
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Массовые силы элементов конструкцииСодержание книги Похожие статьи вашей тематики
Поиск на нашем сайте
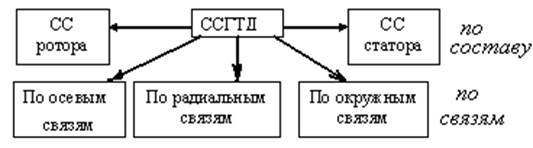
СИЛОВЫЕ СИСТЕМЫ ГТД Силовая система ГТД – система узлов и деталей, воспринимающих усилия, действующие на элементы ГТД, и передающая результирующую действующих сил на узлы крепления двигателя к самолёту. Она состоит из силовой системы ротора и силовой системы статора.
Силовая система ГТД может быть представлена в виде структурной схемы. Графическое отображение силовой системыможет быть в виде схемы. Силовая схема - схематичноеграфическое отображение силовой системы. Силовая схема показывает структуру и направление передачи усилий и моментов, возникающих в двигателе. Силовая система ГТД может быть также графически отображена конструктивно-силовой схемой. Конструктивно-силовая схема – схематичное графическое отображение взаимного положения узлов, деталей и элементов ГТД, невоспринимающих и воспринимающих усилия, действующие на них, и передающих результирующую действующих сил на узлы крепления двигателя к самолёту. Усилия, действующие в ГТД. При работе двигателя на его детали и узлы действуют усилия (силы и моменты): массовые силы элементов конструкции ( тяжести,инерции ); гироскопические моменты роторов двигателя; тепловые нагрузки; вибрационные нагрузки; газовые (аэродинамические) силы; механические силы (силы трения).
Массовые силы элементов конструкции Сила тяжести Р = Mg, где M – масса конструкции двигателя, g -ускорения свободного падения Силы инерции движущихся масс Силы, вызывающие перегрузку
где Для истребителей
Силы от статической неуравновешенности ротора
Рцб = m (u 2 / e) = me w 2, Где m – масса неуравновешенная; u – окружная скорость вращения ротора (м/с); е – смещение центра масс от оси вращения (эксцетриситет); w - частота вращения. Рцб переменная по направлению сила. Она – источник вибрационных нагрузок.
Гироскопические моменты При выполнении самолетом эволюций на вращающийся ротор двигателя действует гироскопический момент Мг= Jp W w sin q, где Jp – массовый полярный момент инерции ротора относительно оси вращения,
w - угловая скорость ротора, W - угловая скорость самолета при его эволюции, q - угол между векторами w и W. Для цилиндра Jp = Mr 2, где М – масса цилиндра, r – его радиус. W = V / R, где V – скорость полета самолета, R – радиус кривизны траектории, например, радиус виража или выхода из пике. Чем больше скорость полета и меньше радиус траектории, тем больше угловая скорость самолета. Удобно пользоваться системой координат xyz, откладывая от начала координат по оси х вектор угловой скорости Вибрационные нагрузки При работе ГТД его детали подвергаются действию знакопеременных (вибрационных) нагрузок. Основными источниками возникновения знакопеременных нагрузок являются окружная и радиальная неравномерность потока газа в проточном тракте двигателя и неуравновешенные центробежные силы вращающихся масс ротора. Неравномерность потока газа создают стойки корпусов, направляющие и спрямляющие аппараты, входное устройство двигателя, перепуск или отбор воздуха из проточного тракта, пульсационное горение в камерах и т. п. Газовые силы Они возникают при течении газа по какому-либо каналу и передаются через стенки на узлы крепления для неподвижных деталей или приводят во вращение случае подвижных (рабочие лопатки).
Для их определения выделим канал, ограниченный твердыми стенками, и возьмем в нем два сечения 1-1 и 2-2. Ось х направим по полету, ось у – в окружном направление по вращению ротора. Обозначим через R силу, действующую со стороны газа на стенку, и разложим ее на два направления – Rу – окружное и Rх - осевое. Ограничимся пока определением осевой силы. Она, согласно уравнению Бернулли, состоит из двух компонент – статической Rст и динамической Rд: Rх = Rст + Rд, Rст =Р2F2 - Р1F1, Rд´t=mV2 - mV1, Rд =V2´m/t-V1´m/t, или G – секундный расход воздуха; С1x и С2x – осевые составляющие скорости. Осевая сила равна Rx= G(C2x-C1x)+ Р2F2-Р1F1. Баланс осевых сил в ТРД Тяга ТРД образуется в результате суммирование осевых составляющих сил входного устройства, ВНА, направляющих аппаратов всех ступеней компрессора, камеры сгорания, турбины и выходного устройства. В ГТД тягу увеличивает также осевое усилие на РУП.
Силовые системы роторов включают роторы компрессоров, турбин и соединяющие их валы. Они различаются по количеству и расположению опор. Каждый ротор двигателя должен иметь как минимум две опоры (роторы крупных ГТД могут иметь 3 или 4 опоры). Одна из опор ротора - радиально-упорная. Она обеспечивает его осевую фиксацию относительно статора и кроме радиальных нагрузок воспринимает осевую силу ротора. В радиально-упорных опорах используются шариковые подшипники. В остальных, радиальных опорах - используют роликовые подшипники. Схемы систем роторов (использовать лабораторные работы студентов). Радиальные связи Рассмотрим одновальный двигатель. По числу опор он может быть двухопорным, трехопорным и четырехопорным. Двухопорные Достоинство – система статически определима. Недостаток – большое расстояние между опорами, следовательно, малая жесткость и большие прогибы.
Недостаток – большое расстояние между опорами. Пример: КВД двигателя Д-36. Схема б. Достоинство – малое расстояние между опорами. Недостаток – консольное расположение роторов ОК и ГТ, что возможно при числе ступеней, не превышающем 3. Поэтому в компрессорах применяется только в каскаде НД – на вентиляторе. При большем числе ступеней увеличиваются прогибы ротора, что и ограничивает применение данной схемы. В чистом виде такая схема практически не применяется. Схемы в, г. Достоинство – снижается расстояние между опорами. Недостаток – связан с появлением консольных участков, о которых говорилось при рассмотрении схемы б. Схема в применяется в двигателях без ВНА, в основном для размещения вентилятора (вентилятор двигателя Д-36). Схему г можно использовать только при небольшом количестве ступеней турбины (каскад СД двигателя Д-36). Трехопорные
Достоинство: – повышенная жесткость ротора. Недостатки – 1. Система один раз статически неопределима, если ротора ОК и ГТ соединены жестко. 2. Повышенные требования к соосности опор. Для того, чтобы система была статически определима, в узел соединения вводят шарнир, а крутящий момент передается через шлицы. Схема а. Достоинство – удобство доступа к РУП в процессе эксплуатации с целью его осмотра и дефектации. Недостаток – большое удлинение ротора в районе турбины. Пример – ГТД 3Ф, ТВД-10Б. Схема б. Достоинство – оптимальное распределение удлинения по оси ротора. Пример – АЛ-21Ф-3, КНД Д-30, Д-30КУ (если не учитывать межвального подшипника). Схемы в, г. Достоинство – уменьшается расстояние между опорами и, следовательно, повышается жесткость ротора и возрастают критические обороты. Недостаток – наличие консольных участков требует увеличенных радиальных зазоров по лопаткам, что приводит к снижению кпд. Примеры. Схема в) может использоваться только для компрессоров без ВНА: АИ-25, каскад НД ПС-90 (без учета межвального подшипника), Р-79В-300 (подъемно-маршевый двигатель, «Союз»). Схема г): АИ-20, АИ-24, АЛ-7, АМ-3, АМ-5, РУ-19-300, РД-9Б, Д-25В, Д-20П. Как видно из приведенных примеров, наибольшее применение нашли схемы б) и г). Требования к подвижным соединениям 1. Конструктивная простота и надежность 2. Допустимость подхода к соединениям инструментами сборки, разборки и контроля. Четырехопорные роторы Достоинство – повышенная жесткость ротора. Недостаток – система дважды статически неопределима. Из-за этого значительно усложняется сборка ротора. Например, в двигателе НК-12 роликоподшипник перед турбиной зачастую работал с недогрузкой вследствие неопределенности своего положения. Из-за этого возникало проскальзывание роликов, ведущее к их преждевременному износу. Для устранения этого дефекта в настоящее время задняя опора при сборке смещается вниз на 0,17мм, что как бы «переламывает» ось двигателя, за счет чего догружается передний роликовый подшипник турбины.
Силовая система статоров Силовая система статоров включает корпуса входного устройства, компрессора, камеры сгорания, турбины, выходного устройства, опор, направляющие аппараты компрессора и сопловые аппараты турбины. СИЛОВЫЕ СИСТЕМЫ ГТД Силовая система ГТД – система узлов и деталей, воспринимающих усилия, действующие на элементы ГТД, и передающая результирующую действующих сил на узлы крепления двигателя к самолёту. Она состоит из силовой системы ротора и силовой системы статора.
Силовая система ГТД может быть представлена в виде структурной схемы. Графическое отображение силовой системыможет быть в виде схемы. Силовая схема - схематичноеграфическое отображение силовой системы. Силовая схема показывает структуру и направление передачи усилий и моментов, возникающих в двигателе. Силовая система ГТД может быть также графически отображена конструктивно-силовой схемой. Конструктивно-силовая схема – схематичное графическое отображение взаимного положения узлов, деталей и элементов ГТД, невоспринимающих и воспринимающих усилия, действующие на них, и передающих результирующую действующих сил на узлы крепления двигателя к самолёту. Усилия, действующие в ГТД. При работе двигателя на его детали и узлы действуют усилия (силы и моменты): массовые силы элементов конструкции ( тяжести,инерции ); гироскопические моменты роторов двигателя; тепловые нагрузки; вибрационные нагрузки; газовые (аэродинамические) силы; механические силы (силы трения).
Массовые силы элементов конструкции Сила тяжести Р = Mg, где M – масса конструкции двигателя, g -ускорения свободного падения
|
|||||||
|
|
Последнее изменение этой страницы: 2021-04-20; просмотров: 659; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.220 (0.016 с.) |


 ,
, - коэффициент максимальной эксплуатационной перегрузки,
- коэффициент максимальной эксплуатационной перегрузки,  =8 (в вертикальной плоскости). Для пассажирских самолетов
=8 (в вертикальной плоскости). Для пассажирских самолетов  =2,5….3,6 – полет в неспокойном воздухе (ТУ-154).
=2,5….3,6 – полет в неспокойном воздухе (ТУ-154). Центробежные силы инерции возникают в элементах конструкции вращающегося ротора ГТД.
Центробежные силы инерции возникают в элементах конструкции вращающегося ротора ГТД. Они определяются по формуле
Они определяются по формуле ,
, (по отечественному стандарту вращение ротора происходит против часовой стрелки, если смотреть со стороны сопла, поэтому откладываем вектор
(по отечественному стандарту вращение ротора происходит против часовой стрелки, если смотреть со стороны сопла, поэтому откладываем вектор  (при этом вращение происходит в сторону меньшего угла между векторами).
(при этом вращение происходит в сторону меньшего угла между векторами).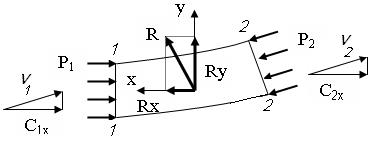
 Rд = G(C2x-C1x)
Rд = G(C2x-C1x)
 Рассмотрим схему а. Д остоинство – задняя опора расположена в зоне низких температур.
Рассмотрим схему а. Д остоинство – задняя опора расположена в зоне низких температур. Радиально-упорный подшипник желательно ставить ближе к узлу, где осевое смещение ротора влияет на осевой зазор. Обычно РУП ставится в районе средней опоры двигателя.
Радиально-упорный подшипник желательно ставить ближе к узлу, где осевое смещение ротора влияет на осевой зазор. Обычно РУП ставится в районе средней опоры двигателя. Другие примеры четырехопорной конструкции роторов – ТР-1 (1947г), АЛ-5 (Люлька, 1952г). Таким образом, четырехопорные двигатели использовались только в самом начале широкого применения газотурбинной техники. Сейчас в основном используются трехопорные и даже двухопорные (Д-36) роторы.
Другие примеры четырехопорной конструкции роторов – ТР-1 (1947г), АЛ-5 (Люлька, 1952г). Таким образом, четырехопорные двигатели использовались только в самом начале широкого применения газотурбинной техники. Сейчас в основном используются трехопорные и даже двухопорные (Д-36) роторы.


