Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Метод потенциалов решения транспортных задачСодержание книги Поиск на нашем сайте Соотношения определяют систему из m+n-1 линейных уравнений с m+n известными, имеющую бесчисленное множество решений; для её определённости одному неизвестному присваивают произвольное значение (обычно альфа равное 0), тогда все остальные неизвестные определяются однозначно. Критерий оптимальности Если известны потенциалы решения Х0 транспортной задачи и для всех незаполненных ячеек выполняются условия αi+βj≤ Cij, то Х0 является оптимальным планом транспортной задачи. Если план не оптимален, то необходимо перейти к следующему плану (таблице) так, чтобы транспортные расходы не увеличивались. Цикл перерасчёта таблицы – это последовательность ячеек, удовлетворяющая условиям: 1. Одна ячейка пустая, все остальные занятые. 2. Любые две соседние ячейки находятся в одной строке или в одном столбце. 3. Никакие три соседние ячейки не могут быть в одной строке или в одном столбце. Пустой ячейке присваивают знак "+", остальным – поочерёдно знаки "–" и "+". Для перераспределения плана перевозок с помощью цикла перерасчёта сначала находят незаполненную ячейку (r, s), в которой αr+βs > Crs, и строят соответствующий цикл; затем в минусовых клетках находят число X = min(Xij). Далее составляют новую таблицу по следующему правилу: 4. В плюсовых клетках добавляем Х. 5. Из минусовых клеток вычитаем Х. 6. Все остальные клетки вне цикла остаются без изменения. Получим новую таблицу, дающую новое решение Х, такое, что F (X1) ≤ F (X0); оно снова проверяется на оптимальность через конечное число шагов, обязательно найдем оптимальный план транспортной задачи, ибо он всегда существует. Найдём оптимальный план для рассмотренной выше задачи. В качестве опорного плана возьмем план, полученный с помощью метода "минимального элемента" Х11= 3, Х12= 12, Х21= 2, Х24= 8, Х25= 15, Х31= 15, Х33= 5. Все остальные элементы равны 0. Составим систему уравнений для нахождения потенциалов решения, найдем сумму соответствующих потенциалов для каждой свободной ячейки и пересчитаем тарифы (стоимости) для каждой свободной ячейки. Так как у нас получились отрицательные значения, то полученный план не является оптимальным. Выберем ячейку для пересчета A2B2. Получим: X = min(2, 12) = 2 Строим следующую транспортную таблицу. Проверим полученный план на оптимальность. Теперь ячейка A1B2 не заполнена. Построенный план не является оптимальным, следовательно, производим пересчет. Выберем ячейку A3B5. X = min(15, 10, 15) = 10 Строим следующую транспортную таблицу. Проверим построенный план на оптимальность. Полученный план является оптимальным. Х11= 15, Х22= 12, Х24= 8, Х25= 5, Х31= 5, Х33= 5, Х35= 10. Все остальные Хij= 0. F = 1*15+1*12+3*8+3*5+4*5+1*5+3*10 = 121
1. Задачи нелинейного программирования с линейной целевой функцией и нелинейными ограничениями. Чтобы проиллюстрировать более наглядно различие между линейными и нелинейными задачами, ограничимся решением задачи с двумя переменными, так как решение таких задач может быть представлено графически.
17. Задачи нелинейного программирования с линейной целевой функцией и нелинейными ограничениями
ограничения qi(x) либо целевая функция Z(X) либо то и другое нелинейны.
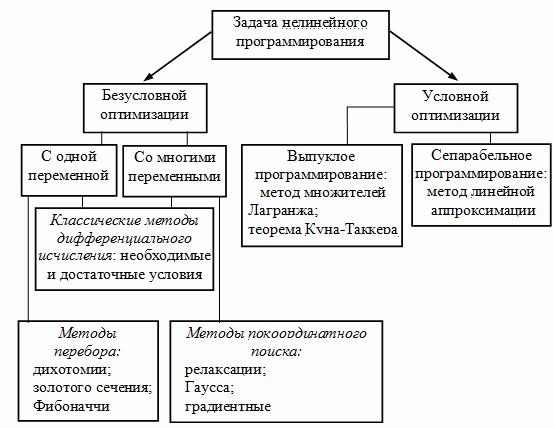
Рисунок - Классификация задач и методов нелинейного программирования Большинство существующих методов в нелинейном программировании можно разделить на два больших класса:
Нелинейное программирование Прямые методы Метод множителей Лагранжа. В задачах 301-320 используя метод множителей Лагранжа найти точки экстремума функции z=f(x,y) при заданном условии: z=xy+7x, 2x+y=1
|
||||||||||
|
|
Последнее изменение этой страницы: 2016-08-14; просмотров: 282; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.01 с.) |


 ;
;