Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
П ример решения задачи структурного анализа
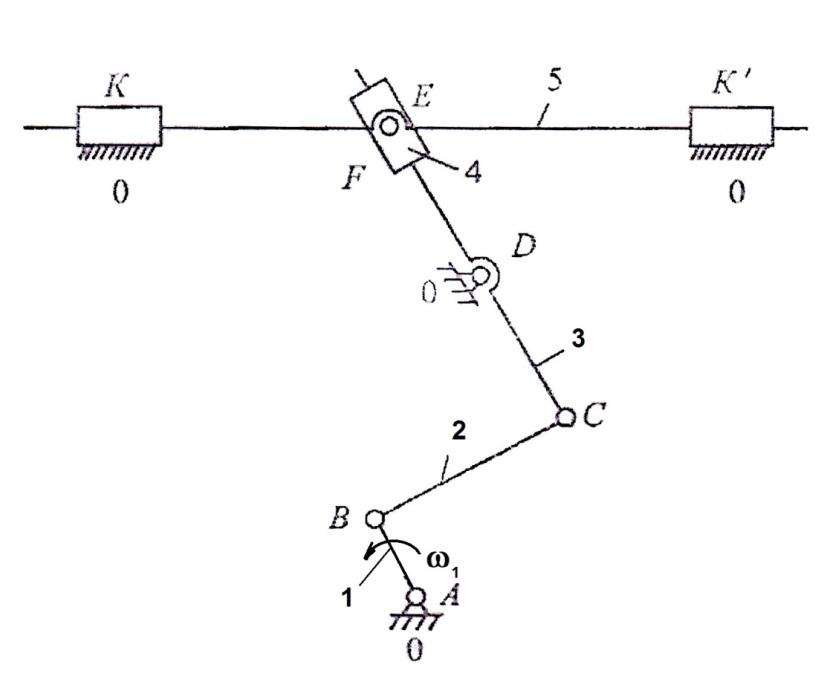
1. Изобразим кинематическую схему механизма (рис. 17). Выявляем сложные и разнесенные кинематические пары. Кинематическая пара К (К′) является разнесенной, и поэтому считаем ее как одну кинематическую пару К.
Рис. 17. Кинематическая схема механизма
2. Классифицируем кинематические пары и звенья механизма. Составим таблицы5 и 6.Исследуемый механизм состоит только из одноподвижных кинематических пар пятого класса (р5=7), где р5 – общее число кинематических пар 5 класса в механизме. Таблица 5 Классификация кинематических пар
Таблица 6 Классификация звеньев механизма
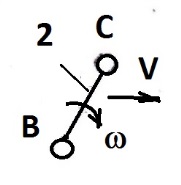
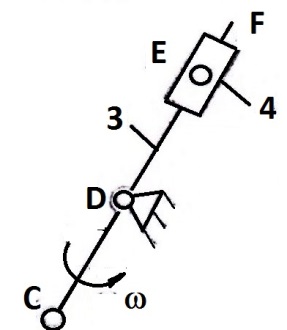
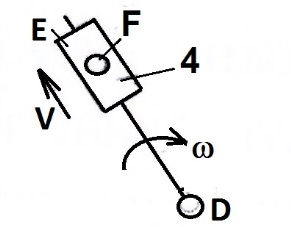
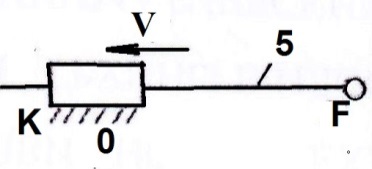
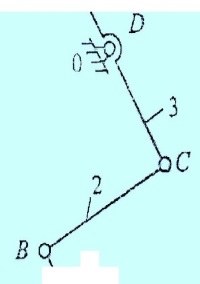
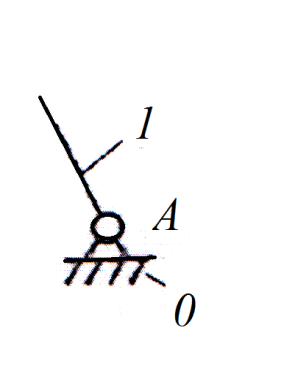
3. Выделим самостоятельные структурные группы. На рис. 18 представлена классификация структурных групп II класса (1,2,3 видов). Структурные группы состоят из 2-х звеньев и 3-х кинематических пар. Изобразим выделенную структурную группу.
Рис. 18. Классификация на структурные группы и начальный (первичный) механизм: а) II кл.1 вид; б) II кл. 4 вид; в) начальный механизм
4. Построение планов положений исследуемого механизма: 1) Выбираем место и расположение стойки (А) начального звена и, соблюдая принятые обозначения, вычерчиваем начальное звено. 2) Произвольно (50…70 мм) выбираем чертежный размер начального звена. Раствором циркуля, равным выбранному размеру, проводим тонкой линией траекторию движения начального звена (кривошипа). 3) Определяем масштабный коэффициент длин μ l = l 1 / l AB (м /мм), где l 1 – истинная длина кривошипа АВ, м; l AB – произвольно выбранный чертежный размер кривошипа в мм
5. Определение степени подвижности простых механизмов и всего механизма в целом. Подвижность механизмов определим по формуле Чебышева W=3∙ n -2∙ р5 - р 4. Шарнирный четырехзвенник имеет: три подвижных звена (n= 3) 1, 2, 3; четыре одноподвижные кинематические пары 5 класса, значит р5=4: А, В, С, D. р4=0. Тогда его подвижность будет WШ = 3 ∙ 3 - 2 ∙ 4 = 1. Кулисный механизм имеет: три подвижных звена 3,4,5 значит, n=3 и четыре кинематические пары 5 класса D, E, F, K, значит р5=4. Так как кулисный механизм по количественному и качественному составу кинематических пар и звеньев ничем не отличается от шарнирного четырехзвенника, то его подвижность определяется по тем же формулам и также равна единице (WК =1).
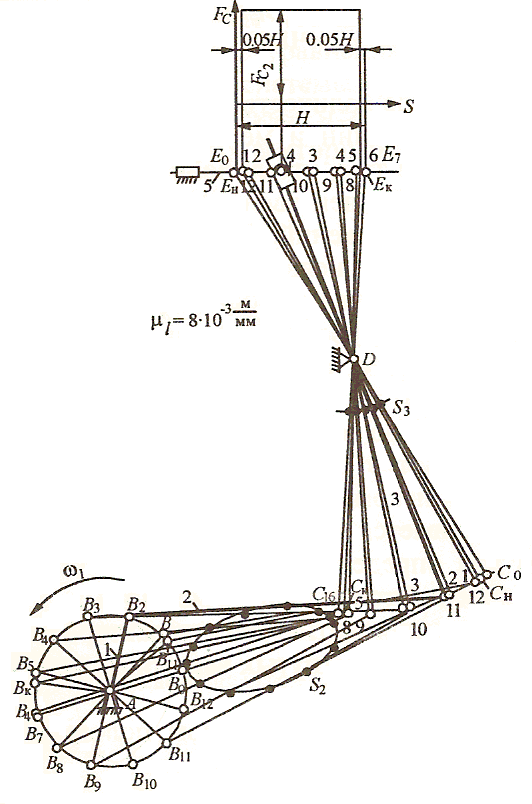
Рис. 19. План положений механизма
Определим подвижность всего механизма. Подвижность всего механизма найдем по формуле Чебышева W = 3 · 5 -2 · 7 = 1. 6. Напишем формулу строения механизма I (1) → II (2 -3) → II (4 - 5).
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-05; просмотров: 157; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.121.242 (0.006 с.) |




 В соответствии с формулой находим чертежные координатные размеры всех остальных звеньев механизма, где lBC – чертежная длина звена, например, ВС; l 2 – истинный размер 2 звена. Разбиваем траекторию движения входного звена на 12 равных участков. Тонкой линией проводи траекторию движения точки В на кривошипе и все последующие точки на всех положениях. Выделяем жирной линией механизм в исходном положении и отмечаем как положение - «0».С помощью циркуля – измерителя, начиная от каждого положения кривошипа (0 и 1-12) используя метод засечек, последовательно откладываем чертежные размеры звеньев механизма с учетом траектории их движения. Тонкими линиями прорисовываем звенья и кинематические пары, обозначая соответствующими индексами, расположенными по возрастанию в сторону направления угловой скорости (ω1) ведущего звена. В результате получаем план положения механизма. Строим траектории промежуточных точек звеньев. Для этого находим и отмечаем на звеньях во всех положениях искомые точки, а затем соединяем их в порядке последовательности плавной кривой. Полученные кривые и являются искомыми траекториями точек (рис. 19).
В соответствии с формулой находим чертежные координатные размеры всех остальных звеньев механизма, где lBC – чертежная длина звена, например, ВС; l 2 – истинный размер 2 звена. Разбиваем траекторию движения входного звена на 12 равных участков. Тонкой линией проводи траекторию движения точки В на кривошипе и все последующие точки на всех положениях. Выделяем жирной линией механизм в исходном положении и отмечаем как положение - «0».С помощью циркуля – измерителя, начиная от каждого положения кривошипа (0 и 1-12) используя метод засечек, последовательно откладываем чертежные размеры звеньев механизма с учетом траектории их движения. Тонкими линиями прорисовываем звенья и кинематические пары, обозначая соответствующими индексами, расположенными по возрастанию в сторону направления угловой скорости (ω1) ведущего звена. В результате получаем план положения механизма. Строим траектории промежуточных точек звеньев. Для этого находим и отмечаем на звеньях во всех положениях искомые точки, а затем соединяем их в порядке последовательности плавной кривой. Полученные кривые и являются искомыми траекториями точек (рис. 19).