Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Системи двозонного регулювання та стабілізації швидкостіСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Загальні відомості
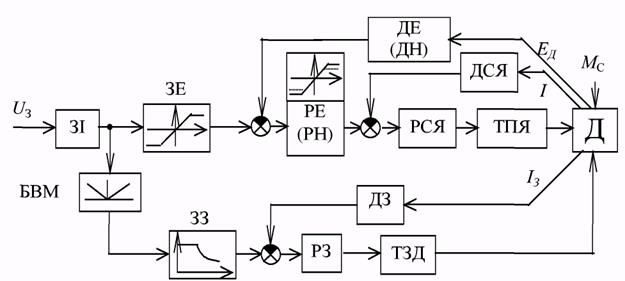
Системи двозонного регулювання швидкості використовують здебільш для потужних електроприводів механізмів, у яких, за умовами технологічного процесу, моменти статичного навантаження зменшуються з підвищенням швидкості. Тоді регулювання швидкості до номінального значення здійснюється за рахунок зміни напруги у якірному колі, а вище номінального значення – за рахунок зміни напруги у колі збудження. До таких приводів належать насамперед головні електроприводи (електроприводи валків) обтискних і неперервних прокатних станів, та приводи головного руху станків. Якірні кола двигунів живляться здебільш від тиристорних перетворювачів, але для живлення потужних двигунів використовують також генератори постійного струму з тиристорним збудженням. За способом узгодження керування між двома зонами системи двозонного регулювання розподіляються на системи залежного, роздільного та параметричного управління. Функціональні схеми таких систем з живленням якоря від ТП показані на рис. 3.1 – 3.3, а коло регулювання напруги генератора для систем Г-Д – на рис.3.4.
Рисунок 3.1 – Система двозонного регулювання швидкості з залежним управлінням ЕРС якоря та поля двигуна
Рисунок 3.2 – Система двозонного регулювання швидкості з роздільним управлінням ЕРС якоря та поля двигуна
Рисунок 3.3 – Система двозонного регулювання швидкості з параметричним управлінням полем двигуна
Рисунок 3.4 – Контур регулювання напруги генератора
У системах з залежним управлінням послаблення поля двигуна здійснюється у функції ЕРС або напруги якоря двигуна, а у системах з роздільним та параметричним засобами керування – у функції вихідної напруги задатчика інтенсивності. Тому ЗІ є обов'язковим елементом систем рис 3.2, 3.3, а у схемі рис.3.1 його може не бути. Тоді пуск та гальмування привода здійснюється у режимі струмообмеження. Структурні схеми ЗІ наведені у Додатку Б на рис. Б.1, а-б. Роздільне управління напругою якоря і полем двигуна здійснюють у системах непрямого регулювання швидкості (без датчика швидкості). Керування швидкістю у першій зоні здійснюється контуром регулювання ЕРС або напруги якоря, а у другій зоні – контуром регулювання струму або потоку збудження. В залежності від структури завдання інтенсивності прискорення та гальмування приводу може відбуватися з постійним динамічним моментом або з постійним динамічним струмом. Структурні схеми задавачів, що забезпечують названі вище режими, зображені на рис.3.5. Вони складаються з ланки з ідеальною релейною характеристикою (РЛ) та інтегратора (І), охоплених від’ємним зворотним зв'язком. Перший з них (а) має постійний темп зміни вихідної напруги, а другий (б) зменшує темп під час послаблення поля двигуна завдяки наявності на вході інтегратора блока множення (БМ) на сигнал, пропорційний потоку збудження.
Рисунок 3.5 - Структурні схеми задавачів інтенсивності: а)із завданням постійного динамічного моменту, б) із завданням постійного динамічного струму
Особливістю систем двозонного регулювання швидкості є також вузол змінного струмообмеження, який називаэться регулятором потужності. Залежність максимально-припустимого струму якоря двигуна від швидкості його обертання наведена на рис.3.6.
Рисунок 3.6 – Діаграма залежності Imax=f(w) Завдання
1. Виконати математичний опис двигуна постійного струму з регулюванням напруги у колі якоря та у колі збудження. 2. Розробити структурну модель двигуна у абсолютних та відносних одиницях. 3. Отримати перехідні процеси у розімкненій системі перетворювач-двигун з тиристорним збудженням при роботі за діаграмами зміни напруги якоря U(t), напруги збудження UЗ(t) та моменту навантаження МС(t), наведеними нарис.3.7. 4. Синтезувати регулятори системи управління згідно з варіантами, наведеними у табл.3.1 (абревіатури П та ПІ позначають пропорційний та пропорційно-інтегральний типи регуляторів), і навести структурну схему синтезованої системи. Передбачити можливість лінеаризації кіл регулювання. 5. Обрати базові величини та виконати нормування структурної схеми. 6. Для систем Г-Д отримати сімейства перехідних характеристик замкненого контуру та логарифмічних амплітудно- та фазо-частотних характеристик розімкненого контуру регулювання напруги генератора для різних значень постійної часу інтегрування розімкненого контуру. 7. Обрати засіб компенсації внутрішнього зворотного зв'язку двигуна за його ЕРС; навести перехідні функції контуру струму якоря за керуючою та збурюючою діями без компенсації та з компенсацією цього зв'язку. 8. Отримати сімейства перехідних характеристик замкнених контурів та логарифмічних амплітудно- та фазо-частотних характеристик розімкнених контурів регулювання, що містять змінні параметри. Зробити висновки щодо 9. Отримати перехідні процеси системи під час розгону до максимальної швидкості у режимі струмообмеження та при роботі з двома описаними вище типами задавачів інтенсивності. 10. Отримати перехідні процеси системи під час прикладання номінального навантаження на основній та максимальній швидкостях. Вивести формули для усталених значень вихідних сигналів та порівняти їх зі значеннями, отриманими за допомогою математичного моделювання. 11. Отримати перехідні процеси гальмування двигуна під дією реактивного навантаження, яке переводить систему у режим струмообмеження. 12. Отримати перехідні процеси двох послідовних проходів заготовки через клітину реверсивного обтискного прокатного стана. Паспортні та розрахункові данні двигуна та перетворювача у якірному колі наведені у додатку А, а характеристика намагнічування двигуна у відносних одиницях задана у табл.3.2.
Таблиця 3.1 – Варіанти завдань
Таблиця 3.2 – Характеристика намагнічування двигуна
Рисунок 3.7 – Діаграми зміни вхідних сигналів двигуна при керуванні напругою якоря та напругою кола збудження
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 645; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.009 с.) |