
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Механiка — роздiл фiзики, в якому вивчається найпростiша форма руху матерії — механiчний рух, тобто змiна положення одних тiл чи частин тiла вiдносно iнших.Содержание книги
Поиск на нашем сайте ФІЗИКА Методичні рекомендації до вивчення курсу фізики. “Механіка” модуль І-ІІ. Для студентів спеціальностей: 6.091902- “Механізація сільського господарства”, 6.010100- “Професійне навчання”, 6.130200- “Технологія виробництва та переробки продукції тваринництва”, 6.091900-“Енергетика сільськогосподарського виробництва”, 6.130102-“Агрономія”.
Миколаїв 2006 р.
Удк У методичних рекомендаціях викладено повний лекційний курс з дисципліни фізики з розділу “Механіка матеріальної точки та твердого тіла”, а також наведено тестові запитання, що пропонуються використовувати для контролю знань студентів.
Укладачі: Старший викладач Вахоніна Л.В.,асистент Краснянський С.В.,старший лаборант Власенко Л.С.
Рецензенти: Івашина Ю.К., доц.,к.ф.-м.н., зав. кафедрою “Фізики та методики”, ХДУ. Горбенко О.А., доц. к.т.н., МДАУ
Відповідальний за випуск Пастушенко С.І., д.т.н., професор, декан факультету механізації сільського господарства МДАУ
Друкується згідно з рішенням методичної ради МДАУ.(протокол № 5 від 1.02.2006р.)
Надруковано у видавничому центрі МДАУ. Зам. Наклад 150 прим. 54010, Миколаїв, вул. Паризької комуни, 9
Зміст
Вступ Механiка — роздiл фiзики, в якому вивчається найпростiша форма руху матерії — механiчний рух, тобто змiна положення одних тiл чи частин тiла вiдносно iнших. Слово “ механiка ” в перекладi з грецької мови означає мистецтво створювати машини. Це одна з найстародавнiших наук, розвиток якої нерозривно пов’язаний з практичною дiяльнiстю людини. Авторами перших трактатiв з механiки були Арiстотель (IV ст. до н.е.) та Архімед (III ст. до н.е.). Подальшого розвитку ця наука отримала в працях Леонардо да Вiнчi, Галiлео Галiлея та iн. Завершилося створення основ механiки нарисом І.Ньютона „Математичнi початки натуральної філософії” (1687 р.). З подальшим розвитком фiзики з’ясувалося, що залежно вiд швидкостi руху і масштабiв тiл підходи до вивчення механiчних закономiрностей можуть бути зовсiм рiзними. Тому на сучасному етапi розрiзняють три напрямки механiки: класичну механiку (або механiку Ньютона), релятивiстську механiку (або теорiю вiдносностi Енштейна) та квантову механiку. Всi вони вивчають механiчний рух тiл, але мають певнi межi застосування. Рух макроскопiчних тiл iз швидкостями, невеликими порiвнянно з швидкiстю свiтла, вивчає класична механiка; рух тiл, швидкостi яких близькi до швидкостi свiтла, розглядає релятивiстська механiка; вивченню руху мiкрочастинок присвячена квантова механiка. У даному випуску розглядаються класична та релятивiстська механiки. Для описування механiчних явищ i встановлення законiв механiки зручно користуватися iдеалiзованими моделями реальних тiл: матерiальною точкою i абсолютно твердим тiлом. Матеріальною точкою (МТ) називають тiло, геометричними розмiрами якого в умовах конкретної задачi можна знехтувати. Абсолютно твердим тiлом (АТТ) називають тiло, у якого вiдстань мiж будь-якими двома точками нiколи не змiнюється. Іншими словами, це тіло, деформацією якого можна знехтувати. Основна задача механіки- визначення положення тіла в будь який момент часу.
КIНЕМАТИКА Кiнематика — роздiл механiки, в якому вивчається рух тiл, не встановлюючи причин, що викликали цей рух. Сам термiн походить вiд грецького слова „кiнета”, що означає рух. За законами i залежностями, встановленими в кiнематицi, визначаються параметри польоту лiтальних апаратiв, виконуються розрахунки передач рухiв у рiзних авiацiйних механiзмах та iн. 1.1. Механiчний рух. Система вiдлiку Механiчним рухом називається змiна положення тiла в просторi вiдносно iнших тiл. Це все свідчить, що механiчний рух є вiдносним. Дiйсно, будь-яке тiло може бути нерухомим вiдносно одних тiл i рухається вiдносно iнших. Разом з тим цей рух є абсолютним, оскiльки завжди можна вказати, таке тiло, вiдносно якого дане „нерухоме” тiло рухається, тобто абсолютно нерухомих тiл в природi не iснує. Отже, починаючи дослiджувати рух якогось тiла, слід визначити, вiдносно якого iншого тiла вiн буде розглядатися. Тiло, вiдносно якого розглядається рух, називається тiлом вiдлiку. Для математичного описування руху з тiлом вiдлiку необхiдно зв’язати систему координат. Як вiдомо, iснує багато рiзних систем координат (полярна, цилiндрична, сферична та iн.). Найбiльш поширеною є прямокутна декартова система координат. Слiд звернути увагу, що iснують два види декартових систем: права (рис. 1.1) та лiва (рис.1.2), якi розрiзняють за допомогою правила гвинта: якщо обертати ручку гвинта вiд додатнього кiнця осi ОХ до додатнього кiнця осi ОУ, то в правiй системi координат гвинт буде поступально рухатись у додатньому напрямку осi ОZ, а в лiвiй системi — у вiд’ємному напрямку. У фiзицi здебiльшого застосовується права система. Перемiщення тiл вiдбувається з плином часу, тому для описування руху слід мати також годинник. Тiло вiдлiку, повязана з ним система координат та годинник становлять систему вiдлiку.
1.2. Способи описування руху матерiальноiї точки. Основна (пряма) задача кінематик Важливо зазначити, що в класичнiй механiцi загальновизначеною є концепцiя простору i часу, розроблена Ньютоном. Вiдповiдно до цiєї концепцiї простiр i час розглядаються як такi, що не пов’язанi нi мiж собою, нi з рухом тiл. Iншими словами, в класичнiй механiцi простiр i час вважаються абсолютними та iснуючими не залежно один вiд одного. Тому i хiд годинникiв (тобто плин часу) не залежить вiд системи вiдлiку i всюди є однаковим. Розглянемо спочатку рух найпростiшого об’єкту — матерiальної точки. Визначимо деякi поняття, якi використовують пiд час описування цього руху.
Траєкторiя — це уявна лiнiя, вздовж якої рухається матеріальна точка (рис. 1.3). Шлях (∆S або S) — це довжина траєкторiї (рис. 1.3). Шлях — величина скалярна, в системi СІ вимiрюється в метрах (м). Перемiщення ∆r — це найкоротша вiдстань мiж початковою i кiнцевою точками траєкторїi (рис. 1.4). Перемiщення — величина векторна, має напрямок вiд початковоїi до кiнцевої точки траєкторiї; в системi СІ вимiрюється в метрах.
Радiус-вектор може бути записаний через його проекцiї
та за модулем:
де
де
, (1.3)
У фізиці прийнято модуль будь-якого вектора Зрозумiло, що пiд час руху матерiальної точки‚ її радіус-вектор, шлях та координати з часом змiнюються. Вiдповiдно до цього в кiнематицi використовуються три способи описування руху: — векторний, коли вiдоме рiвняння залежностi радіус-вектора точки вiд часу:
— траєкторний, коли вiдоме рiвняння руху точки вздовж траєкторії:
— координатний, коли вiдомi рiвняння руху точки в декартових координатах: х = х(t), у =у(t), z=z(t). (1.7) Рiвняння (1.5), (1.6), (1.7) називаються кінематичними рiвняннями руху. Основна (пряма) задача кiнематики полягає в тому, щоб за кiнематичними рiвняннями руху знайти положення матеріальної точки в просторi i кiнематичнi характеристики руху в будь-який момент часу. 1.3. Кiнематичнi характеристики поступального руху матерiальної точки До кiнематичних характеристик поступального руху вiдносяться: перемiщення, швидкiсть та прискорення. Перемiщення Нехай у момент часу t матерiальна точка пребувала в положеннi 1, а за деякий промiжок часу ∆t — в положеннi 2 (рис. 1.6,а). Проведемо радiус-вектори
тобто вектор перемiщення являє собою змiну (прирiст) радіуса-вектора за часом. З урахуванням (1.3) вектор ∆ r можна записати через прирiст координат матерiальної точки (∆х, ∆у, ∆z) за час ∆t:
а його модуль як
Як видно з рис. (1.6,б) вектор перемiщення збiгається з хордою, що стягує вiдповiдну дiлянку траєкторії. Тому завжди, крiм прямолiнiйного руху, модуль вектора перемiщення менший, нiж шлях, пройдений за той же промiжок часу:
Тепер будемо зменшувати промiжок часу ∆t до достатньо малого значення, яке назвемо елементарним i позначимо dt. При цьому вiдбудеться також мале перемiщення, яке називатиметься відповiдно елементарним перемiщенням d dr = dS (1.12) За напрямком d
Швидкість Розрiзняють швидкiсть середню i миттєву. Середньою швидкiстю перемiщення (
Вектор Будемо нескiнченно зменшувати промiжок часу, направляючи його до нуля ( Ця границя i визначає швидкiсть руху в даному мiсцi траєкторiї в даний момент часу, тобто миттєву швидкiсть (при цьому точки 1 i 2 на рис. 1.7,а будуть нескiнченно наближатися одна до одної).
Враховуючи (1.12) одержимо:
Прискорення Прискоренням називається фiзична величина, що характеризує змiну швидкостi з часом. Розрiзняють прискорення середнє i миттєве. Середнє прискорення (
Напрямок вектора Миттєве прискорення (або просто прискорення)
Використовуючи рівність (1.16) маємо,
Прискорення є векторна величина, що дорівнює похiднiй вектора швидкості за часом. З урахуванням формули (1.16) прискорення можна записати як другу похiдну радіус-вектора за часом:
Повне прискорення дорівнює їх векторнiй сумi
Для знаходження цих складових прискорення, пiдставимо вираз для швидкостi в означення (1.18) i зробимо вiдповiдне диференцiювання:
Враховуючи, що
Матимемо вираз:
Можна показати, що
де Остаточно вираз (1.21) набуде вигляду:
Порiвнюючи цей вираз з рiвнянням (1.20) бачимо, що перший член виразу визначає тангенцiальне прискорення
що спрямоване по дотичнiй до траєкторiї в данiй точцi i за модулем дорівнює
Другий член визначає нормальне прискорення
що спрямоване по нормалi до траєкторії в данiй точцi (тобто до центру кривизни траєкторiї) i за модулем дорівнює
Як видно з рис.1.9, модуль повного прискорення
Цi проекцiї знаходяться як похiднi за часом:
Обернена задача кiнематики Обернена задача кiнематики полягає в знаходженнi рiвняння руху за вiдомими характеристиками руху. Розглянемо, як за вiдомими
Щоб знайти весь шлях, пройдений за певний промiжок часу
Графiчно цей iнтеграл зображений на рис. 1.10, з якого видно, що шлях чисельно дорiвнює площi фiгури (криволiнiйної трапеції), що обмежена кривою Аналогiчно за вiдомим прискоренням можна знайти швидкiсть у довiльний момент часу
Якщо в початковий момент часу
Застосуємо наведенi вирази для рiвнозмiнного прямолiнiйного руху при
З виразу (1.33) можна одержати:
Остаточно:
Знайшовши
Кут повороту Положення матерiальної точки пiд час руху по колу можна визначити кутом повороту
Із геометрiї вiдомий зв’язок мiж довжиною дуги та кутом повороту:
де R— радiус кола. Для малих промiжкiв часу
де Кутова швидкiсть Аналогiчно до означень, наведених в п. 1.3.2, розрiзняють середню і миттєву кутові швидкостi. Середня кутова швидкiсть (
Для миттєвої кутової швидкостi (або просто кутової швидкості) можна записати:
тобто чисельно вона дорiвнює похiднiй кута повороту за часом. Вимiрюється кутова швидкiсть у радiанах за секунду (рад/с). Вона теж є псевдовектором, що напрямлений вздовж осi обертання, вiдповiдно до правила гвинта (рис. 1.11). Тому можна записати у векторному виглядi:
Якщо з часом кутова швидкiсть не змiнюється, тобто
У цьому разі
звідки
Величина, обернена до перiоду, називається частотою обертання
Вона показує, скiльки обертiв по колу робить точка за одиницю часу i вимiрюється в секунду мінус першій ступені (с-1) або в герцах (Гц). Зв’язок мiж частотою i кутовою частотою має такий вигляд:
Кутове прискорення Кутове прискорення характеризує змiну кутової швидкостi за часом. Аналогiчно до означень, наведених в п. 1.3.3, розрiзняють середнє i миттєве кутове прискорення. Середнє кутове прискорення (
Для миттєвого кутового прискорення (або просто кутового прискорення)
Тобто воно чисельно дорiвнює першiй похiднiй кутової швидкості за часом або другiй похiднiй кута повороту за часом. Вимiрюється кутове прискорення в радiанах на секунду в квадратi (рад/с2). Воно також є псевдовектором, спрямованим по осi обертання
На рис.1.11, в напрямок Знайдемо зв’язок мiж лiнiйними i кутовими характеристиками руху. 1. Зв’язок мiж лiнiйною i кутовою швидкiстю:
тобто
2. Зв’язок мiж тангенцiальним i кутовим прискоренням:
тобто
3. Зв’язок між нормальним прискоренням і кутовою швидкістю:
тобто
Для розв’язання оберненої задачi під час руху точки по колу використовують вирази аналогiчнi виразам (1.33) та (1.35):
Тодi для рiвнозмiнного руху по колу вiдповiднi математичнi перетворення дадуть вирази аналогiчнi виразам (1.36), (1.37),(1.38):
де
ДІНАМIКА Розглянемо основнi закони динамiки — тiєї частини класичної механiки, що вивчає причини виникнення i змiни руху тiл. Для цього, перш за все, слід ввести динамiчнi характеристики руху. Будемо дотримуватися тiєї ж послiдовностi, що i в кiнематицi: спочатку розглянемо поступальний рух, а потiм — обертальний. У кiнцi розділу розглянемо питання пов’язанi з енергiєю i роботою в механiцi. Маса Iмпульс Iмпульсом або кiлькiстю руху тiла
З означення випливає, що напрямок вектора
Закони Ньютона Закони Ньютона з узагальненням дослiдних фактiв i виступають у ролi постулатiв класичної механiки. Вони вiдносяться до поступального руху. Перший закон Ньютона (закон iнерцiї): тiло (матерiальна точка), яке вiльне вiд зовнiшнiх впливiв, рухається прямолiнiйно i рiвномірно або перебуває в станi спокою. Тiло, вiльне вiд зовнiшнiх впливiв, називається вiльним, а його рух — вiльним рухом або рухом за iнерцiєю. Зауважимо, що вiльне тiло — фiзична абстракцiя, проте можна створити умови, за яких зовнiшнi впливи компенсують один одного або, по можливостi, усуненi. На практицi це означає, що рiвнодiйна всiх сил, що дiють на тiло, має бути рiвною нулю. Другий закон Ньютона (основний закон динамiки поступального руху): прискорення тiла (матерiальної точки) прямо пропорцiйне дiючiй на тiло силi, збiгається з нею за напрямком i обернено пропорцiйне масi тiла (матерiальної точки):
Звідси
або, з урахуванням означення прискорення,
Через проекції на осi координат рiвняння (2.9) буде:
Рiвняння (2.10) називаються динамiчними рiвняннями руху тіл (матерiальної точки). Якщо на тiло дiє кiлька сил, то кожна з них надає тiлу такого прискорення, ніби iнших сил немає. В цьому полягає принцип незалежностi дiї сил. Результат дiї цих сил аналогiчний результату дiї їх рiвнодiйної:
Запишемо вираз (2.8) в iншiй формi. Врахуємо, що
Оскiльки
тобто швидкiсть змiни iмпульсу тiла (матерiальної точки) дорiвнює дiючiй силi (iнше формулювання другого закону Ньютона). З останнього рiвняння виходить такий запис:
Добуток Третiй закон Ньютона: два тіла (матерiальнi точки) діють одне на одне з силами, рiвними за модулем i протилежно напрямленими вздовж прямої, що з’єднує ці тіла (матерiальнi точки). Або, за формулюванням Ньютона: „Дії завжди є рiвна i протилежна протидiя”. Це виражається рівнянням:
Звернемо увагу, що сили Обговоримо наведенi закони докладнiше. Перший закон Ньютона приводить до роздiлення всiх систем вiдлiку на iнерцiальнi та неiнерцiальнi. Справа в тому, що в кiнематицi вибiр системи вiдлiку не був суттєвим i диктувався тiльки математичними зручностями. В динамiцi це питання розглядається iнакше. Дiйсно, якщо в деякiй системi вiдлiку тiло рухається прямолiнiйно i рiвномiрно, то в системi вiдлiку, що сама рухається вiдносно першої системи прискорено, рух цього тiла стає прискореним, хоча не з’явилося нiяких дiючих сил. Це означає, що динамiчне описування одного й того ж руху в рiзних системах вiдлiку здійснюється по-рiзному, i перший закон Ныотона в одних системах вiдлiку виконується, а в iнших — нi. Тому з цієї точки зору всi системи в механiцi подiляються на iнерцiальнi й неiнерцiальнi. Системи вiдлiку, в яких всi вiльнi тiла рухаються прямолiнiйно i рiвномiрно, називаються iнерцiальними. Системи вiдлiку, що знаходяться в станi спокою або рухаються прямолiнiйно i рiвномiрно вiдносно iнерцiальної системи, теж є iнерцiальними. Системи вiдлiку, якi не задовольняють дані умови, називаються неiнерцiальними. Закони Ньютона виконуються тiльки в iнерцiальних системах. Прикладом iнерцальної системи вiдлiку може бути гелiоцентрична система, початок якої розмiщено в центрi Сонця, а координатнi осi напрямленi на три вiддаленi зiрки. Система вiдлiку, що зв’язана з Землею (геоцентрична система), є неiнерцiальною, оскiльки Земля обертається навколо власної осi i навколо Сонця. тобто рухається прискорено вiдносно гелiоцентричної системи. Однак часто цi обертання можна вважати повiльними i ними знехтувати, розглядаючи Землю як iнерцiальну систему вiдлiку. Другий i третiй закони Ньютона дозволяють розглядати рух не тiльки окремих тiл (матерiальних точок), але й механiчних систем. Нагадаємо, що сили, що дiють у механiчнiй системi, подiляються на зовнiшнi та внутрiшнi. Вочевидь, що за третiм законом Ньютона, векторна сума всiх внутрiшнiх сил механiчної системи завжди дорiвнює нулю:
де
де
Таким чином, швидкiсть змiни iмпульсу механiчної системи дорiвнює головному вектору зовнiшнiх сил, що дiють на систему. Пружна сила — виникає при пружних деформацiях i визначається законом Гука:
де k — коефiцiєнт пружностi, х — деформацiя тiла чи системи. Знак ”-” показує, що пружна сила спрямована протилежно напрямку деформації.
Момент сили Моментом сили
Визначення моменту сили дано так, щоб кутове прискорення i кутова швидкiсть, якi виникають внаслiдок дiї моменту сили, збiгалися за напрямком з цим моментом. Тобто вектор Модуль моменту сили дорiвнює:
де Якщо на тiло дiє кiлька сил, можна знайти суму моментiв цих сил відносно точки обертання О. Ця сума називається головним моментом зовнiшнiх сил вiдносно точки обертання О:
Моментом сили вiдносно осi обертання z називають проекцiю вектора |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 397; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.136 (0.011 с.) |



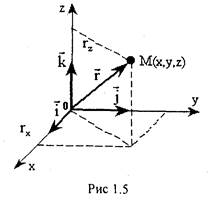 У декартовiй системi координат положення матерiальної точки М може бути задане не тiльки трьома координатами (х, у, z), а й за допомогою радiуса-вектора. Радiус — вектором
У декартовiй системi координат положення матерiальної точки М може бути задане не тiльки трьома координатами (х, у, z), а й за допомогою радiуса-вектора. Радiус — вектором  точки називається вектор, який проведено з початку координат у дану точку (рис. 1.5).
точки називається вектор, який проведено з початку координат у дану точку (рис. 1.5). на вiдповiднi координатнi осi:
на вiдповiднi координатнi осi: (1.1)
(1.1) , (1.2)
, (1.2) - одиничні вектори (орти) відповідних осей координат:
- одиничні вектори (орти) відповідних осей координат:

 Оскільки
Оскільки  формули (1.1) і (1.2) можуть бути записані ще й так:
формули (1.1) і (1.2) можуть бути записані ще й так: . (1.4)
. (1.4) позначати а.
позначати а. (1.5)
(1.5) (1.6)
(1.6) і
і  в точки 1 i 2. Тодi вектор перемiщення визначиться як
в точки 1 i 2. Тодi вектор перемiщення визначиться як (1.8)
(1.8) (1.9)
(1.9) (1.10)
(1.10)
 (1.11)
(1.11) i матерiальна точка пройде досить малий, тобто елементарний шлях d S. Ясно, що iз зменшенням ∆t значення ∆r буде все бiльше наближатися до ∆S. Тобто при (
i матерiальна точка пройде досить малий, тобто елементарний шлях d S. Ясно, що iз зменшенням ∆t значення ∆r буде все бiльше наближатися до ∆S. Тобто при ( ) можна вважати, що
) можна вважати, що , тодi у векторному виглядi можна записати (при
, тодi у векторному виглядi можна записати (при  ):
):
 ) за промiжок часу ∆t називається векторна величина, що дорiвнює вiдношенню вектора перемiщення до цього промiжку часу:
) за промiжок часу ∆t називається векторна величина, що дорiвнює вiдношенню вектора перемiщення до цього промiжку часу: (1.13)
(1.13)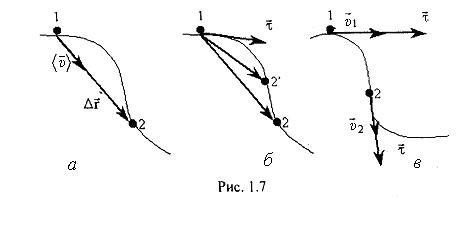
 спрямований так, як i вектор
спрямований так, як i вектор  (рис. 1.7,а).
(рис. 1.7,а). перестає змiнюватися. Тобто iснує певна границя, до якої прямує вiдношення
перестає змiнюватися. Тобто iснує певна границя, до якої прямує вiдношення  .
. (1.14)
(1.14) (1.15)
(1.15) )— це векторна величина, що визначається вiдношенням змiни швидкостi
)— це векторна величина, що визначається вiдношенням змiни швидкостi  до промiжку часу
до промiжку часу  , за який ця змiна вiдбулася:
, за який ця змiна вiдбулася: (1.16)
(1.16) збігається з напрямком
збігається з напрямком  , тобто прискорення в певний момент часу це границя, до якої прямує середнє прискорення при
, тобто прискорення в певний момент часу це границя, до якої прямує середнє прискорення при 
 (1.17)
(1.17) (1.18)
(1.18) (1.19)
(1.19)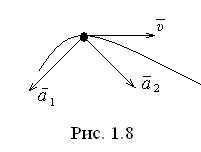 Як буде показано далi, в загалом вектор
Як буде показано далi, в загалом вектор  в бiк угнутостi траєкторiї. На рис. 1.8. вектор
в бiк угнутостi траєкторiї. На рис. 1.8. вектор  вiдповідає прискореному руху, вектор
вiдповідає прискореному руху, вектор  —сповiльненому руху. Оскiльки змiна швидкостi вiдбувається i за модулем i за на напрямком, розрiзняють двi складовi прискорення:
—сповiльненому руху. Оскiльки змiна швидкостi вiдбувається i за модулем i за на напрямком, розрiзняють двi складовi прискорення: - прискорення (дотичне), яке характеризує змiну швидкості за модулем i спрямоване по дотичнiй до траєкторії;
- прискорення (дотичне), яке характеризує змiну швидкості за модулем i спрямоване по дотичнiй до траєкторії; - нормальне прискорення (доцентрове), яке характеризує змiну швидкості за напрямком i спрямоване по нормалi до траєкторії.
- нормальне прискорення (доцентрове), яке характеризує змiну швидкості за напрямком i спрямоване по нормалi до траєкторії. (1.20)
(1.20)

 , а
, а  можна подати у виглядi:
можна подати у виглядi:
 (1.21)
(1.21) , (1.22)
, (1.22) - орт нормалі, R – радіус кривизни траєкторії в даній точці.
- орт нормалі, R – радіус кривизни траєкторії в даній точці. (1.23)
(1.23) (1.24)
(1.24) .
.  , (1.26)
, (1.26) (1.27)
(1.27) (1.28)
(1.28) Аналогiчно до того, як записувався вектор швидкостi, вектор прискорення теж можна подати через проекцiї
Аналогiчно до того, як записувався вектор швидкостi, вектор прискорення теж можна подати через проекцiї  на координатнi осi:
на координатнi осi: (1.29)
(1.29) (1.30)
(1.30)
 (1.31)
(1.31) можна знайти рiвняння руху в траєкторному виглядi
можна знайти рiвняння руху в траєкторному виглядi  . Запишемо з виразу (1.12) елементарний шлях, пройдений за час
. Запишемо з виразу (1.12) елементарний шлях, пройдений за час  :
: (1.32)
(1.32) , слід проiнтегрувати цей вираз:
, слід проiнтегрувати цей вираз: (1.33)
(1.33) .
. :
: (1.34)
(1.34) , тiло мало початкову швидкiсть
, тiло мало початкову швидкiсть  , то
, то (1.35)
(1.35)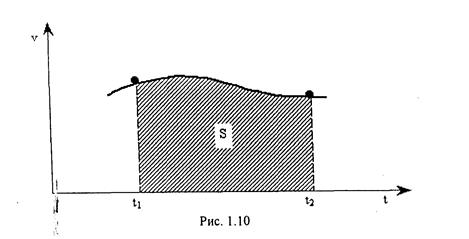
 . Тодi рiвняння (1.35) перепишеться:
. Тодi рiвняння (1.35) перепишеться: (1.36)
(1.36)
 (1.37)
(1.37) з виразу (1.36) i пiдставивши його у вираз (1.37), можна одержати рiвняння, яке часто зручно використовувати в задачах:
з виразу (1.36) i пiдставивши його у вираз (1.37), можна одержати рiвняння, яке часто зручно використовувати в задачах: (1.38)
(1.38) . Як видно з рис. 1.11,а, кут повороту з центральним кутом, який вiдповiдає дузi
. Як видно з рис. 1.11,а, кут повороту з центральним кутом, який вiдповiдає дузi  , описанiй матерiальною точкою за час
, описанiй матерiальною точкою за час  , а при N обертах:
, а при N обертах: (1.39)
(1.39) (1.40)
(1.40) цей вираз матиме вигляд:
цей вираз матиме вигляд: (1.41)
(1.41) - елементарний кут повороту. Для того, щоб показати i напрямок руху точки по колу, домовились елементарний кут повороту показувати як вектор
- елементарний кут повороту. Для того, щоб показати i напрямок руху точки по колу, домовились елементарний кут повороту показувати як вектор  ) визначається вiдношенням кута повороту
) визначається вiдношенням кута повороту  (1.42)
(1.42) (1.43)
(1.43) (1.44)
(1.44)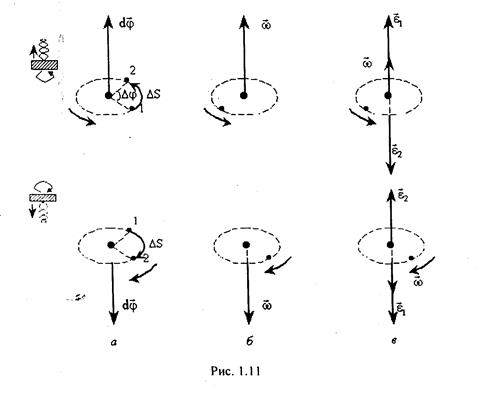
 , рух по колу називається рiвномiрним, для нього
, рух по колу називається рiвномiрним, для нього (1. 45)
(1. 45) називають циклічною частотою обертання. Час, за який матерiальна точка проходить один оберт по колу, називається перiодом обертання Т, який вимiрюється в секундах. Вираз (1.45) дає:
називають циклічною частотою обертання. Час, за який матерiальна точка проходить один оберт по колу, називається перiодом обертання Т, який вимiрюється в секундах. Вираз (1.45) дає: (1.46)
(1.46)
 :
: (1.47)
(1.47) (1.48)
(1.48) ) визначається вiдношенням змiни кутової швидкостi до вiдповiдного промiжку часу:
) визначається вiдношенням змiни кутової швидкостi до вiдповiдного промiжку часу: (1.49)
(1.49) можна записати:
можна записати: (1.50)
(1.50) (1.51)
(1.51) вiдповiдає прискореному руху по колу, напрямок
вiдповiдає прискореному руху по колу, напрямок  — сповiльненому руху по колу.
— сповiльненому руху по колу.
 (1.52)
(1.52)
 (1.53)
(1.53)
 (1.54)
(1.54) (1.55)
(1.55) (1. 56)
(1. 56) (1.57)
(1.57) (1.58)
(1.58) (1.59)
(1.59) — початкова кутова швидкiсть у момент часу t =0,
— початкова кутова швидкiсть у момент часу t =0,  — кутова швидкiсть у момент часу t.
— кутова швидкiсть у момент часу t. в класичнiй механiцi називається величина, що дорiвнює добутку маси тiла на його швидкість
в класичнiй механiцi називається величина, що дорiвнює добутку маси тiла на його швидкість (2.6)
(2.6) збiгається з напрямком вектора
збiгається з напрямком вектора  (2.7)
(2.7) (2.8)
(2.8) (2.9)
(2.9) (2.10)
(2.10) (2.11)
(2.11) , тоді
, тоді (2.12)
(2.12) , остаточно виходить
, остаточно виходить (2.13)
(2.13) (2.14)
(2.14) називасться імпульсом сили. Отже, рiвняння (2.14) означає, що імпульс сили дорівнює змiнi iмпульсу тіла (матеріальної точки).
називасться імпульсом сили. Отже, рiвняння (2.14) означає, що імпульс сили дорівнює змiнi iмпульсу тіла (матеріальної точки). (2.15)
(2.15) i
i  прикладенi до рiзних тiл, тому нiколи не врiвноважують одна одну (тобто рiвнодiйну для них визначати не можна).
прикладенi до рiзних тiл, тому нiколи не врiвноважують одна одну (тобто рiвнодiйну для них визначати не можна). (2.16)
(2.16) - сили, з якими взаємодiють попарно i -те та j -те тiла. Тодi для механiчної системи рiвняння (2.13) набуде вигляду:
- сили, з якими взаємодiють попарно i -те та j -те тiла. Тодi для механiчної системи рiвняння (2.13) набуде вигляду: (2.17)
(2.17) — iмпульс системи, що дорiвнює векторнiй сумi імпульсів всiх частин системи:
— iмпульс системи, що дорiвнює векторнiй сумi імпульсів всiх частин системи: (2,18)
(2,18) (2.19)
(2.19) . або обертальним моментом вiдносно точки обертання О називається векторний добуток радiус-вектора
. або обертальним моментом вiдносно точки обертання О називається векторний добуток радiус-вектора  , проведеного з точки О в точку прикладання сили, на цю силу
, проведеного з точки О в точку прикладання сили, на цю силу  :
: (2.20)
(2.20) (2.21)
(2.21)
 — кут мiж векторами
— кут мiж векторами  — перпендикуляр, проведений з точки О на лiнiю дiї сили
— перпендикуляр, проведений з точки О на лiнiю дiї сили 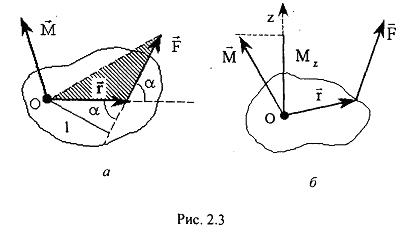
 (2.22)
(2.22)


