
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Пспрс. Равновесие пспрс. Условия равновесия
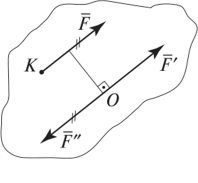
Плоская система произвольно расположенных сил — это система сил, линии действия которых расположены в одной плоскости произвольным образом. Рассмотрим случай переноса силы в произвольную точку, не лежащую на линии действия силы. Теорема. Действие силы на тело не изменится, если ее перенести параллельно самой себе в любую точку тела, присоединяя при этом некоторую пару сил. Доказательство. Пусть к телу в некоторой точке К приложена сила F (рис. 1.4.1). Перенесем в произвольную точку О того же тела силу F = F' параллельно данной силе. Но чтобы равновесие не изменилось, к точке О надо приложить равную по величиной противоположно направленную_силу F" (см. рис. 1.4.1).
Рис. 1.4.1 Силы F' и F" взаимно уравновешиваются, и поэтому действие на тело одной данной силы F эквивалентно действию на него системы трех сил F, F ' и F". При этом сила F ' может рассматриваться как сила F, перенесенная параллельно своему начальному направлению в точку О, а силы F" и F образуют пару, которую мы должны присоединить при параллельном переносе силы из точки К в точку О, чтобы сохранить действие силы при этом переносе. Теорема доказана. Пару (F" F), образующуюся при переносе точки приложения силы F, называют присоединенной паро Уравнения равновесия плоской системы сил Всякая система произвольно расположенных в плоскости сил может быть приведена к главному вектору и главному моменту Для равновесия системы сил, произвольно расположенных в плоскости, необходимо и достаточно, чтобы главный вектор и главный момент этих сил относительно любого центра каждый в отдельности равнялся нулю. Главный вектор представляет собой геометрическую сумму всех сил, составляющих систему и перенесенных в центр приведения. Величину главного вектора можно определить через проекции на координатные оси всех сил системы. Для равновесия необходимо, чтобы главный вектор был равен нулю. Кроме того, для равновесия необходимо, чтобы главный момент также был равен нулю. Таким образом, имеем уравнения: ΣPx = 0 (сумма проекций всех сил на ось X равна 0); ΣPy = 0 (сумма проекций всех сил на ось Y равна 0); ΣMo =0 (сумма моментов относительно любой точки равна 0) Данные уравнения являются уравнениями равновесия тела, находящегося под воздействием системы сил, произвольно расположенных в плоскости сил
Необходимые и достаточные условия равновесия твердого тела, находящегося под действием произвольной плоской системы сил имеют вид
Из этих уравнений следуют три формы аналитических условий равновесия.
Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы сумма проекций сил на каждую из координатных осей и сумма моментов относительно любой точки, лежащей в плоскости действия сил, были равны нулю.
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех сил относительно каких нибудь двух точек А и В и сумма их проекций на ось Ох, не перпендикулярную прямой АВ, были равны нулю.
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех сил относительно любых трех точек А, В и С, не лежащих на одной прямой, были равны нулю. Для произвольной плоской системы сил каждая форма содержит три уравнения равновесия.
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-03-09; просмотров: 393; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.227.69 (0.007 с.) |
 1. Основная форма условий равновесия для сил, лежащих в плоскости, совмещенной с плоскостью Оху:
1. Основная форма условий равновесия для сил, лежащих в плоскости, совмещенной с плоскостью Оху: 2. Вторая форма условий равновесия.
2. Вторая форма условий равновесия. 3. Третья форма условий равновесия.
3. Третья форма условий равновесия.


