
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Момент инерции твердого телаСодержание книги
Поиск на нашем сайте
Выражая линейную скорость точки через угловую скорость тела и используя свойства векторного произведения, получим
Спроектируем момент импульса на ось вращения: — эта проекция определяет момент относительно этой оси. Получим
где zi,- координата i —точки вдоль оси Z, a Ri, — расстояние точки от оси вращения. Суммируя по всем частицам тела, получим момент импульса всего тела относительно оси вращения:
Величина
является моментом инерции тела относительно оси вращения. Момент импульса тела относительно данной оси вращения принимает, таким образом, вид: Mz = J ·ω. (1.89) Полученная формула аналогична формуле Pz = mVz для поступательного движения. Роль массы играет момент инерции, роль линейной скорости — угловая скорость. Подставив выражение (1.89) в уравнение для момента импульса (1.78), получим J ·β z = Nz. (1.90) где βz. — проекция на ось вращения углового ускорения В общем случае несимметричного тела вектор M не совпадает по направлению с осью вращения тела и поворачивается вокруг этой ocи вместе с телом, описывая конус. Из соображений симметрии ясно что для однородного тела, симметричного относительно оси вращения, момент импульса относительно точки, лежащей на оси вращения, совпадает с направлением оси вращения. В этом случае имеет место соотношение:
Из выражения (1.91) следует, что при равенстве нулю момента внешних сил произведение Jω остается постоянным Jω = const и изменение момента инерции влечет за собой соответствующее изменение угловой скорости вращения тела. Этим объясняется известное явление, состоящее в том, что человек, стоящий на вертящейся скамье, разводя руки в стороны либо прижимая их к туловищу, изменяет частоту вращения. Из полученных выше выражений ясно, что момент инерции является такой же характеристикой свойства инерции макроскопического тела в отношении вращательного движения, как инертная масса материальной точки в отношении поступательного движения. Из выражения (1.88) следует, что момент инерции вычисляется путем суммирования по всем частицам тела. В случае непрерывного распределения массы тела по его объему естественно перейти от суммирования к интегрированию, вводя плотность тела. Если тело однородно, то плотность определяется отношением массы к объему тела:
Для тела с неравномерно распределенной массой плотность тела в некоторой точке определяется производной
Момент инерции представим в виде:
где D V — микроскопический объем, занимаемый точечной массой. Поскольку твердое тело состоит из большого числа частиц, практически непрерывно заполняющих весь занимаемый телом объем, в выражении (1.94) микроскопический объем можно считать бесконечно малым, в то же время полагая, что точечная масса «размазана» по этому объему. Фактически мы производим сейчас переход от модели точечного распределения масс к модели сплошной среды, какой в действительности и является твердое тело благодаря большой его плотности. Произведенный переход позволяет в формуле (2.94) заменить суммирование по отдельным частицам интегрированием по всему объему тела:
Здесь величины ρ и r являются функциями точки, например, ее декартовых координат.
Формула (1.95) позволяет вычислять моменты инерции тел любой формы. Вычислим в качестве примера момент инерции однородного диска относительно оси, перпендикулярной к плоскости диска и проходящей через его центр (рис.). Поскольку диск однороден, плотность можно вынести из-под знака интеграла. Элемент объема диска dV = 2πr· b · dr, где b — толщина диска. Таким образом,
где R — радиус диска. Введя массу диска, равную произведению плотности на объем диска π· R2 b, получим:
Нахождение момента инерции диска в рассмотренном примере облегчалось тем, что тело было однородным и симметричным, а момент инерции вычислялся относительно оси симметрии тела. В общем случае вращения тела произвольной формы вокруг произвольной оси, вычисление момента инерции может быть произведено с помощью теоремы Штейнера: момент инерции относительно произвольной оси равен сумме момента инерции J0 относительно оси, параллельной данной и проходящей через центр инерции тела, и произведения массы тела на квадрат расстояния между осями: J = J0 + ma2. (1.98) Например, момент инерции диска относительно оси О' в соответствии с теоремой Штейнера:
|
|||||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 275; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.139.235.100 (0.007 с.) |


 . (1.84)
. (1.84)
 (1.85)
(1.85) . (1.86)
. (1.86) . (1.87)
. (1.87) (1.88)
(1.88) . Это уравнение эквивалентно по форме второму закону Ньютона.
. Это уравнение эквивалентно по форме второму закону Ньютона. . (1.91)
. (1.91) . (1.92)
. (1.92) . (1.93)
. (1.93) , (1.94)
, (1.94) . (1.95)
. (1.95)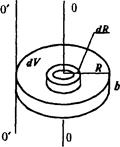
 , (1.96)
, (1.96) . (1.97)
. (1.97) (1.99)
(1.99)


