы (С = ¥, n = 1). Работа А идеального газа в П. п. против внешнего давления определяется по формуле
const (здесь Т — абсолютная температура).уравнение П. п. идеального газа включает, как частные случаи, уравнения: 00080308001000408000100100адиабаты (С =0, n = Cp/Cv, это отношение теплоёмкостей обозначают g), 00080308001000700100100изобары (С = Ср, n = 0), 000803080010007010100изохоры (С = Cv, n = ¥) и 00080308001000701051018изотермы (С = ¥, n = 1). Работа А идеального газа в П. п. против внешнего давления определяется по формуле  , где индексами 1 и 2 обозначены начальное и конечное состояния газа. Понятием П. п. широко пользуются в технической термодинамике при исследовании рабочих циклов тепловых двигателей.
, где индексами 1 и 2 обозначены начальное и конечное состояния газа. Понятием П. п. широко пользуются в технической термодинамике при исследовании рабочих циклов тепловых двигателей.





