
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Структурні схеми за датчиків інтенсивностіСодержание книги Поиск на нашем сайте
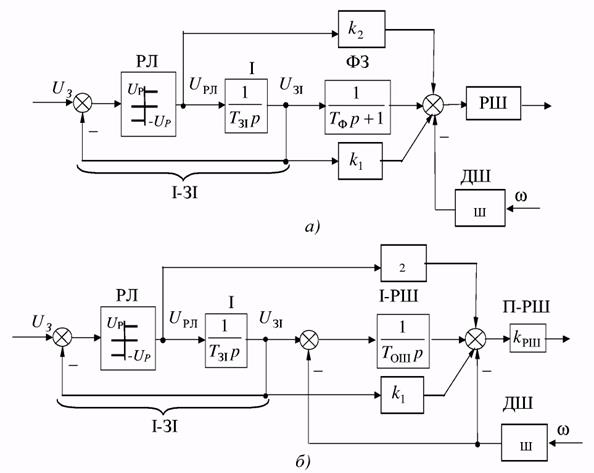
Швидкодію систем у пуско-гальмувальних режимах можна підвищити застосуванням принципу комбінованого управління за керуючою дією. Він здійснюється за допомогою задатчиків інтенсивності з паралельними зв'язками за похідною від його вихідного сигналу. Структурні схеми таких ЗІ зображені на рис. Б.1, а у системі з ПІ -регулятором швидкості, та на рис. Б.1, б – у системі зі складеним регулятором швидкості. Оскільки ці задатчики доповнюють ФП замкненої системи форсуючою ланкою другого порядку, то їх називають іноді пропорційно-інтегрально-диференціальними (ПІД-ЗІ) на відміну від звичайних інтегруючих (І-ЗІ) без паралельних зв'язків.
Рисунок Б.1 – Структурні схеми за датчиків інтенсивності На схемах позначені: РЛ – релейна ланка (ланка з ідеальною релейною характеристикою); І – інтегратор; ФЗ – фільтр в каналі завдання; UЗ – завдання на усталене значення швидкості обертання двигуна; UЗІ – вихідний сигнал інтегрального ЗІ, що завдає бажаний закон зміни швидкості на виході системи. Параметри коректуючих зв'язків k1 та k1 обирають з умов «модульного оптимуму».
ДОДАТОК В Системи регулювання швидкості з обмеженням ривка В.1 Загальні відомості
Системи регулювання швидкості з обмеженням ривка ρ застосовують у приводах установок, що здійснюють перевезення людей, а також при наявності у електромеханічний системі пружних елементів та зазорів. У першому випадку це зумовлено бажанням забезпечити комфортність пасажирів, а у другому – необхідністю зменшення пружних моментів. Досить часто обмежують не ривок, а першу похідну струму якоря dI / dt, бо ця величина при відсутності статичного моменту на валу двигуна пропорційна ривку. Для вирішення сформульованої вище задачі можна запропонувати наступні засоби: 1) використання на вході контуру швидкості не I-, а I2-задавача інтенсивності (ЗІ); 2) використання I-задавача інтенсивності на вході контуру струму (ЗІС); 3) використання I-задавачів інтенсивності на вході контурів струму (ЗІС) та швидкості (ЗІШ); 4) обмеження вхідного сигналу регулятора струму (не контуру, а саме регулятора, тобто вихідного сигналу елемента зрівняння завдання на струм i дійсного струму).
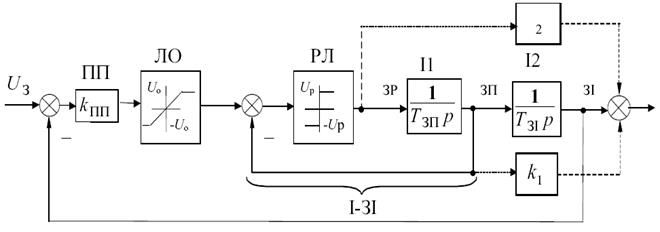
На рис.В.1 зображена структурна схема І2-задавача інтенсивності. Він складається з пропорційного підсилювача ПП, ланки обмеження ЛО, ланки з ідеальною релейною характеристикою РЛ та двох інтеграторів І1, І2. За допомогою негативних зворотних зв’язків утворюються два контури, внутрішній з яких уявляє собою звичайний І-ЗІ.
Рисунок В.1 – Структурна схема І2-задавача інтенсивності
Наведений І2-ЗІ формує сигнали завдання на швидкість UЗІ = kШω (ω – швидкість обертання двигуна, kШ – коефіцієнт зворотного зв’язку за швидкістю), прискорення UЗП та ривок UЗР, які повинні змінюватись за графіками, зображеними на рис.В.2, де позначено: tзр – час зростання прискорення; tсп – час спадання прискорення; tу – час зміни швидкості з усталеним прискоренням; Δω – зміна швидкості при роботі системи з усталеним прискоренням. Параметри ЗІ обираються з умов:
де ε0 – обмеження на прискорення; ρ0 – обмеження на ривок.
Рисунок В.2 – Діаграми зміни вихідних сигналів І2- ЗІ
Для більш точного відпрацювання системою керуючої дії І2-ЗІ може доповнюватися паралельними корегуючими зв’язками за першою та другою похідними від вихідного сигналу, що показані на рис.В.1 пунктирами. Коефіцієнти передачі цих зв’язків обираються здебільш з умов “модульного оптимуму”. Системи з І2-ЗІ обмежують ривок тільки у пускогальмувальних режимах. Інші варіанти обмежують dI/dt як у пуско-гальмувальних режимах, так і при накиді навантаження. При наявності І-ЗІ на вході контуру струму його параметри обираються з рівняння
а коефіцієнт підсилення регулятора швидкості kРШ розраховується не з умов компенсації “великої” сталої часу контуру, а з умови забезпечення спадання прискорення за лінійним законом без перерегулювання та дотягування. Якщо знехтувати інерційністю контуру струму, то для цього треба задовольнити рівнянню
У формулах (В.4), (В.5) позначені: Ij0, kС – коефіцієнт зворотного зв’язку за струмом; JΣ – сумарний момент інерції привода. З урахуванням інерційності контуру струму коефіцієнт підсилення регулятора швидкості, знайдений з виразу (В.5), треба дещо зменшити.
В.2 Завдання
Порівняти якість перехідних процесів у системах регулювання швидкості з різними засобами обмеження ривка у режимах пуску, прикладення статичного моменту та гальмування під дією реактивного навантаження, перевищуючого рівень струмообмеження. Оцінити ефективність використання паралельних корегуючих зв’язків у системі з І2-задавачем інтенсивності. Типи регуляторів струму РС і швидкості РШ та деякі чисельні данні наведені у табл.В.1.
Таблиця В.1 – Варіанти завдань
|
||||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 480; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.218.93.14 (0.006 с.) |

 (В.1)
(В.1) (В.2)
(В.2) (В.3)
(В.3)
 (В.4)
(В.4) (В.5)
(В.5) – обмеження на динамічний струм та його першу похідну;
– обмеження на динамічний струм та його першу похідну;



