
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение инерционных нагрузок на звенья механизма при различных видах движений
1. При поступательном движении звена равнодействующая сил инерции всех элементарных масс определяется по формуле
где F ин - приложена в центре масс звена и направлена противоположно ускорению
Рис. 23. Сила инерции звена при его поступательном движении (момент инерции равен нулю)
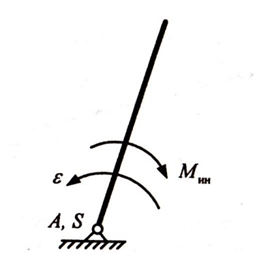
2. Если звено совершает вращательное движение вокруг оси, совпадающий с центром масс, то силы инерции всех элементарных масс можно свести к паре сил с моментом (рис. 24)
где
Рис. 24. Момент инерции звена при его вращении вокруг оси, походящей через центр масс звена (сила инерции равна нулю)
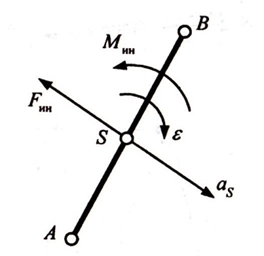
Знак «-» в формуле для Мин указывает на то, что момент направлен в сторону, противоположному угловому ускорению. 3. Если звено совершает сложное движение (рис. 25). В этом случае движение звена раскладывается на переносное поступательное со скоростью и ускорением центра масс и на относительное вращательное движение вокруг центра масс. Силы инерции всех элементарных масс сводятся к равнодействующей силе инерции Момент инерции направлен в сторону, противоположную угловому ускорению
Рис. 25. Сила и момент инерции звена, совершающего сложное движение
4. Звено совершает вращательное движение относительно оси, не проходящей через центр масс звена (рис. 26).
Рис. 26. Сила и момент инерции звена, вращающегося вокруг оси, не проходящей через центр масс звена
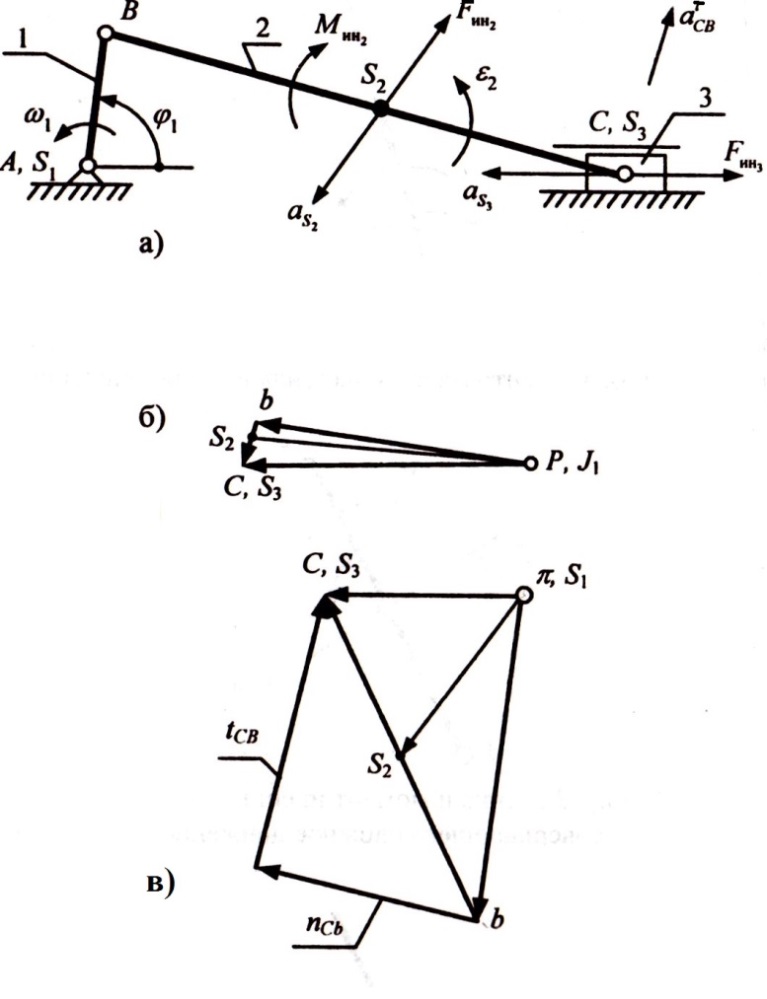
Этот случай рассматриваем как общий случай сложного движения звена: силы инерции всех элементарных масс также сводятся к равнодействующей силе инерции Пример: Определить Fинi и Минi кривошипно - ползунного механизма (рис.27) Дано: ω1= const, l 1, l 2, φ 1 (положение механизма определяется обобщенной координатой φ 1), m 1, m 2, m 3, Is 1, Is 2 . Решение: Пусть центр масс 1звена S 1 находится в точке А (в центре вращения звена1), S 3 совпадает с т. С, S 2 – посередине звена 2. Для определения F ин и Мин, надо знать линейные ускорения центров масс и угловые ускорения звеньев, для чего (при графическом решении задачи) необходимо построить планы скоростей и ускорений (рис. 27, б, в).
Звено 1 совершает равномерное вращательное движение (т.к. ω1 = const, то F ин = 0, Мин i = Isi ∙ Звено 2 совершает плоскопараллельное движение:
Для нахождения ускорения т.S2 воспользуемся теоремой подобия В S 2 /ВС = в s 2 /вс; => в s 2 = вс ∙ В S 2 /ВС.
Рис. 27. Кривошипно-ползунный механизм: а) направления сил инерции и моментов инерции, б) план скоростей механизма, в) план ускорений механизма
Найденный отрезок «вs2» откладываем от точки в. Чтобы найти абсолютное ускорение центра масс, полученную точку s2 соединим с полюсом плана ускорений π, тогда
Сила инерции приложена в центре масс S2 и направлена в противоположную сторону от ускорения центра масс. Для нахождения момента инерции
Для определения направления вращения Звено 3 совершает поступательное движение в направляющих стойки. Сила инерции звена 3 будет определяться Мин3 =0, т.к. Ɛ3= 0. Принцип освобождаемости Если рассматривать механизм в целом, то имеющаяся в каждой кинематической паре, согласно принципу равенства действия и противодействия, пара сил (реакций), действующих по одной линии действия и равных по величине, уравновешивается и на равновесие механизма в целом не влияет. Так что даже в простом механизме определить эти реакции невозможно – они не войдут в уравнения равновесия. Для определения реакций необходимо механизм расчленить на части, каждая из которых была бы статически определима и в которой неизвестные реакции входили бы в число внешних сил и в уравнения равновесия.
|
|||||
|
|
Последнее изменение этой страницы: 2021-04-05; просмотров: 356; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.12.36.30 (0.01 с.) |
 = - m ∙
= - m ∙  ,
, центра S масс звена (рис. 23).
центра S масс звена (рис. 23).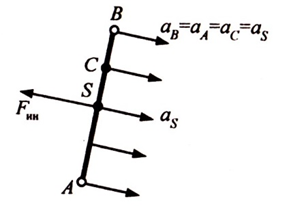
 = -
= -  s ∙
s ∙  ,
,
 .
.

 s ∙
s ∙  .
. 1 = 0). Центр масс неподвижен и as =0, следовательно,
1 = 0). Центр масс неподвижен и as =0, следовательно, I = 0 (при ω1= const).
I = 0 (при ω1= const). = - m2 ∙
= - m2 ∙ 
 = -
= -  .
.
 m 2
m 2  )∙μ a ..
)∙μ a .. m 3
m 3  m3
m3  )∙ μ a (направлена в противоположную сторону от
)∙ μ a (направлена в противоположную сторону от  ).
).


