
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Графо - аналитический метод исследования
Кинематики механизмов Метод планов скоростей и ускорений относится к графо-аналитическим методам исследования кинематики механизмов. Планом скоростей (ускорений) механизма называют чертеж, на котором скорости (ускорения) различных точек изображены в виде векторов, показывающих направления и величины (в масштабе) этих скоростей (ускорений) в данный момент времени. Абсолютное движение любой точки звена может быть составлено из переносного и относительного. За переносное принимается известное движение какой-либо точки. Относительное - движение данной точки относительно той, движение которой принято за переносное:
Этот принцип в равной степени относится к перемещениям, скоростям и ускорениям:
Планы скоростей и ускорений обладают следующими свойствами: - на плане абсолютные скорости (ускорения) изображаются векторами, выходящими из полюса плана: р(π). На конце вектора абсолютной скорости (ускорения) ставится строчная (маленькая) буква, соответствующая той точке механизма, скорость (ускорение) которой данный вектор изображает: ра (πа), рв (πв). - отрезок, соединяющий концы векторов абсолютных скоростей, представляет собой вектор относительной скорости соответствующих точек. Вектор относительной скорости направлен на плане к той точке, которая в индексе скорости стоит на первом месте: ва (от а к в). - фигуры, образованные точками одного и того же жесткого звена на плане и на механизме, подобны. Поэтому, если на звене известны скорости и ускорения двух точек, то скорость и ускорение любой третьей точки этого же звена можно найти по подобию; - имея план скоростей, можно найти угловую скорость любого звена механизма. Для определения угловой скорости исследуемого звена надо взять относительную скорость двух любых точек данного звена и разделить на расстояние между этими точками на механизме ωАВ= - имея план ускорений, можно найти угловое ускорение любого звена механизма. Для определения углового ускорения исследуемого звена надо взять тангенциальную составляющую относительного ускорения двух любых точек данного звена и разделить на расстояние между этими точками на механизме: εАВ = - звенья, соединенные в поступательную кинематическую пару, имеют одинаковые угловые скорости и одинаковые угловые ускорения.
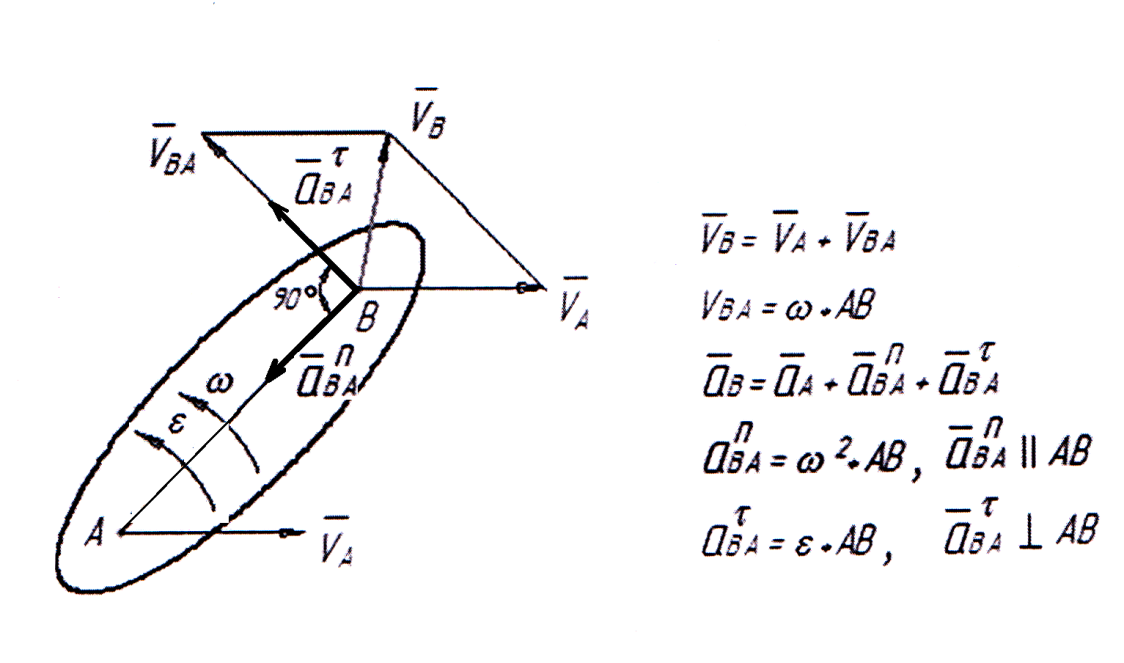
При кинематическом исследовании плоских механизмов методом планов встречается 2 случая: - две точки (одна исследуемая, вторая с известным законом движения, которое принимается в качестве переносного) принадлежат одному и тому же жесткому звену (рис. 20). В данном случае относительное движение этих точек получается за счет вращательного движения звена, на котором они находятся. Относительное ускорение при этом раскладывается на нормальное (центростремительное – стремящееся к центру вращения) и тангенциальное (по касательной в сторону вращения углового ускорения).
Рис. 20. Вращение точки В относительно точки А
- звенья соединяются поступательной парой. В этом случае рассматриваются две точки, совпадающие в данный момент времени по своему положению, но принадлежащие разным звеньям – одна ползуну, другая направляющей (рис. 21, а).
Рис.21. Случаи движения ползуна: а) движение ползуна вдоль направляющей и его кинематическая схема, б) направление кориолисово ускорения
Если известен закон движения направляющей 1, то известны характеристики движения любой точки на этом звене, в этом случае движение точки С1 принимается в качестве переносного. Движение точки С2, принадлежащей ползуну, относительно точки С1 получается за счет поступательного движения ползуна вдоль направляющей (влияние вращательного движения исключается, т.к. радиус вращения равен нулю – положение точек С1 и С2 совпадает) (рис.21, а). При определении ускорений кроме относительного ускорения, направленного вдоль направляющей, возникает кориолисово ускорение (рис.21, б). Исследование кинематики механизма методом планов начинается с начального механизма (с входного звена) и далее ведется по группам Ассура в порядке их присоединения к механизму. Для каждой группы Ассура разработаны методы решения (уравнения и порядок построения планов), которые являются неизменными, независимо от того, в каком механизме данная группа Ассура находится. Уравнения планов для групп Ассура второго класса приведены в табл. 7.
Таблица 7 Кинематический анализ групп Ассура II класса методом планов
Продолжение табл. 7
5.1. Пример построения плана скоростей Рассмотрим методику построения плана скоростей на примере механизма, представленного на рис. 22, в который входят две группы Ассура. Известны: ω1= 1 рад/с, АВ=0,12 м, ВC=0,5 м, CD=0,5 м, DE=0,4 м, DS3=0,1 м, В S2=0,25 м. Построение плана скоростей механизма начинают с определения скорости центра кинематической пары входного звена (т.В), к которой присоединена первая структурная группа Ассура. Для определения скорости любой точки звена необходимо знать скорость какой-либо одной точки звена по величине и направлению и направление скорости второй точки. 1. Вычислим скорость точки В принадлежащей в 1 звену. Точка совершает вращательное движение. Скорость этой точки определим по формуле: Звено АВ совершает равномерное вращательное движение VВ =ω1∙АВ=1∙0,12=0,12 м/с., где VВ - ⊥ R (вектор направлен в сторону вращения угловой скорости ω1).
Рис. 22. К кинематическому расчёту: а) кинематическая схема механизма; б) план скоростей механизма; в) план ускорений механизма; г) направление кориолиса ускорения
2. Выберем коэффициент масштабности скорости по формуле:
μV = μV =
где рв – отрезок (от 40 до 70 мм) на плане скоростей (выбирается произвольно). Из точки полюса р отложим вектор рв = 50 мм перпендикулярно к положению звена 1, в сторону направления угловой скорости звена 1. Данный вектор определяет направление вектора скорости т. В. 3. Для определения скорости т. С разложим плоскопараллельное движение звена 2 на переносное (поступательное) вместе с точкой В и относительное (вращательное) вокруг т. В. С другой стороны, т. С находится в относительном движении вокруг неподвижной точки Д. Поэтому, В векторных уравнениях под векторами указываются одной чёрточкой известные значения и направления векторов. Например, у вектора скорости т. В известны значение и направление, а у вектора относительной скорости СВ известно только направление.
Векторные уравнения составлены для гр. Ассура II 1 вида в соответствии с Приложением. Представленные уравнения решим графически. Решение каждого уравнения начинаем из точки полюса. I векторное уравнение: II векторное уравнение: VC = рс ∙ μ V, м/с, где рс - величина измеренная с плана скоростей в мм. 4. Перейдем к структурной группе II кл.4 вида. Для определения скорости т.Е5 составим векторные уравнения 4 вида. Скорость т.Е3 звена 3 определим используя теорему подобия
Отрезок ре3 отложим от полюса «р» на продолжении отрезка «рс» в противоположном направлении. Измерив расстояние «ре3» и умножив на коэффициент масштабности скорости μ V получим абсолютную скорость т.Е3 V Е3 = ре3 ∙ μ V , м/с. 5. Скорость т.Е5, которая является общей для звеньев 4 и 5 определим раскладывая движение на переносное (вращательное) вместе с т. Е3 и относительное (поступательное) по отношению к точке Е3. В абсолютном движении т. Е5 перемещается вдоль оси Х-Х. Поэтому
Через т.е3 проводим линию, параллельную DЕ, через полюс р линию, параллельную Х-Х до пересечения в т. «е5». Вектор «ре5» изображает скорость Е5. Измерив расстояние «ре5» на плане скоростей в «мм» и умножив на коэффициент масштабности μV получим абсолютную скорость VЕ5 VЕ5 = ре5 ∙ μV, м/с. 6. Для определения скоростей точек центров масс S звеньев 2 и 3 составим подобия по теореме
где bc, pc - из плана скоростей в мм. Отложим эти расстояния на плане скоростей и вычислим абсолютные скорости: VS 2 = р s 2 ∙ μ V, м/с, VS 3 = р s 3 ∙ μ V, м/с/. Векторы рs2, рs3 изображают абсолютные скорости VS2, VS3. Абсолютные скорость т. S5 равна скорости т.Е5 VS5 =VЕ5. 7. Из плана скоростей находим относительную скорость VЕ5Е3
«е5е3»- из плана скоростей, мм
«е5е3, ре5, вс, рс» - из плана скоростей, мм.
5.2. Пример построения плана ускорений Для определения ускорения любой точки звена необходимо знать ускорение какой-либо одной точки звена полностью (величину и направление) и направление ускорения второй. 1. Вычислим ускорение т. В принадлежащей звену 1. Звено 1 совершает равномерное вращательное движение, значит ускорение т. В определим по формуле
Вектор ускорения направлен к центру вращения (рис. 22, в). 2. Выберем коэффициент масштабности ускорения по формуле μа = где πв – отрезок (от 40 до70 мм) на плане ускорений (выбирается произвольно). Из точки полюса π отложим вектор πв = 75 мм μа = Данный вектор определяет направление вектора ускорения т. В. 3. Для определения ускорения т. С составим векторные уравнения для группы Ассура II кл.1 вида по табл. 7
Нормальные ускорения вычисляются по известным из кинематики формулам:
Для того чтобы, отметить эти ускорения на плане необходимо возвести их в масштаб:
Вектор Абсолютное ускорение т. С определяется по формуле
4. Для расчёта ускорения т. Е3 звена 3 используем теорему подобия:
Абсолютное ускорение т.Е3 вычисляется по формуле аЕ3= Отрезок «πе3» откладываем на продолжении отрезка «πс» в противоположном направлении. 5. Ускорение т. Е5 которая является общей для звеньев 4 и 5, находим из уравнения
( где
Модуль кориолиса ускорения вычисляется по формуле
Направление кориолиса ускорения определяется поворотом относительной скорости е3k = Через т. «k» проводим линию, параллельную DE, вдоль которой направлено относительное ускорение. Через полюс π проводим линию, параллельную оси Х-Х, вдоль которой направлено ускорение т. Е5 . Точка пересечения этих линий есть т. «е5»-конец вектора ускорение т. Е. 6. Ускорения т.S2 и S3 определяем по теореме подобия. Точка «s2» на плане ускорений делит отрезок «bc» пополам. Положение т. «s3» находим из выражения
πs3 Ускорение т.S5 равно ускорению т.E5. Из плана ускорений получаем абсолютное ускорение т. Е5
Определим угловые характеристики звеньев:
т.к. два звена соединены одной поступательной парой.
«n1c, n2c» определяются путём измерения из плана ускорений в мм. Аналогично можно рассчитать кинематические характеристики для другого положения механизма. Динамика машин и механизмов Силовой расчет механизмов Силовой расчет механизмов относится к решению первой задачи динамики. Как видно из содержания задач динамики, приведенного выше, первая задача включает в себя две части: изучение сил, действующих на звенья механизма; определение неизвестных сил при заданном законе движения на ведущем звене.
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-05; просмотров: 210; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.144.170 (0.056 с.) |
|||||||||||||||||||||||||||||||||||||||||||
 .
.

 ;
; ;
;

























 , [
, [  ] =
] =  = 0,0024
= 0,0024  ],
],
 (VВ ⊥АВ, VСВ⊥СВ)
(VВ ⊥АВ, VСВ⊥СВ) (VD = 0 - стойка, VСD⊥СD)
(VD = 0 - стойка, VСD⊥СD) Из точки полюса р проводим скорость т. В (VВ = рв). Через т. В проводим линию перпендикулярную СВ.
Из точки полюса р проводим скорость т. В (VВ = рв). Через т. В проводим линию перпендикулярную СВ. DE, СD – длины [м]. «рс» - из плана скоростей, длина вектора рс [мм].
DE, СD – длины [м]. «рс» - из плана скоростей, длина вектора рс [мм].
 =
=  ,
,
 ,
,

 лее, вычислим угловые характеристики звеньев:
лее, вычислим угловые характеристики звеньев:

 =0, звено 5 не имеет вращения.
=0, звено 5 не имеет вращения. = ω12∙ АВ = 1∙0,12 = 0,12 м/с2.
= ω12∙ АВ = 1∙0,12 = 0,12 м/с2. , [
, [  ],
], = 0,0016
= 0,0016  (
( | | АВ,
| | АВ,  | | СВ,
| | СВ,  ),
), , (
, ( | | СD,
| | СD,  ).
).



 направлен вдоль линии СВ от т. С к т. В – центру относительного вращения звена, а вектор
направлен вдоль линии СВ от т. С к т. В – центру относительного вращения звена, а вектор  по линии СD к центру D. Через точки n1 и n2 плана ускорений проводим направления векторов касательных ускорений, пересечение которых определяет точку «с» – конец «вектора искомого ускорения т. С».
по линии СD к центру D. Через точки n1 и n2 плана ускорений проводим направления векторов касательных ускорений, пересечение которых определяет точку «с» – конец «вектора искомого ускорения т. С». м/с2,
м/с2, = 30,3 мм (определяем путём измерения).
= 30,3 мм (определяем путём измерения). ,
,
 ∙
∙  ,
, ,
, ⊥ DE,
⊥ DE,  ⊥ DE,
⊥ DE,  | | DE),
| | DE), = 2
= 2  ω3 ∙
ω3 ∙  = 2∙ 0,24∙ 0,037 = 0,018 м/с2.
= 2∙ 0,24∙ 0,037 = 0,018 м/с2. на 900 по направлению переносной угловой скорости ω3 (рис. 17, г). Представленное векторное уравнение решаем графически. Через т. «е3» проводим линию, перпендикулярную DE, и откладываем на ней отрезок «е3k», изображающий кориолиса ускорение
на 900 по направлению переносной угловой скорости ω3 (рис. 17, г). Представленное векторное уравнение решаем графически. Через т. «е3» проводим линию, перпендикулярную DE, и откладываем на ней отрезок «е3k», изображающий кориолиса ускорение =
=  = 11,25 мм.
= 11,25 мм. =
= 
 = 30,3 ∙
= 30,3 ∙  = 6 мм.
= 6 мм.
 = 0, т.к. звено 1совершает равномерное вращательное движение.
= 0, т.к. звено 1совершает равномерное вращательное движение.
 ,
, 0, т.к. звено 5 не имеет вращения.
0, т.к. звено 5 не имеет вращения.


