Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
І. Механічні характеристики електроприводу з двигуном змінногоСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Струму (приклади і задачі).
1. Асинхронний двигун з фазним ротором типу МТ31-6 (Рн = 11,0кВт, Uн = 380 В, Ін =28,4 А, nн =953 об/хв, r 1= 0,415 Oм, x1 =0,465 Ом, U2k = 200 В; І2н = 35,4А; г2 = 0,132 Ом, х2 =27 Ом, kе = 1.84, λ= Мк/Мн = 3,1) працює з реактивним моментом на валі М = 95 Н∙м. Визначити величину пускового моменту цього двигуна та його кутову швидкість при статичному навантаженні, якщо в коло ротора ввести додатковий резистор з опором R = 1,1 Ом. Розв'язок Приведені опори ротора до обмоток статора: r'2 = r2∙ kе2; r'2 = 0,132∙1,842 = 0,447 Ом; Rд'= Rд ∙ kе2; Rд' = 1,1 ∙ 1,842 = 3,724 Ом; х'2 = х2∙ kе2; x2 = 0,27 ∙ 1,842 = 0,914 Ом. Індуктивний опір при короткому замиканні: хк = х1 + х2; хк = 0,465 + 0,914 = 1,379 Ом. Номінальна кутова швидкість: ωн = π ∙ nн /30; ωн = π ∙ 953 /30 = 99,8 рад/с. Синхронна кутова швидкість: ω0 = π ∙ n0 / 30; ω0 = π ∙ 1000 / 30 = 104,7 рад/с. Номінальний момент на валі двигуна: Мн = Рн/ ωн; Мн = 11 ∙ 103 / 99,8 = 110,2 Н ∙ м. Критичний момент двигуна: Мк = 3,1 ∙ Мн: Мк = 3,1 ∙ 110,2 = 341,6 Н ∙ м. Механічна характеристика асинхронного двигуна:
Критичне ковзання на штучній характеристиці:
Відносна величина активного опору статора:
Пусковий момент на штучній характеристиці (s = 1.0)
Співвідношення критичного й статичного моментів λС = МН / МС: λС = 341,6 / 95 = 3,6. Ковзання на штучній характеристиці при М= МС:
SCl = 24,9: SC2 = 0,336. Приймаємо SC2 = 0,336, яке відповідає режимові двигуна (Sc1 відповідає режимові противмикання). Швидкість обертання на штучній характеристиці при М = Мс: nс = (1 – SС): nс = 1000 ∙ (1 ∙ 0,336) = 664 об/хв. Кутова швидкість на штучній характеристиці при М = Мс: ωс =ω0 (1– SC): ωс = 104,7 ∙ (1 – 0,336) = 69,5 рад/с.
2. Асинхронний двигун потужністю Рн = 400 кВт (Uн = 380 В, nн =970 об/хв, U2k = 535 В; І2н = 475 А; λ= Мк / Мн = 2,5) приводить в рух підіймальний механізм. При опусканні вантажу зі швидкістю nс = 0,3 nн двигун працює в режимі противмикання з навантаженням Мс = 0,8 Мн. Визначити, що треба зробити з резистором у колі ротора, щоб при падінні напруги живлення на 20% забезпечити задану швидкість опускання вантажу.
Розв'язок. Синхронна кутова швидкість: ω0 = π ∙ n0/30; ω0 = π ∙ 1000/30 = 104,7 рад/с. Номінальне ковзання: Sн = (n0 – nн)/ n0; Sн = (1000 – 970)/1000 = 0,03. Критичне ковзання:
Активний опір обмотки однієї фази ротора:
; Ковзання при статичному навантаженні: Sc = Sн ∙ Мс / Мн; Sc = 0,03 ∙ 0,8 = 0,024. Ковзання при опусканні вантажу, коли Uм = Uн:
Опір додаткового резистора в колі ротора: Rд = (Sc пр. / Sс – 1) ∙ r2; Rд = (1,29 / 0,024 – 1) ∙ 0,0195 = 1,03 0м. Критичне ковзання на штучній характеристиці: Sкш = Sнш ∙ (r2 + Rд) / r2; Sкш = Sк ∙ (0,0195 + 1.03) / 0,0195 = 53,8 Sк. Співвідношення моментів при пониженій напрузі: λС = λ ∙ku2 ∙ Мн / Мс ; λС = 2,5 ∙ 0,64/0.8 = 2,0. Ковзання на штучній характеристиці:
Кутова швидкість двигуна при пониженій напрузі живлення: ωс = ω0 (1- SCш); ωс = 104,7 ∙ (і – 2,08) = –113 рад/с. Величина опору додаткового резистора в колі ротора, з яким двигун при пониженій напрузі буде працювати з заданою швидкістю:
Отже, треба зменшити опір додаткового резистора на ΔR = Rд – Rд 1; ΔR = 1,03 – 0,631 = 0,399 Ом.
3. У краново-металургійного асинхронного двигуна з фазним ротором типу MTF312-6 (Рн = 17,5 кВт, Uн = 380 В, Ін = 42,5 А, nн = 950 об/хв, r 1= 0,23 Oм, x1 =0,334 Ом, U2k = 233 В; І2н = 54 А; г2 = 0,107 Ом, х2 =244 Ом, kе = 2,66, λ = Мк / Мн = 2,4) з реактивним статичним навантаженням Мс = 108 Н. м потрібно змінити напрям обертання зміною двох фаз живлення статора. Визначити: - величину опору резистора, який треба при цьому ввести додатково в коло ротора для обмеження початкового гальмівного моменту до Мпр =0.81Мк; - величину моменту двигуна при зупинці (пускового в протилежному напрямку обертання); - кутову швидкість двигуна в протилежному напрямку, якщо величина статичного моменту при реверсуванні не зміниться. Розв'язок Приведені опори ротора до обмоток статора: r'2 = r2∙ kе2; r'2 = 0,107 ∙ 2,662 = 0,757 Ом; х'2 = х2∙ kе2; x2 = 0,244 ∙ 2,662 = 1,726 Ом. х н = х1 + х'2; хн = 0,344 + 1,726 = 2,06 Ом. Номінальна кутова швидкість: ωн = π ∙ nн /30; ωн = π ∙ 950 /30 = 99,5 рад/с. Синхронна кутова швидкість: ω0 = π ∙ n0 /30; ω0 = π ∙ 1000/30 = 104,7 рад/с. Номінальний момент двигуна: Мн = Рн / ωн; Мн = 17,5 ∙ 103 / 99,5 = 175,9 Н∙м. Критичний момент двигуна: Мк = 2,4 ∙ Мн; Мк = 2,4 ∙ 175.9 = 422,2 Н∙м. Початковий момент при противмиканні: Мпр = 0,8 ∙ Мк; Мпр = 0,8 ∙ 422,2 = 337,7 Н∙м. Номінальне ковзання: Sн = (n0 – nн) / n0; Sн = (1000 – 950)/1000 = 0,05. Ковзання на природній характеристиці при М = Мс: Sc = Sн • Мс / Мн; Sc = 0,05 ∙ 108 / 175,9 = 0,0306. Ковзання на штучній характеристиці при противмиканні
Sш = 1 + (1 – Sc); Sш = 1 + (1 – 0,0306) = 1,97. Відносна величина активного опору статора:
Співвідношення моментів критичного та противмнкання: λпр= Мк / Мпр. λпр = 422,2 / 337,7 = 1,25. Критичне ковзання на штучній характеристиці:
Sкш1 = 4,08; Sкш2 = 0,95. Приймаємо Sкш = 4,08, тому що це ковзання відповідає меншому гальмівному струмові. Величина приведеного додаткового опору в колі ротора:
Абсолютне значення опору додаткового резистора в колі ротора: Rд = R'д / kе2; Rд = 7,7 / 2,662 = 1,4 Ом. Величина пускового моменту на штучній характеристиці:
Співвідношення критичного й статичного моментів λс = Мк / Мс; λс = 422,2 / 108 = 3,91. Ковзання на штучній характеристиці при М = Мс:
Sш1.1= 34,04; Sш1.2 = 0,45. Приймаємо Sш1 = 0,45, тому що це ковзання відповідає режиму двигуна в протилежному напрямку обертання.
Кутова швидкість у протилежному напрямку обертання: ωш = ω0 (1 – Sш1.2); ωш = 104,7 - (1 – 0,45) = 57,7 рад/с.
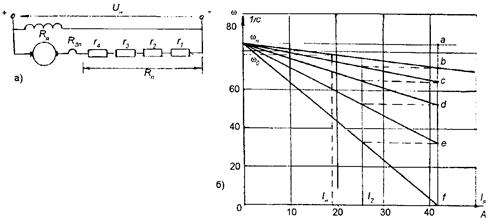
4. Асинхронний двигун з фазним ротором типу MTF411-8 (Рн = 18 кВт, Uн = 380 В, Ін = 46,7 А, nн = 700 об/хв, r 1= 0,327 Oм, x1 =0,53 Ом, U2k = 221 В; І2н = 59 А; г2 = 0,117 Ом, х2 =0,26 Ом, kе = 2,04, λ = Мк / Мн = 2,5) повинен працювати в режимі динамічного гальмування зі швидкістю ωш = – 32 рад/с. Статорна обмотка вмикаєтся до джерела постійного струму за схемою на рис.1. Активний статичний момент на валу двигуна М = 175 Н∙м. Рис.1. Схема динамічного гальмування двигуна. Визначити величину опору додаткових резисторів, які потрібно ввімкнути симетрично в коло ротора, щоб критичний момент у режимі динамічного гальмування дорівнював критичному моментові в рушійному режимі при номінальній напрузі живлення статора. Розв'язок Номінальна кутова швидкість: ωн = π ∙ nн /30; ωн = π ∙ 700 /30 = 73,3 рад/с. Синхронна кутова швидкість: ω0 = π ∙ n0 /30; ω0 = π ∙ 750/30 = 78,5 рад/с. Номінальний момент двигуна: Мн = Рн / ωн; Мн = 18 ∙ 103 / 73,3 = 245,6 Н∙м. Номінальне ковзання: Sн = (n0 – nн) / n0; Sн = (750 - 700)/750 = 0.067. Приймаємо, що відносна швидкість при номінальному моменті динамічного гальмування дорівнює номінальному ковзанню:
Vс = Sн; Vн = 0,067. Відносна швидкість при Мс = 175 Н∙м на характеристиці динамічного гальмування без додаткового резистора в колі ротора: Vc = Vн ∙ Мс / Мн; Vс = 0,067 ∙ 175/245,6 = 0,0475. Відносна швидкість на характеристиці з додатковим резистором Rx в колі ротора: Vс1= ωс / ω0; Vcl = 32 / 78,5 = 0,408. Величина опору додаткового резистора в колі ротора: Rд = r2 ∙ (Vcl / Vc –1); Rд = 0,117 ∙ (0,408 / 0,0475 –1) = 0,888 Ом. 5. Для асинхронного двигуна типу МТВ211-6 (Рн = 7,5 кВт, Uн = 380 В, Ін = 20,8 А, nн = 935 об/хв, r 1= 0,68 Oм, x1 =1,07 Ом, U2k = 255 В; І2н = 19,8 А; г2 = 0,44 Ом, х2 =0,88 Ом, kе = 1,38, λ = Мк / Мн = 2,5) розрахувати графоаналітичним методом опори резисторів для його пуску в три ступені. Момент статичного навантаження на валі двигуна Мс = 0,55 Мн; максималь- ний момент перемикання М1 = 150 Н∙м. Розв'язок Приведені опори ротора до обмоток статора: r'2 = r2∙ kе2; r'2 = 0,44 ∙ 1,382 = 0,838 Ом; х'2 = х2∙ kе2; x2 = 0,88 ∙ 1,382 = 1,68 Ом. х к = х1 + х'2; хк = 1,07 + 1,68 = 2,75 Ом. Номінальна кутова швидкість: ωн = π ∙ nн /30; ωн = π ∙ 935 /30 = 97,9 рад/с. Синхронна кутова швидкість: ω0 = π ∙ n0 /30; ω0 = π ∙ 1000/30 = 104,7 рад/с. Номінальне ковзання: Sн = (n0 – nн) / n0; Sн = (1000 – 935)/1000 = 0,065. Номінальний момент двигуна: Мн = Рн / ωн; Мн = 7,5 ∙ 103 / 97,9 = 76,6 Н∙м. Критичний момент двигуна: Мк =2,5 ∙Мн; Мк =2,5 ∙76,6 = 191,5 Н∙м. Відносна величина активного опору статора:
Критичне ковзання на природній характеристиці:
Sк1= 0,36; Sк1 = 0,0114. Механічна характеристика асинхронного двигуна:
Задаючись значеннями ковзання від S = 0 до S = Sк, розраховуємо й зводимо в табл.1 та будуємо на рис.2. робочу частину природної механічної характеристики. Статичний момент навантаження: Мс = 0,55∙Мн; Мс = 0,55∙76.6 = 42,1 Н∙м. Мінімальний момент перемикання: Мн ≥ 1,2∙Мн; Мн ≥ 1,2∙42,1 ≥ 50,6 Н∙м. Таблиця 1.
Для визначення величини опорів пускових резисторів будуємо пускову діаграму в такій послідовності. Проводимо вертикальну лінію через точку з координатами: М = М1, S = 1. Ця вертикаль перетне природну характеритику в точці b й горизонтальну лінію, яка проходить через точку з координатами: М = 0, 5 = 0, в точці а. З'єднавши точки з координатами: М = 0, S = 0 та М = M1, S = 1, одержимо спрямлену штучну механічну характеристику двигуна з повністю введеними в коло ротора додатковими резисторами. Підбираючи М2 ≥ 50,6 Н∙м, поступовим наближенням будуємо пускову діаграму в три ступені (рис. 2.).
Рис.2. Пускова діаграма двигуна. З пускової діаграми визначаємо величину опорів додаткових резисторів, взявши до уваги, що відрізок ab = r2. de = Rд1; Rд1 = r2∙de/ab: cd = Rд2: Rд2 = r2∙cd/ab: bс = Rд3; Rд3 = r2 ∙bc/ab; be = Rп; Rп = r2 ∙be/ab: Rд1 = 0,44 ∙2,875 = 1,265 Ом; Rд2 = 0,44∙1331 = 0674 Ом; Rд3 = 0,44 ∙0,844 = 0,371 Ом; Rп = Rд1 + Rд2 + Rд3; Rп = 1.265 + 0.674 + 0.371 = 2.31 Ом.
6. Для асинхронного двигуна типу МТВ612-10 (Рн = 60 кВт, Uн = 380 В, Ін = 145 А, nн = 578 об/хв, U2k = 245 В; І2н = 153 А; λ = Мк / Мн = 3,0) розрахувати аналітичним методом опори резисторів, які потрібно ввімкнути додатково в коло ротора для запуску двигуна в чотири ступені (m = 4). Момент статичного навантаження при пуску Мс = 0,42 Мн; максимальний момент перемикання М1 = 2,1 Мн. Механічні характеристики двигуна на робочих ділянках вважати прямо - лінійними. Розв'язок Номінальна кутова швидкість: ωн = π ∙ nн /30; ωн = π ∙ 578 /30 = 60,5 рад/с. Синхронна кутова швидкість: ω0 = π ∙ n0 /30; ω0 = π ∙ 600/30 = 62,8 рад/с. Номінальне ковзання: Sн = (n0 – nн) / n0; Sн = (600 – 578)/600 = 0,0367. Номінальний момент двигуна: Мн = Рн / ωн; Мн = 60 ∙ 103 / 60,5 = 991,3 Н∙м. Критичний момент двигуна: Мк = 3,0∙Мн; Мк = 3,0∙991,3 = 2973,9 Н∙м. Максимальний момент перемикання: М1 = 2,1∙Мн; М1= 2,1∙991,3 = 2081,7 Н∙м. Момент статичного навантаження: Мс = 0,42∙Мн; Мс = 0,42∙991,3 = 416,3 Н∙м. Мінімальний момент перемикання: М2 ≥ 1,2∙Мс: М2 ≥ 1,2∙416,3 ≥ 499,6 Н∙м.
Активний опір обмотки однієї фази ротора:
Співвідношення максимального й мінімального моментів:
Опори додаткових резисторів: Rд4 = r2 ∙(λ –1); Rд4 = 0,034 ∙ (1,9 – 1) = 0,031 Ом. Rд3 = Rд4 ∙ λ; Rд3 = 0,031 ∙ 1,9 = 0,058 Ом. Rд2 = Rд3 ∙ λ; Rд2 = 0,058 ∙ 1,9 = 0,11 Ом. Rд1 = Rд2 ∙ λ; Rд1 = 0,11 ∙ 1,9 = 0,21 Ом. Мінімальний момент перемикання: М2 = M1 / λ: М2 = 2081,7 / 1.9 = 1095,6 Н∙м. Мінімальний момент перемикання М2 > 1.2 Мс, отже запуск двигуна здійсниться за заданим законом.
ІІ. Механічні характеристики електроприводу з двигуном постійного Струму (приклади і задачі). 7. Для двигуна постійного струму з незалежним збудженням потужністю Рн = 11 кВт (Uн = 220 В, Ін = 59 А, (ωн = 314 1/с) визначити ККД при номінальному навантаженні та величину внутрішнього опору якоря, враховуючи, що при номінальному навантаженні його постійні й змінні втрати рівні між собою. Розрахувати та побудувати: - природну електромеханічну характеристику; - штучну з введеним послідовно в коло якоря додатковим резистором з опором Rд = 1,63 Ом; - штучну при динамічному гальмуванні, в якої при номінальній швидкості струм у колі якоря дорівнює 118 А; визначити також опір додаткового резистора, який треба ввести послідовно в коло якоря для одержання цієї характеристики. Розв'язок Коефіцієнт корисної дії двигуна:
Внутрішній опір якоря двигуна: Rяд = 0,5∙(Uн∙Ін –Рн∙103)/Ін2; Rяд = 0,5 ∙ (220 ∙ 59 – 11 ∙ 103)/592 = 0,284 Ом. Конструктивний коефіцієнт:
Кутова швидкість неробочого ходу: ω0 =Uн /сФн; ω0 = 220 / 0,647 = 340 рад/с. Природна електромеханічна характеристика будується через дві точки з координатами: Ія = 0, ω = ω0, та Ія = Ін., ω = ωн. Ця характерисика повинна обовязково проходити через точку з координатами: ω = 0, Ія = Ікз. Це дає можливість проконтролювати правильність розрахунку. Струм короткого замикання кола якоря: Ікз = Uн / Rяд; Ікз = 220 / 0,284 = 774,5 А. Треба відмітити, що струм короткого замикання у 13,1 разів більший від номінального. Кутова швидкість на штучній характеристиці при номінальному навантаженні:
Штучна електромеханічна характеристика будується через точки з координатами: Ія = 0, ω = ω0, та Ія = Ін, ω = ωш. Електромеханічна характеристика динамічного гальмування будується через точки з такими координатами: Ія = 0, ω = 0, та Ія = –118А, ω =ωн. Величина опору додаткового резистора, який потрібно ввести послідовно в коло якоря при динамічному гальмуванні:
Розраховані характеристики зображені на рис. 7.1.
Рис. 7.1. Розрахункові характеристики двигуна.
8. Для двигуна постійного струму з незалежним збудженням потужністю Рн = 3,2 кВт (Uн = 220 В, Ін = 19 А, nн = 750 об/хв., Rяд = 0,735 Ом) розрахувати аналітичним і графоаналітичним методами опори пускових резисторів у чотири ступені. Максимальний струм перемикання І1 = 41,8 А. Струм статичного навантаження Іс = 17 А. Мінімальний струм перемикання І2 потрібно визначити. Розв'язок Аналітичний метод Співвідношення І1 / І2 = λ,
Опори пускових резисторів: r1 = λ3 ∙(λ –1) ∙ Rяд; r1 = 1,643 ∙ (1,64 – 1) ∙ 0,735 = 2,05 Ом.
r2 = λ2 ∙(λ –1) ∙ Rяд; r2 = 1,642 ∙ (1,64 – 1) ∙ 0,735 = 1,26 Ом. r3 = λ ∙(λ –1) ∙ Rяд; r3 = 1,64 ∙ (1,64 – 1) ∙ 0,735 = 0,76 Ом. r4 = (λ –1) ∙ Rяд; r4 = (1,64 – 1) ∙ 0,735 = 0,46 Ом. Сумарний опір пускових резисторів: Rп = r1 + r2 + r3 + r4; Rп = 2,05 + 1,26 + 0,76 + 0,46 = 4,53 Ом. Сумарний опір кола якоря: Rкя = Rп + Rяд; Rкя = 4,53 + 0,735 = 5,265. Схема вмикання резисторів показана на рис. 7.2 а. Графоаналітичний метод Номінальна кутова швидкість: ωн = π ∙ nн /30; ωн = 3,14 ∙ 750/30 = 78,5 рад/с. Конструктивний коефіцієнт двигуна:
Кутова швидкість неробочого ходу: ω0 = Uн / сФн; ω0 = 220 / 2,62 = 84 рад/с. Будується природна характеристика ω = f(Ія), яка проходить через точки з координатами: Ія = 0, ω = ω0, та Ія = Ін, ω = ωн. Мінімальний струм перемикання: І2 = І1/ λ; І2 = 41,8 / 1,64 = 25,5 А. Провівши вертикальні лінії через І1 та І2 до перетину з природною характеристикою будується відтак пускова діаграма в чотири ступені, починаючи від точки з координатами: Ія = І1, ω = 0. Остання горизонтальна лінія повинна прийти в точку b. На діаграмі відрізок аb ~ Rяд, fе ~ r1, ed ~r2, dc ~ r3, cb ~ г4.
Отже, опори пускових резисторів: r1 = fe/ab ∙ Rяд; r1 = 2,82 ∙ 0,735 = 2,07 Ом. r2 = ed/ab ∙ Rяд; r2 = 1,73 ∙ 0,735 = 1,27 Ом r3 = dc/ab ∙ Rяд; r3 = 0,95 ∙ 0,735 = 0,77 Ом r4 = cb/ab ∙ Rяд; r4 = 0,63 ∙ 0,735 = 0,46 Ом Повний опір пускових резисторів: Rп = fb/ab ∙ Rяд; Rп = 6,2 ∙ 0,735 = 4,57 Ом Аналітичний і графоаналітичний методи розрахунку дали достатньо близькі значення опорів пускових резисторів.
Рис. 8.1. Схема включення додат – кових резисторів а) і характеристики Двигуна.
9. Визначити приведені до валу двигуна статичний момент і момент інерції механізму підіймача (рис. 9.1) при підійманні вантажу масою 1300 кг з швидкістю V = 1,7 м/с. Двигун обертається з кутовою швидкістю ω = 97 рад/с. Діаметр барабана Dб = 0,65 м, момент інерції Jб = 8,1 кг ∙м2. Коефіцієнт корисної дії (ККД) передач η = 0,82. Момент інерції редуктора, приведений до валу двигуна, Jр = 0,12 кг∙м2. Масою троса можна знехтувати.
Розв'язок Статичний момент, приведений до валу двигуна, при підійманні вантажу:
Кутова швидкість барабана:
Передавальне число передач:
Момент інерції, приведений до валу двигуна:
Довідниковий матеріал. Таблиця №1 Класифікація кранів по режимам роботи
Таблиця №2. Дані фактичного режиму роботи різних кранів
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-12; просмотров: 642; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.31.251 (0.012 с.) |