
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система сходящихся сил. Силовой многоугольник.Стр 1 из 8Следующая ⇒
Основные понятия статики: материальная точка, свободное, несвободное тело, сила, системы сил. Материальная точка – точка имеющая массу – это не только тело, имеющее очень малые размеры, но и любое тело, размерами которого в условиях данной задачи можно пренебречь. Свободное тело (воздушный шар в полете)– если никакие другие тела не препятствуют его перемещению в любом направлении, в противном случае – тело несвободное или связанное Сила – мера механического взаимодействия тел (под действием силы F точка А будет перемещаться в направлении движения силы) F= m*a (сила = масса * ускорение). Сила векторная величина, измеряется в Ньютонах. Системы сил – совокупность сил приложенных к одному телу. 3 вида систем: 1) система сходящихся сил, 2) система параллельных сил, 3) система произвольно расположенных сил. Аксиомы статики Аксиома 1. (аксиома инерции) Всякое тело сохраняет свое состояние покоя или прямолинейного равномерного движения, пока какие-нибудь силы не выведут тело из этого состояния. На основании этой аксиомы состоянием равновесия считаем, когда тело находится в покое или движется прямолинейно и равномерно, т.е. по инерции. Аксиома 2. (аксиома взаимодействия) Силы взаимодействия между собой двух тел всегда равны по модулю и направлены по одной прямой в противоположные стороны. Если какая-нибудь система сил обладает таким свойством, что после приложения к свободному телу она не изменяет его механическое состояние, то такая система сил называется уравновешенной. Аксиома 3. (условие равновесия двух сил) Для равновесия свободного твердого тела, находящегося под действием двух сил, необходимо и достаточно, чтобы эти силы были равны по модулю и действовали по одной прямой в противоположные стороны. Аксиома 4. Равновесие (как и любое другое механическое состояние) твердого тела не нарушается, если к нему приложить или удалить систему уравновешенных сил. Аксиома 5. (аксиома параллелограмма) Равнодействующая двух сил, приложенных к телу в одной точке, равна по модулю и совпадает по направлению с диагональю параллелограмма, построенного на данных силах, и приложена в той же точке. Равнодействующая двух сил, приложенных в одной точке, равна их векторной сумме и приложена в той же точке. Ее можно найти построив треугольник сил.
3. Связи. Реакции связей. Принцип освобождаемости от связей и правила определения их реакций. Связями называют ограничения, налагаемые на положения и скорости точек тела в пространстве. Типы связей: гибкая (реакция всегда приложена от тела вдоль нити к точке подвеса), идеально гладкая плоскость (реакция всегда перпендикулярна), связь в виде стржней с шарнирным закреплением концов (реакция всегда вдоль стержня, но в какую сторону неизвестно). Сила, с которой связь действует на тело, называется силой реакции или просто реакцией. При решении задач статики несвободное тело условно изображают как свободное с помощью, так называемого принципа освобождаемости: всякое несвободное тело можно рассматривать как свободное, если отбросить связи, заменив их реакциями. Направление реакций определяется тем, в каком направлении данная связь препятствует перемещению тела: направление реакции связи противоположно направлению перемещения, уничтожаемого данной связью. Теорема о равновесии трех непараллельных сил. Если свободное твердое тело находится в равновесии под действием трех непараллельных сил, то эти силы лежат в одной плоскости, а линии действия сил пересекаются в одной точке. Аналитическое определение равнодействующей ПССС (метод проекций). проекция равнодействующей на данную ось равна алгебраической сумме проекций слагаемых сил на ту же ось Свойства пар сил Пара, приложенная к ТТ, стремится вызвать его вращение. Вращательное действие пары определяется ее моментом, который равен произведению одной из сил пары на ее плечо, то есть расстояние между линиями действия сил пары: M(P,P′)=P⋅d=P′⋅d Нетрудно убедиться в справедливости следующих утверждений: 1. Сумма проекций сил пары на любую ось равна нулю; 2. Сумма моментов сил пары относительно любой точки равна моменту этой пары. В общем случае действие пары сил на ТТ определяется тремя факторами: 1. плоскостью действия; 2. направлением вращения в этой плоскости; 3. величиной момента. Чтобы однозначно определить все эти факторы, вводят понятие вектор-момента пары.
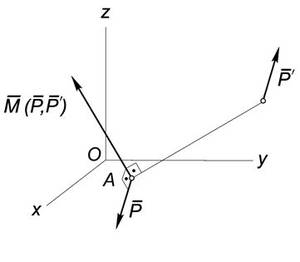
Определение. Вектор-моментом пары сил называется вектор, который: · перпендикулярен плоскости действия пары; · направлен по правилу правого винта; · равен по модулю моменту пары (Рис.1). Нетрудно убедиться, что вектор-момент пары сил можно представить в виде векторных произведений: ММ→(P→,P′→)=AB→×P′→=BA→×P→
Рис.1
15.Сложение пар сил и условие равновесия Теорема о сложении пар сил: Две пары сил, произвольно расположенные в пространстве, эквивалентны одной паре с моментом равным геометрической сумме моментов слагаемых пар. Если на тело действует произвольная система (М1,М2,…,Мn) пар, то вектор момента результирующей пары равен векторной сумме моментов, составляющих пары. M=M1+M2+…+Mn=ΣMk (сверху векторы) Если две пары сил расположены в одной плоскости, то векторы моментов пар направлены перпендикулярно этой плоскости в ту или иную стороны. Поэтому моменты пар можно складывать алгебраически. M=M1+M2+…+Mn=ΣMk Условие равновесия системы пар сил: Для равновесия тела, находящегося под действием системы произвольно расположенных в пространстве пар, необходимо и достаточно, чтобы момент результирующей (эквивалентной) пары был равен 0. M=ΣMk=0 В случае, если все пары сил расположены в одной плоскости (или в параллельных плоскостях), то для равновесия необходимо равенство 0 алгебраической суммы моментов составляющих пар. Рис. 1.4.1 Силы F' и F" взаимно уравновешиваются, и поэтому действие на тело одной данной силы F эквивалентно действию на него системы трех сил F, F ' и F". При этом сила F ' может рассматриваться как сила F, перенесенная параллельно своему начальному направлению в точку О, а силы F" и F образуют пару, которую мы должны присоединить при параллельном переносе силы из точки К в точку О, чтобы сохранить действие силы при этом переносе. Теорема доказана. Пару (F" F), образующуюся при переносе точки приложения силы F, называют присоединенной паро Уравнения равновесия плоской системы сил Всякая система произвольно расположенных в плоскости сил может быть приведена к главному вектору и главному моменту Для равновесия системы сил, произвольно расположенных в плоскости, необходимо и достаточно, чтобы главный вектор и главный момент этих сил относительно любого центра каждый в отдельности равнялся нулю. Главный вектор представляет собой геометрическую сумму всех сил, составляющих систему и перенесенных в центр приведения. Величину главного вектора можно определить через проекции на координатные оси всех сил системы. Для равновесия необходимо, чтобы главный вектор был равен нулю. Кроме того, для равновесия необходимо, чтобы главный момент также был равен нулю. Таким образом, имеем уравнения: ΣPx = 0 (сумма проекций всех сил на ось X равна 0); ΣPy = 0 (сумма проекций всех сил на ось Y равна 0); ΣMo =0 (сумма моментов относительно любой точки равна 0) Данные уравнения являются уравнениями равновесия тела, находящегося под воздействием системы сил, произвольно расположенных в плоскости сил Необходимые и достаточные условия равновесия твердого тела, находящегося под действием произвольной плоской системы сил имеют вид
Из этих уравнений следуют три формы аналитических условий равновесия.
Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы сумма проекций сил на каждую из координатных осей и сумма моментов относительно любой точки, лежащей в плоскости действия сил, были равны нулю.
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех сил относительно каких нибудь двух точек А и В и сумма их проекций на ось Ох, не перпендикулярную прямой АВ, были равны нулю.
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех сил относительно любых трех точек А, В и С, не лежащих на одной прямой, были равны нулю. Для произвольной плоской системы сил каждая форма содержит три уравнения равновесия.
Смятие Довольно часто одновременно со сдвигом происходит смятие боковой поверхности в месте контакта в результате передачи нагрузки от одной поверхности к другой. При этом на поверхности возникают сжимающие напряжения, называемые напряжениями смятия, σсм. Расчет также носит условный характер. Допущения подобны принятым при расчете на сдвиг (см. выше), однако при расчете боковой цилиндрической поверхности напряжения по поверхности распределены не равномерно, поэтому расчет проводят для наиболее нагруженной точки (на рис. 4). Для этого вместо боковой поверхности цилиндра в расчете используют плоскую поверхность, проходящую через диаметр. На рис. 4 показана примерная схема передачи давления на стержень заклепки.
Таким образом, условие прочности при смятии можно выразить соотношением σcм=F/Acм ≤ [σcм], Acм – dδ, где d - диаметр окружности сечения; δ — наименьшая высота соединяемых пластин; Асм — расчетная площадь смятия; допускаемое напряжение смятия: [σcм] = (0,35÷0,4)*σт; F – сила взаимодействия между деталями. Основные понятия статики: материальная точка, свободное, несвободное тело, сила, системы сил. Материальная точка – точка имеющая массу – это не только тело, имеющее очень малые размеры, но и любое тело, размерами которого в условиях данной задачи можно пренебречь.
Свободное тело (воздушный шар в полете)– если никакие другие тела не препятствуют его перемещению в любом направлении, в противном случае – тело несвободное или связанное Сила – мера механического взаимодействия тел (под действием силы F точка А будет перемещаться в направлении движения силы) F= m*a (сила = масса * ускорение). Сила векторная величина, измеряется в Ньютонах. Системы сил – совокупность сил приложенных к одному телу. 3 вида систем: 1) система сходящихся сил, 2) система параллельных сил, 3) система произвольно расположенных сил. Аксиомы статики Аксиома 1. (аксиома инерции) Всякое тело сохраняет свое состояние покоя или прямолинейного равномерного движения, пока какие-нибудь силы не выведут тело из этого состояния. На основании этой аксиомы состоянием равновесия считаем, когда тело находится в покое или движется прямолинейно и равномерно, т.е. по инерции. Аксиома 2. (аксиома взаимодействия) Силы взаимодействия между собой двух тел всегда равны по модулю и направлены по одной прямой в противоположные стороны. Если какая-нибудь система сил обладает таким свойством, что после приложения к свободному телу она не изменяет его механическое состояние, то такая система сил называется уравновешенной. Аксиома 3. (условие равновесия двух сил) Для равновесия свободного твердого тела, находящегося под действием двух сил, необходимо и достаточно, чтобы эти силы были равны по модулю и действовали по одной прямой в противоположные стороны. Аксиома 4. Равновесие (как и любое другое механическое состояние) твердого тела не нарушается, если к нему приложить или удалить систему уравновешенных сил. Аксиома 5. (аксиома параллелограмма) Равнодействующая двух сил, приложенных к телу в одной точке, равна по модулю и совпадает по направлению с диагональю параллелограмма, построенного на данных силах, и приложена в той же точке. Равнодействующая двух сил, приложенных в одной точке, равна их векторной сумме и приложена в той же точке. Ее можно найти построив треугольник сил. 3. Связи. Реакции связей. Принцип освобождаемости от связей и правила определения их реакций. Связями называют ограничения, налагаемые на положения и скорости точек тела в пространстве. Типы связей: гибкая (реакция всегда приложена от тела вдоль нити к точке подвеса), идеально гладкая плоскость (реакция всегда перпендикулярна), связь в виде стржней с шарнирным закреплением концов (реакция всегда вдоль стержня, но в какую сторону неизвестно). Сила, с которой связь действует на тело, называется силой реакции или просто реакцией. При решении задач статики несвободное тело условно изображают как свободное с помощью, так называемого принципа освобождаемости: всякое несвободное тело можно рассматривать как свободное, если отбросить связи, заменив их реакциями. Направление реакций определяется тем, в каком направлении данная связь препятствует перемещению тела: направление реакции связи противоположно направлению перемещения, уничтожаемого данной связью.
Система сходящихся сил. Силовой многоугольник. Система сил, линии действия которых, лежат в одной плоскости и все пересекаются в одной точке, называется плоской системой сходящихся сил. ПССС в общем случае эквивалентна равнодействующей, которая равна векторной сумме этих сил; линия действия равнодействующей проходит через точку пересечения линий действия составляющих. Сторона соединяющая начало первого с концом последнего вектора, называется замыкающей стороной. Силовой многоугольник может быть замкнутым и незамкнутым. Равнодействующая системы сходящихся сил, дающих замкнутый силовой многоугольник, равна 0 и, следовательно, эта система эквивалентна 0, т.е. находится в равновесии. Есть два условия равновесия для системы сходящихся сил: геометрическое и аналитическое. Порядок сложения векторов при построении силового многоугольника на величину равнодействующей не влияет т.к. векторная сумма от перемены мест слагаемых не меняется.
|
|||||||||||||
|
|
Последнее изменение этой страницы: 2021-03-09; просмотров: 217; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.11.28 (0.038 с.) |
 1. Основная форма условий равновесия для сил, лежащих в плоскости, совмещенной с плоскостью Оху:
1. Основная форма условий равновесия для сил, лежащих в плоскости, совмещенной с плоскостью Оху: 2. Вторая форма условий равновесия.
2. Вторая форма условий равновесия. 3. Третья форма условий равновесия.
3. Третья форма условий равновесия.


