Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Системи непрямого регулювання швидкостіСодержание книги Поиск на нашем сайте
Загальні відомості
Системи непрямого регулювання швидкості [17, 18] застосовують для управління приводами, що не потребують високих статичних та динамічних показників. Відмовлення від датчика швидкості, роль якого у аналогових системах виконує тахогенератор, підвищує надійність роботи електромеханічної системи, знижує експлуатаційні та капітальні витрати, позбавляє від необхідності боротьби з завадами, зумовленими низько- та високочастотними пульсаціями напруги тахогенератора. Замість зворотного зв'язку за швидкістю в цих системах слід було б використати зворотний зв'язок за ЕРС двигуна ЕД, яка при постійному потоку збудження Ф змінюється прямо пропорційно швидкості w:
ЕД=kФw. (2.1)
Вимірювання ЕРС здійснюють на основі рівняння:
ЕД (p)=UД(p) – RЯД I(p) – L ЯД p I(p)= UД(p) – RЯД I(p)(TЯДp +1), (2.2)
де UД – напруга якоря двигуна; RЯД, L ЯД – активний опір та індуктивність тієї частини якірного кола збоку двигуна, з якої знімається сигнал зворотного зв'язку за напругою; TЯД= L ЯД / RЯД. Але із-за неможливості здійснення операцій ідеального диференціювання струму якоря в системах використовують різноманітні комбінації від’ємного зворотного зв'язку за напругою двигуна та додатного – за струмом якоря, заведених на вхід пропорційного регулятора зовнішнього контуру. Системи непрямого регулювання швидкості можна поділити на системи з постійно діючим контуром струму якоря (двоконтурні) та на системи, у яких контур струму вмикається до роботи тільки у режимі струмообмеження (одноконтурні). У системах з постійно діючим внутрішнім контуром струму якоря зовнішній контур використовують в наступних варіантах: 1) з інерційним датчиком ЕРС (ДЕ); 2) з безінерційним датчиком напруги (ДН); 3) з безінерційним ДН та компенсацією падіння напруги на активному опорі; 4) з моделлю двигуна на виході безінерційного ДН. Цим варіантам відповідають такі рівняння формування сигналу зворотного зв'язку U33і:
де kН – коефіцієнт зворотного зв'язку за напругою; kC = kН× RЯД – коефіцієнт зворотного зв'язку за струмом;
Якщо електромагнітна стала часу двигуна ТЯД досягає значної величини, то на вході системи з датчиком ЕРС встановлюють аперіодичну ланку, а задатчик інтенсивності доповнюють паралельними коректуючими зв'язками, як це показано у Додатку Б на рис. Б.1, а. Одноконтурні системи непрямого регулювання швидкості використовують для управління електроприводами, які мають невеликі значення електромагнітної та електромеханічної сталих часу. Такі параметри характерні для потужних тихохідних двигунів постійного струму з незалежним збудженням, які приводять до руху, наприклад, валки обтискних прокатних станів. Зворотний зв'язок за напругою у цих системах намагаються наблизити не до ЕРС двигуна ЕД, а до ЕРС перетворювача ЕП, що живить якірне коло двигуна:
ЕП (p)=UД(p) + RЯП I(p) + L ЯП p I(p)= UД(p) + RЯП I(p)(TЯПp +1), (2.9)
де RЯП, L ЯП – активний опір та індуктивність тієї частини якірного кола збоку перетворювача, з якої знімається сигнал зворотного зв'язку за напругою;
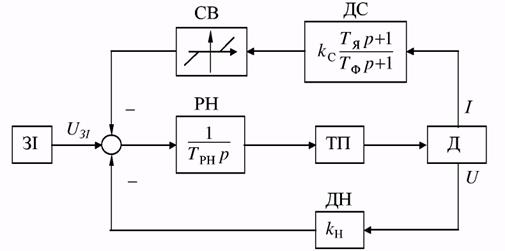
Один з найпростіших варіантів одноконтурної системи з І-регулятором напруги (РН) та вузлом струмової відсічки (СВ) зображено на рис. 2.1. Для компенсації електромагнітної сталої часу датчик струму (ДС) доповнюють реальною форсуючою ланкою.
Рисунок 2.1 - Одноконтурна система непрямого регулювання
Ще один варіант обмеження струму за допомогою ланки "зона нечутливості", увімкненому між датчиком струму та релейною ланкою ЗІ показано на рис.2.2.
Рисунок 2.2 - Одноконтурна система непрямого регулювання швидкості зі струмовою відсічкою, заведеною на ЗІ
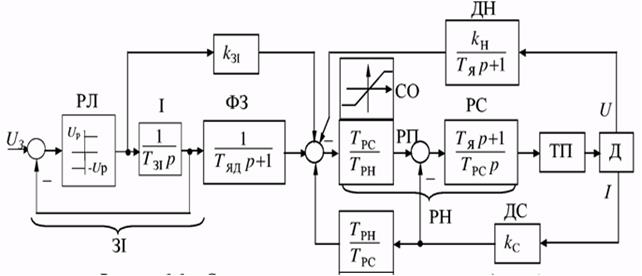
Таким способом струм обмежується за рахунок регулювання прискорення електромеханічної системи та пропорційного йому динамічного струму. Зворотний зв'язок за напругою виконано інерційним, тому регулятор напруги має пропорційно-інтегральну структуру, а на вході його установлено фільтр ФЗ з аперіодичною структурою. Швидкодія у пуско-гальмувальних режимах підвищується за допомогою використання ПІ -задатчика інтенсивності. На рис.2.3 зображена система зі зворотними зв'язками за напругою та струмом якоря, що перемикаються. Коли струм якоря I досягає максимально-допустимого значення Ітах, розподільний підсилювач (РП) з ланкою струмообмеження СО насичується. В цей час система стає нечутливою до зміни від’ємного зворотного зв'язку за напругою та додатного за струмом і починає працювати у режимі струмообмеження. Якщо струм якоря I не перевищує максимально-допустимого значення Ітах, РП працює у лінійній зоні, додатний та від’ємний зворотні зв'язки за струмом взаємно компенсують друг друга, і в системі працює тільки контур регулювання напруги із складеним регулятором РН, що складається з послідовно з'єднаних ПІ -регулятора струму (РС) та розподільного підсилювача.
Рисунок 2.3 – Система непрямого регулювання швидкості зі зворотними зв'язками, що перемикаються Завдання 1. Виконати порівняльний аналіз статичних та динамічних властивостей а) двоконтурних і б) одноконтурних систем непрямого регулювання швидкості у режимах пуску, прикладання статичного моменту та гальмування під дією реактивного навантаження, перевищуючого рівень струмообмеження. 2. Навести сімейства ЛАЧХ розімкненого ланцюга системи та перехідні функції замкненого зовнішнього контуру з різними значеннями коефіцієнта підсилення регулятора напруги. 3. Вивести вирази для статичного падіння швидкості під дією навантаження і порівняти їх з результатами математичного моделювання. 4. Виконати варіацію електромеханічної сталої часу привода у бік підвищення та зниження удвічі. Оцінити чутливість систем до зміни якірного опору під впливом температури та до можливих помилок при формуванні сигналів зворотних зв'язків. 5. Відносні значення активних опорів та індуктивностей частини якірного кола ТП-Д, з якого знімається сигнал зворотного зв'язку за напругою і яка примикає до двигуна:
наведені у табл.2.1.
Таблиця 2.1 – Варіанти завдань
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 291; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.221.252 (0.008 с.) |

 (2.4)
(2.4) (2.5)
(2.5) (2.6)
(2.6) (2.7)
(2.7)