Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Назначение, решаемые задачи и функциональный состав тракта ШПСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Введение
Среди средств наблюдения за обстановкой, применяемых на подводных лодках, основное значение имеют пассивные средства и в частности средства шумопеленгования, работа которых не демаскирует подводную лодку и обеспечивает сохранение ею основного тактического преимущества - скрытности действия. Кроме того, благоприятные гидрологические условия и низкий уровень собственных помех обеспечивают возможность обнаружения сильношумящих надводных целей на очень больших дистанциях, доходящих до 200 км и более и превосходящих дальности действия любых других средств наблюдения. Необходимость установки на современных кораблях большого количества разнообразной аппаратуры, широкий круг задач, решаемых гидроакустическими средствами, и стремление обеспечить максимальную экономию средств, габаритов и массы привели к появлению в составе их радиотехнического вооружения сложных многофункциональных гидроакустических комплексов, состоящих из большого числа разнообразных гидроакустических средств, конструктивно связанных между собой. Ранее были рассмотрены общие вопросы, касающиеся гидроакустических средств, и дана обобщенная характеристика типового гидроакустического комплекса (ГАК). Очевидно, что следующий этап работы должен предусматривать изучение основных составных частей ГАК - его трактов. Исходя из этого ниже приводятся сведения, характеризующие особенности построения и работы устройств тракта шумопеленгования в звуковом диапазоне частот.
Назначение, решаемые задачи и функциональный состав тракта ШП Тракты шумопеленгования гидроакустических комплексов (ШП ГАК) являются пассивными средствами наблюдения, обеспечивающими поиск, обнаружение целей по сплошной части спектра шумового поля в звуковом диапазоне частот (ЗДЧ), а также измерение угловых координат для выработки целеуказания оружию. Дополнительно тракт позволяет производить объективную классификацию целей оператором по характеру спектра и вырабатывать классификационные признаки в процессе длительного слежения за ними. В наиболее полном объеме тракт ШП аналоговых и аналогово-цифровых (АЦ) ГАК решает следующие задачи: • поиск, полуавтоматическое и автоматическое обнаружение одиночных сильношумящих и групповых надводных целей в ближней зоне акустической освещенности (БЗАО) и в дальних зонах акустической освещенности (ДЗАО); • поиск, полуавтоматическое и автоматическое обнаружение одиночных сравнительно малошумных подводных целей в ближней и первой ДЗАО; • грубое определение угловых координат целей при их обнаружении с дискретной выдачей данных в счетно-решающее устройство (СРУ) систем управления оружием; • точное определение угловых координат в процессе слежения за целями с непрерывной выдачей текущих значений в СРУ систем управления оружием; • предварительная субъективная классификация целей оператором на слух (по характеру спектра шумов) и визуально (по признакам, выявляемым на экранах индикаторов); • подготовка исходных данных для объективной классификации. В ряде ГАК при использовании бортовых антенн в виде протяженной решетки тракт дополнительно решает задачи поиска, полуавтоматического обнаружения и определения координат целей с повышенной разрешающей способностью по курсовому углу (КУ) для выявления одиночных целей в составе групповой. В качестве критериев при делении тракта на функциональные каналы используются класс решаемых задач (обнаружение или точное определение координат в процессе длительного сопровождения) и способ обзора пространства при обнаружении (круговой или секторный, последовательный или параллельный и т.д.). Как правило, в состав тракта входят один или несколько каналов обнаружения и несколько каналов автоматического сопровождения целей (АСЦ) Количество каналов определяется числом и разнообразием решаемых носителем тактических задач и возможностями размещения на нем аппаратуры с точки зрения массогабаритных характеристик. Для типового тракта ЩП АЦ ГАК характерны (рис 1). а) при использовании основной носовой цилиндрической антенны • канал последовательного кругового обзора – ПКО; • канал одновременного кругового обзора – ОКО; • несколько идентичных каналов автоматического сопровождения целей АСЦ-1,АСЦ-2,...,АСЦ-ЛГ; • два идентичных устройства прослушивания - УПр-1, УПр-2, подключаемых независимо к любому из каналов АСЦ; б) при использовании бортовой антенны в виде протяженной плоской решетки: • канал бортового (последовательного секторного) обзора - БО (ПСО), • дополнительный канал автоматического сопровождения целей – АСЦ-Д; • устройство прослушивания - УПр-3, подключаемое к каналу АСЦ-Д.
Рис. 1. Обобщенная структурная схема тракта ШП ЗДЧ Акустическая антенна (АА) – предназначена для: Ø преобразование акустической энергии в электрическую энергию, Ø совместно с другими устройствами тракта шумопеленгования формирует и вращает ДН в горизонтальной плоскости (ГП) и вертикальной плоскости (ВП). Канал последовательного кругового обзора (канал ПКО) -предназначен для: преобразование акустической энергии в электрическую энергию, формирования и вращает ДН в горизонтальной плоскости (ГП) и вертикальной плоскости (ВП), совместного с другими устройствами тракта шумопеленгования, предварительной обработки сигнала при помощи предварительных усилителей (ПУ), которые решают задачи: предварительного усиления сигнала для снижения влияния электрических помех; защиты входных цепей тракта от сигналов большой интенсивности; предварительной частотной селекции и распределения стимулирующего сигнала при контроле работоспособности. формирования и сканирования ДН в вертикальной плоскости ФрДН ВП, додетекторной обработки ПФ и УОГ, формирования и сканирования ДН в горизонтальной плоскости ФрДН ГП, детекторной Д и последетекторной УПДО обработок, отображения и регистрации информации УОИ и PC, синхронизации и управления работой УСн.
Любое пассивное средство включает в свой состав четыре группы устройств (рис.1.2), последовательно решающих задачи: Ø пространственно-временную обработку (ПВО); Ø частотно-временную обработку (ЧВО); Ø принятия решения и отображения информации; Ø синхронизации и управления работой. Пространственно-временная обработка (ПВО) служит для предварительной оптимизации характеристик обнаружения и селекции сигналов в координатах пространство-время. Другими словами, она начинается с приема информации и заканчивается формированием диаграммы направленности, обеспечивающей пространственную избирательность. Эту задачу решают устройства преобразования энергии (акустическая антенна - АА), формирования временных распределений и суммирования входного сигнала (смеси полезного сигнала и помехи) (формирователи диаграммы направленности в вертикальной и горизонтальной плоскостях - ФрДН). Названные устройства в совокупности с сопутствующими им, например устройствами предварительной обработки УПрО, называют диаграммоформирующими устройствами. Устройства частотно-временной обработки производят дальнейшее преобразование входного сигнала в интересах выделения полезного сигнала с заданными вероятностными характеристиками и передачу последнего в устройства отображения информации УОИ и регистрации сигналов PC для решения задач обнаружения цели, и для определения угловых координат целя в процессе длительного автоматического сопровождения ее. При решении первой задачи используют в основном аддитивные и корреляционные обнаружители, реализующие максимальный метод пеленгования. Во втором случае применяют обнаружители-пеленгаторы, реализующие нулевой метод пеленгования.
Рис. 1. 2. Упрощенная функциональная схема одного канал обнаружения и пеленгования тракта ШП В обоих случаях схемы производят вычисление корреляционного интеграла. Однако при обнаружении вычисляется автокорреляционная функция входного процесса от двух половин рабочего сектора антенны, а при пеленговании - автокорреляционная функция входного процесса от одной половины рабочего сектора антенны и его производной от другой. Указанные задачи решают устройства додетекторной УДО, детекторной КД и последетекторной ПДО обработок. Взаимосвязь между устройствами и изменение режимов их работы осуществляют устройствами синхронизации и управления работой УСн. При использовании бортовых антенн дополнительно включается коммутатор борта (КмБ), а при сопряжении с УОИ цифрового вида - устройства преобразования информации в двоичный код (УПИ). Ряд устройств при комплексировании являются общетрактовыми и участвуют в работе всех или нескольких каналов (УОИ, ЦВС, УСн).
Рис. 1. 3. Структура типового тракта обнаружителя Задачей любого тракта обнаружения является (помимо представления сигнала в виде, удобном для принятия решения), преобразование смеси сигнала и помехи таким образом, чтобы заданное отношение сигнал/помеха на выходе решающего звена (коэффициент надежности приема - Качество тракта обработки характеризуется отношением этих коэффициентов Эффективность тракта ШП определяется его тактическими и связанными с ними техническими параметрами. К основным тактическим параметрам относятся: дальность действия, сектор и способ обзора пространства, точность определения угловых координат, разрешающая способность и др. Основными техническими параметрами являются: диапазон рабочих частот, параметры амплитудно-частотных и фазовых характеристик, диаграмм направленности и др. Дальность действия средств шумопеленгования зависит в основном от трех факторов: Ø уровня шумности цели, Ø условий распространения звука в морской среде; Ø энергетического потенциала. Для пассивных трактов энергетический потенциал определяется, прежде всего, помехоустойчивостью, под которой понимают минимальное отношение сигнал/помеха на входе тракта, обеспечивающее заданные вероятности правильного обнаружения и ложных тревог на его входе с учетом коэффициента различимости индикаторов. Решение задач обнаружения в широком диапазоне шумности целей от десятых долей до сотен паскалей привело к созданию двух независимых каналов: первый (ПКО), оптимизирован для обнаружения средне- и сильно шумящих целей в диапазоне до нескольких сотен километров, второй (ОКО) - для обнаружения малошумящих целей на дистанциях до нескольких десятков километров. В первом случае для повышения помехоустойчивости рабочий диапазон канала разбит на три поддиапазона с шириной полосы пропускания 1,5 2 октавы и частотами, оптимизированными к БЗАО, - 3-й частотный диапазон (ЧД), 1-й и 2-й ДЗАО - 2-й и 1-й ЧД соответственно. Во втором случае для уменьшений объема аппаратуры канал ОКО оптимизирован только для 1-й ДЗАО, поэтому его частотный диапазон соответствует 2-му ЧД канала ПКО. В ряде аналоговых и АЦ ГАК используются протяженные (в несколько десятков метров) антенны; расположенные по бортам носителя в зоне с минимальным уровнем помех и обеспечивающие работу каналов обнаружения целей с высокой разрешающей способностью по КУ и каналов автоматического сопровождения. Каналы БО (ПСО) оптимизированы к работе по сильношумящей групповой цели во 2-й и 1-й ДЗАО и имеют, как правило, два частотных диапазона, приблизительно равных 1-му и 2-му ЧД канала ПКО. По сравнению с каналами обнаружения, пеленгаторы (каналы АСЦ) имеют более высокий порог принятия решения, обусловленный требованиями к устойчивости сопровождения цели в любом из ЧД, поэтому дальность действия указанных каналов не превышает 0,7 от максимальной дистанции обнаружения. Каждый канал АСЦ основной носовой цилиндрической антенны может работать в любом из трех диапазонов частот по любой цели, обнаруженной каналами ПКО и ОКО, а канал АСЦ-Д - в любом из двух диапазонов частот канала БО. При субъективной классификации целей оператором с помощью устройств прослушивания весь рабочий диапазон тракта для выявления классификационных признаков разделяется на два поддиапазона. В результате, дистанции прослушивания шумов целей составляют 0,7 от максимальной дальности их обнаружения каналами ОКО и ПКО. Поисковый потенциал каналов обнаружения характеризуется пределами и периодом обзора пространства, зависящими от способа обзора и предъявления информации оператору. При использовании носовой цилиндрической антенны сектор обзора в горизонтальной плоскости составляет в среднем 300° и ограничивается корпусом носителя и значительным уровнем помех работе ГАК от гребных винтов. В вертикальной плоскости сектор определяется наиболее вероятными углами прихода лучей при разных типах гидрологии и составляет ±(15 20)°. В каналах с последовательным обзором пространства информация от цели с определенного направления поступает дискретно с периодом вращения ДН. Время поступления информации определяется шириной ДН и скоростью ее вращения. В результате, отношение времен обзора пространства Для исключения пропуска малошумных целей необходим многоканальный обнаружитель с одновременным обзором пространства, каждый канал которого производит пространственную и частотно-временную обработку информации в телесном угле, определяемом ДН. Тогда время обзора становится равным времен ни наблюдения за целью. Для уменьшения габаритов и массы аппаратуры обзор пространства в вертикальной плоскости производится дискретно с шагом, равным ширине ДН. Выбор требуемого угла наклона (УН) ДН производится оператором по рекомендации БИУС или на основе учета гидрологии в соответствии с руководящими документами. Для канала БО сектop обзора в ГП определяется возможностью сканирования ДН и составляет в среднем (30.. 150)° на каждый борт. Сканирование в ВП, как правило, не производится. Сектор обзора определяется шириной ДН и составляет на низких частотах десятки градусов. С учетом того, что канал работает по сильношумящей групповой цели, при обнаружении используется последовательный обзор сектора с малыми скоростями: десятые доли градуса в секунду на дистанциях в сотни километров и единицы градусов в секунду на дистанциях в десятки километров. Секторы обзора каналов АСЦ в обеих плоскостях, как правило, соответствуют пределам обзора каналов обнаружения. При использовании устройств пространственной обработки каналов АСЦ в трактах гидролокации сектор обзора в ВП увеличивается до (40...50), что позволяет производить обнаружение целей в зоне тени за счет донных отражений. Скорость сопровождения определяется максимально возможной тангенциальной составляющей скорости цели и не превышает 1 °/с Скорость наведения ДН на цель может достигать десятков градусов в секунду и ограничивается техническими возможностями приводов сопровождения. Под разрешающей способностью каналов по КУ ( Наиболее распространенный мерой количественной оценки точности измерения КУ является среднеквадратичная ошибка пеленгования. При большом отношении сигнал/помеха на входе индикаторного устройства потенциальная приборная ошибка пеленгования определяется выражениями:
где
КАНАЛЫ ОБНАРУЖЕНИЯ ЦЕЛЕЙ
Рис. 2.1. Структурная схема типового канала ПКО
Антенна располагается в специальной выгородке в носовой оконечности носителя, в зоне с минимальным уровнем помех при работе тракта. Для более эффективного использования объема выгородки иногда на единой несущей конструкции (в виде герметичной капсулы цилиндрической формы) совмещают антенны разных трактов ГАК. Общее число приемных элементов антенны
Антенна тракта ШП дополнительно обеспечивает прием сигналов тракта связи и опознавания. Устройства предварительной (ПУ) обработки решают задачи: предварительного усиления сигнала для снижения влияния электрических помех; защиты входных цепей тракта от сигналов большой интенсивности; предварительной частотной селекции и распределения стимулирующего сигнала при контроле работоспособности. В состав устройства входят Устройства формирования и сканирования ДН в ВП обеспечивают для каждого из Устройства додетекторной обработки обеспечивают частотную селекцию входного процесса по трем частотным диапазонам и его стационаризацию (нормирование). В ряде случаев, когда они являются общими для каналов ПКО и ОКО, устройства располагаются между формирователями ДН в горизонтальной и вертикальной плоскостях (рис.2.1). Частотная селекция осуществляется квазиоптимальным диапазонным полосовым фильтром с прямоугольной передаточной характеристикой. Функцию нормирующего устройства выполняет усилитель-ограничитель (УОГ). Нормирование входного сигнала дополнительно позволяет автоматизировать процесс обработки. Входной сигнал трех частотных диапазонов параллельно поступает в устройство формирования и сканирования ДН в ГП канала ПКО, а 2-го ЧД - дополнительно и в аналогичное устройство канала ОКО. Устройство формирования и вращения ДН в горизонтальной плоскости обеспечивает в каждом частотном диапазоне формирование трех разнесенных в пространстве ДН и их синхронное вращение в ГП. Использование в канале мультипликационного способа обработки потребовало формирования промежуточных ДН от правой и левой половин рабочего сектора антенны. Результирующая ДН получается за счет перемножения сигналов полусумм на корреляционном детекторе. Рассмотренный вариант относится к максимальному корреляционному методу, формирующему на выходе симметричную автокорреляционную функцию. Формирование ДН производится за счет компенсации времен запаздывания фронта волны на приемных элементах цилиндрической антенны и последующего суммирования процесса на пассивных линиях задержки. Рабочим является сектор антенны порядка 120°. Для уменьшения Вращение ротора с постоянной скоростью обеспечивается исполнительным двигателем, входящим в состав электромеханического привода, работа которого будет рассмотрена в дальнейшем Входной сигнал с различных направлений наблюдения, число которых кратно ширине ДН, по каждому из трех ЧД поступает в устройства детекторной обработки. Устройства детекторной (корреляционной) обработки (рис.2.2) достаточно просто реализуются на основе перемножителя по схеме 2-полу-периодного фазочувствительного ключевого детектора КД. Число параллельно работающих устройств определяется количеством синхронно вращающихся ДН и частотных диапазонов. Сигнал от одной половины рабочего сектора антенны (основная цепь) после промежуточного усиления, компенсирующего затухание в индукционном компенсаторе, поступает на сигнальные входы ключей ФЧД.
Рис. 2.2. Структурная схема детекторной и последетекторной обработок Сигнал от другой половины (опорная цепь) с помощью усилителя-ограничителя преобразуется в прямоугольные импульсы, построенные на точках его перехода через нуль, и поступает на управляющие входы ключей ФЧД. Выходной эффект на фильтре нижних частот (интеграторе) ФНЧ1 будет максимальным при совпадении фаз процесса в обеих цепях. При возникновении сдвига по фазе за счет отклонения ДН от направления на цель выходной эффект уменьшается и становится равным нулю при сдвиге, равном 90°. В результате формируется автокорреляционная функция, соответствующая пеленгационной характеристике обнаружителя при максимальном методе пеленгования. Постоянная времени ФНЧ1 приблизительно согласована с длительностью импульса в 1-м частотном диапазоне. Устройства последетекторной обработки производят параллельную обработку сигнала в трех ЧД и отличаются постоянными времени ФНЧ Каждое устройство обеспечивает квазиоптимальную фильтрацию огибающей входного сигнала, согласованную со спектром серии из Эффективная длительность импульса определяется шириной ДН и скоростью ее вращения. Его форма повторяет характеристику направленности, а период следования зависит от скорости вращения и числа параллельно сформированных ДН. Максимально возможное число импульсов в серии определяется требуемым При равномерной спектральной плотности мощности помехи (отрезок белого шума) квазиоптимальный фильтр серии из Решение о наличии сигнала принимается по приращению постоянной составляющей на выходе детектора. Однако, даже при отсутствии сигнала, на его выходе всегда присутствует постоянная составляющая и флуктуация помехи. Поэтому для исключения их влияния на работу накопителя производится центрирование процесса, т.е. снятие постоянной составляющей помехи с помощью ФВЧ в виде дифференцирующей цепи. Коммутатор записи КмЗ обеспечивает подключение строго определенной ячейки накопителя при последовательном прохождении каждого НН тремя синхронно вращающимися ДН, а коммутатор, считывания КмС производит последовательное подключение ячеек на выход устройства синхронно с формированием развертки по КУ при отображении и регистрации информации. Управление коммутаторами производится импульсами, сформированными в узле управления (УУ) в зависимости от кода пеленга, поступающего от задающего вала обзора (ЗВО). Устройство преобразования информации обеспечивает масштабирование огибающей процесса для его согласования с размером поля индикаторов, а также преобразование сигнала из аналоговой формы в цифровую (рис. 2. 3). Устройство содержит согласующий усилитель СУ с высоким входным сопротивлением, препятствующим разряду накопительных ячеек, и электронный ключ ЭК, управление которым производится импульсом, сформированным в узле управления УУ. Последовательность выборок поступает параллельно на два масштабирующих усилителя МУ, один из которых работает на УОИ, а второй - на PC.
Рис. 2. 3. Структурная схема устройства преобразования информации Рис. 2.4. Структурная схема устройства синхронизации и регистрации сигналов С помощью преобразователя вал-код ПВК аналоговые значения пеленга и КУ преобразуются в двоичный код. Код пеленга используется для работы коммутаторов записи и считывания информации, а КУ - для формирования разверток в устройстве отображения.
Рис. 2.5. Структурная схема типового канала ОКО
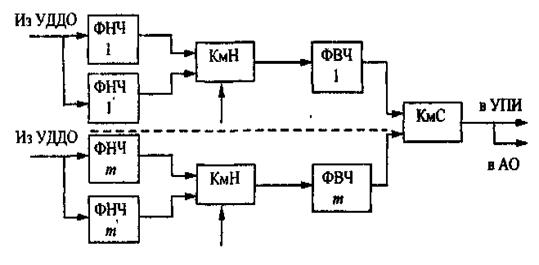
Устройства детекторной и последетекторной обработок обеспечивают: выделение и квазиоптимальную фильтрацию огибающей процесса с двумя постоянными времени, ее центрирование, и сведение результатов обработки в один канал с разнесением по времени для передачи информации в УОИ. Детектирование процесса в каждом из направлений наблюдения производится квадратичными детекторами. Последетекторная обработка (рис. 2.6) реализуется набором ФНЧ. Степень сглаживания флуктуации огибающей зависит от постоянной времени фильтров. Поэтому для реализации "большого" и "малого"накоплений для каждого НН используют две параллельные цепи, состоящие из ФНЧ с соответствующей постоянной времени, и ФВЧ для центрирования сигнала. Переключение цепей производится коммутатором накопления КмН по команде оператора. Считывание информации из параллельных пространственных каналов наблюдения при ее выводе на УОИ обеспечивается с помощью коммутатора считывания КмС.
Рис. 2. 6. Структурная схема устройств последетекторной обработки
Устройства преобразования информации, автоматического обнаружения и управления коммутатором считывания аналогичны таким же устройствам, используемым в канале ПКО. Для синхронизации работы коммутатора считывания с формированием развертки по КУ на УОИ используется код КУ задающего вала обзора канала ПКО.
Рис. 2.7. Структурная схема типового канала БО
Устройства предварительной обработки являются общими для каналов БО и АСЦ-Д и выполняют те же функции, что и в каналах основной антенны. Предварительные усилители ПУ для уменьшения длины кабельных трасс при большой протяженности антенны размещаются в герметичных блоках вне прочного корпуса носителя. Дополнительно устройства обеспечивают переключение антенн правого и левого бортов за счет коммутации цепей их питания. С выхода ПУ в канале БО сигнал поступает в устройства додетекторной обработки УДО, а в канале АСЦ-Д - в устройства формирования и сканирования ДН в ГП. Устройства додетекторной обработки обеспечивают частотную селекцию по двум ЧД, выбор одного из них по команде оператора и нормирование входного процесса. В состав УДO входят полосовые диапазонные фильтры, коммутаторы диапазонов и усилители-ограничители. Данные устройства аналогичны таким же устройствам в каналах обнаружения основной антенны. Устройства формирования и сканирования ДН в горизонтальной плоскости для унификации с каналом АСЦ-Д производят в каждом из двух ЧД формирование ДН от правой и левой половин антенны и их синхронное сканирование с одной из двух скоростей, выбираемой по команде оператора. Формирование ДН производится суммированием сигналов от приемных элементов, а сканирование ДН - введением временных сдвигов между ними с помощью пассивных линий задержки. Устройства детекторной и последетекторной обработок производят квазиоптимальную фильтрацию огибающей процесса (рис. 2.8).
Рис. 2.8. Структурная схема устройств детекторной и последетекторной обработок Постоянная времени ФНЧ (интегратора) согласуется с эффективной длительностью импульса, которая определяется шириной ДН и скоростью обзора пространства и изменяется в пределах от 1 до 8 с. В устройстве предусмотрена возможность переключения ФНЧ с помощью коммутаторов ЧД Км 1 и скорости сканирования Км 2. Выбор ЧД и скорости обзора пространства производится оператором исходя из тактической ситуации. Выходной сигнал после промежуточного усиления поступает на амплитудный регистратор сигналов. Устройство регистрации сигналов является индикатором электромеханическою типа, используемым одновременно и для документирования информации. Принцип работы устройства аналогичен рассмотренному в 2.1 для канала ПКО. Отличие состоит в том, что развертка по КУ формируется одновременно только для одного из ЧД, с одной скоростью обзора пространства (по выбору оператора). Регистрация выбранного режима осуществляется записью на специальном поле справа и слева от развертки вертикальной линии при работе во втором ЧД и с "большой" скоростью сканирования соответственно. Визир КУ обеспечивает полуавтоматическую выдачу данных во внешние системы. Устройство синхронизации выполнено в виде электромеханического привода, обеспечивающего последовательный обзор заданного сектора пространства и синхронизацию формирования развертки по КУ на PC с работой устройства формирования и сканирования ДН в горизонтальной плоскости. В него входят: задающий вал обзора, устройство управления сканированием и исполнительные приводы барабана и курса PC. Задающий вал обзора аналогичен рассмотренному в 2.1 для канала ПКО, но может работать с двумя скоростями вращения за счет изменения амплитуды сигнала, поступающего на тахометрический следящий привод.
КАНАЛЫ ПЕЛЕНГОВАНИЯ ЦЕЛЕЙ
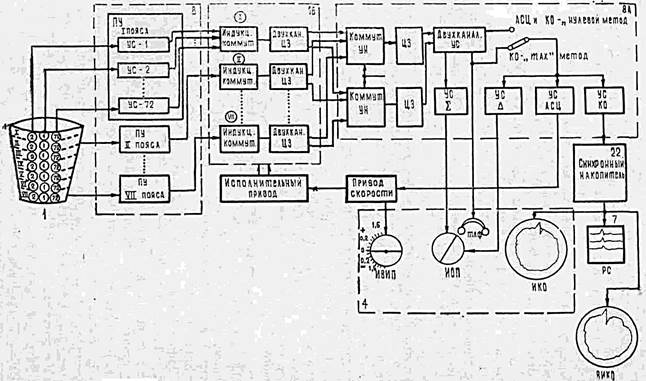
Пеленгование предполагает определение с высокой точностью направления прихода в горизонтальной и вертикальной плоскостях прямых сигналов от объекта наблюдения при длительном слежении за ним. Поэтому каналы пеленгования содержат пеленгатор и связанный с ним следящий привод, обеспечивающий сопровождение цели по угловым координатам. Повышение точности работы пеленгатора и его сопряжение с приводом обеспечиваются применением методов, формирующих несимметричную (нулевую) пеленгационную характеристику, при которой полезный выходной эффект по значению и знаку пропорционален отклонению оси ДН от направления на источник сигнала. К этим методам относятся фазоамплитудный, суммарно-разностный и "нулевой" корреляционный (схема Гванеллы). По точности пеленгования методы почти совпадают, но первые два требуют высокой идентичности как фазовых, так и амплитудных характеристик, а последний - только фазовых. Поэтому пеленгатор по схеме Гванеллы получил наиболее широкое применение. По типу привода каналы АСЦ разделяют на каналы, использующие электромеханический и электронный способы сканирования ДН. Принципиальной разницы между ними нет, и каналы АСЦ различаются только схемными решениями при построении устройств пространственной обработки и приводов сопровождения. Рис. 3.1. Структурная схема типового канала АСЦ Предварительная частотная селекция осуществляется поло
|
||||
|
|
Последнее изменение этой страницы: 2016-09-19; просмотров: 808; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.12.76.168 (0.014 с.) |


 ) обеспечивалось при минимальном отношении сигнал/помеха на входе тракта (коэффициент распознавания -
) обеспечивалось при минимальном отношении сигнал/помеха на входе тракта (коэффициент распознавания -  ).
). , которое называют коэффициентом помехоустойчивости обнаружителя
, которое называют коэффициентом помехоустойчивости обнаружителя и наблюдения за целью (
и наблюдения за целью ( ) для разных ЧД находится в пределах от 8 до 32, что при зональной структуре акустического поля может привести к пропуску цели. Для устранения этого необходимо либо повышать скорость вращения ДН, либо увеличивать число ДН, одновременно осуществляющих обзор пространства. С другой стороны, необходимо, чтобы (
) для разных ЧД находится в пределах от 8 до 32, что при зональной структуре акустического поля может привести к пропуску цели. Для устранения этого необходимо либо повышать скорость вращения ДН, либо увеличивать число ДН, одновременно осуществляющих обзор пространства. С другой стороны, необходимо, чтобы ( , однако в современных аналоговых и АЦ ГАК время накопления ограничивается возможностями памяти, нестабильностью параметров устройств обработки, изменением характера сигнала цели, анизатропностью и нестационарностью помехи и др. В общем случае оно не превышает 50…80 с. Поэтому одноканальный обнаружитель с последовательным обзором не в состоянии производить обнаружение малошумных подводных целей на больших дистанциях (1-й ДЗАО).
, однако в современных аналоговых и АЦ ГАК время накопления ограничивается возможностями памяти, нестабильностью параметров устройств обработки, изменением характера сигнала цели, анизатропностью и нестационарностью помехи и др. В общем случае оно не превышает 50…80 с. Поэтому одноканальный обнаружитель с последовательным обзором не в состоянии производить обнаружение малошумных подводных целей на больших дистанциях (1-й ДЗАО). ) понимают способность раздельного наблюдения двух близкорасположенных целей с равными отношениями сигнал/помеха на входе. Потенциальная (предельная) разрешающая способность определяется формой сигнала и отношением сигнал/помеха на входе устройства обработки. Для достаточно больших отношений и аппроксимации ДН гауссовой кривой
) понимают способность раздельного наблюдения двух близкорасположенных целей с равными отношениями сигнал/помеха на входе. Потенциальная (предельная) разрешающая способность определяется формой сигнала и отношением сигнал/помеха на входе устройства обработки. Для достаточно больших отношений и аппроксимации ДН гауссовой кривой  При прямоугольной аппроксимации
При прямоугольной аппроксимации  где
где  - ширина ДН в ГП.
- ширина ДН в ГП. - для максимального метода;
- для максимального метода; - для фазового метода;
- для фазового метода; - для фазоамплитудного метода,
- для фазоамплитудного метода, - среднегеометрическая длина волны диапазона;
- среднегеометрическая длина волны диапазона;  - расстояние между "эквивалентными приемниками" при делении рабочего сектора антенны на две половины и
- расстояние между "эквивалентными приемниками" при делении рабочего сектора антенны на две половины и  - отношение сигнал/помеха (по мощности) в каналах пеленгатора. Для малых отношений сигнал/помеха при приеме на слух максимальным методом точность пеленгования определяется практически значением
- отношение сигнал/помеха (по мощности) в каналах пеленгатора. Для малых отношений сигнал/помеха при приеме на слух максимальным методом точность пеленгования определяется практически значением  , располагаемых в
, располагаемых в горизонтальных поясах по
горизонтальных поясах по  элементов в каждом. Для формирования ДН в горизонтальной плоскости используется 120-градусный сектор цилиндра, а в вертикальной - его высота.
элементов в каждом. Для формирования ДН в горизонтальной плоскости используется 120-градусный сектор цилиндра, а в вертикальной - его высота. диаграмм направленности, УН осей которых смещен на величину, равную ширине ДН на уровне 0,7 по давлению. Одновременно устройства производят выбор требуемого УН по команде УСн. Формирование ДН с УН = 0° производится при суммировании сигналов от
диаграмм направленности, УН осей которых смещен на величину, равную ширине ДН на уровне 0,7 по давлению. Одновременно устройства производят выбор требуемого УН по команде УСн. Формирование ДН с УН = 0° производится при суммировании сигналов от  при заданном
при заданном  в каждом ЧД одновременно формируется три ДН, оси которых смещены относительно центральной оси на угол 112,5°. В качестве формирователя используется индукционный коммутатор-компенсатор машинного типа, конструктивно хорошо согласующийся с антенной цилиндрического типа. Устройство и работа такого компенсатора подробно были рассмотрены ранее. Работа в трех ЧД обеспечивается тремя идентичными поясами коммутации, расположенными на статоре и роторе компенсатора.
в каждом ЧД одновременно формируется три ДН, оси которых смещены относительно центральной оси на угол 112,5°. В качестве формирователя используется индукционный коммутатор-компенсатор машинного типа, конструктивно хорошо согласующийся с антенной цилиндрического типа. Устройство и работа такого компенсатора подробно были рассмотрены ранее. Работа в трех ЧД обеспечивается тремя идентичными поясами коммутации, расположенными на статоре и роторе компенсатора.
 импульсов, и его центрирование.
импульсов, и его центрирование. и техническими возможностями аналогового емкостного накопителя.
и техническими возможностями аналогового емкостного накопителя. , согласованную со спектром одиночного импульса, а второй – гребенчатую передаточную функцию
, согласованную со спектром одиночного импульса, а второй – гребенчатую передаточную функцию  . Результирующая передаточная функция определяется их произведением. В качестве первого используется RC- фильтр НЧ (интегратор) ФНЧ2 с постоянной времени, равной эффективной длительности импульса для данного ЧД. Для формирования гребенчатой функции используется синхронный фильтр, представляющий собой набор ФНЧ Их количество пропорционально числу направлений наблюдения (НН), кратному отношению величины сектора обзора к ширине ДН. Коммутация фильтров производится синхронно с прохождением диаграммой направленности каждого из НН В результате каждая ячейка фильтра накапливает процесс с определенного НН, а фильтр называют синхронным или накапливающим.
. Результирующая передаточная функция определяется их произведением. В качестве первого используется RC- фильтр НЧ (интегратор) ФНЧ2 с постоянной времени, равной эффективной длительности импульса для данного ЧД. Для формирования гребенчатой функции используется синхронный фильтр, представляющий собой набор ФНЧ Их количество пропорционально числу направлений наблюдения (НН), кратному отношению величины сектора обзора к ширине ДН. Коммутация фильтров производится синхронно с прохождением диаграммой направленности каждого из НН В результате каждая ячейка фильтра накапливает процесс с определенного НН, а фильтр называют синхронным или накапливающим.