
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Виды фильтров пространственной обработки изображенийСодержание книги
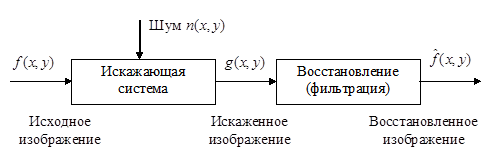
Поиск на нашем сайте В общем случае схему искажения и восстановления (фильтрации) изображений можно представить в виде, изображенном на рисунке 2.1.
Рисунок 2.1 - Схема искажения и восстановления изображений
Целью восстановления искаженного изображения Тогда ошибка оценивания в каждой точке изображения определяется выражением:
а средняя квадратичная ошибка (СКО) - через ее квадрат, то есть дисперсию ошибки:
Критерий минимума квадрата СКО ( Указанный критерий является конструктивным и позволяет теоретически рассчитывать оптимальные (дающие минимум квадрата СКО) алгоритмы фильтрации при рассмотренной модели наблюдения изображения Еще одним широко распространенным на практике критерием эффективности обработки изображений является связанный с рассмотренным критерий максимума пикового отношения сигнал-шум (ПОСШ) [25]:
Фильтры, основанные на порядковых статистиках Фильтры, основанные на порядковых статистиках, относятся к классу нелинейных пространственных фильтров. Отклик такого фильтра определяется предварительным упорядочиванием (ранжированием) значений пикселей, покрываемых маской фильтра, и последующим выбором значения, находящегося на определенной позиции упорядоченной последовательности (то есть имеющего определенный ранг). Собственно фильтрация сводится к замещению исходного значения пикселя (в центре маски) на полученное значение отклика фильтра. Наиболее известен медианный фильтр, который, как следует из названия, заменяет значение пикселя на значение медианы распределения яркостей всех пикселей в окрестности (включая и исходный) [22].
Чтобы выполнить медианную фильтрацию для элемента изображения, необходимо сначала упорядочить по возрастанию значения пикселей внутри окрестности, затем найти значение медианы, и, наконец, присвоить полученное значение обрабатываемому элементу. Так, для окрестности Необходимо отметить, что дисперсия медианы белого шума на выходе медианного фильтра определяется выражением [24]:
где Равенство (2.1-6) показывает также, что для нормального белого шума дисперсия медианы приблизительно на Характерной особенностью медианного фильтра, отличающей его от рассмотренных выше фильтров, является сохранение перепадов яркости (контуров) без искажений. При этом если перепады яркости велики по сравнению с дисперсией аддитивного белого шума, то медианный фильтр дает меньшее значение СКО по сравнению с оптимальным линейным фильтром [22]. Особенно эффективны медианные фильтры при фильтрации импульсных шумов, которые выглядят как наложение на изображение случайных черных и белых точек (с соответствующими вероятностями Можно сказать, что основная функция медианного фильтра заключается в замене отличающегося от фона значения пикселя на другое, более близкое его соседям. На самом деле, изолированные темные или светлые (по сравнению с окружающим фоном) кластеры, имеющие площадь не более чем Хотя медианный фильтр значительно более распространен в обработке изображений, чем остальные виды фильтров, основанные на порядковых статистиках, тем не менее, он не является единственным. Медиана представляет собой 50-й процентиль упорядоченного набора чисел, но, как следует из основ статистики, упорядочивание предоставляет много других возможностей. Например, использование 100-го процентиля приводит к так называемому фильтру максимума,который полезен при поиске на изображении наиболее ярких точек по отношению к окружающему фону. Процентиль 0 является фильтром минимума,используемым для поиска противоположных значений [22]. В работе [24] был предложен псевдомедианный фильтр, который обладает многими свойствами медианного фильтра, но требует меньших вычислительных затрат с увеличением размера апертуры.
где
Медианные фильтры хорошо работают до тех пор, пока пространственная плотность импульсного шума невелика (эмпирическое правило - Подобно всем рассмотренным до сих пор фильтрам, модифицированный медианный фильтр осуществляет обработку в прямоугольной окрестности Алгоритм модифицированной медианной фильтрации состоит из двух ветвей, обозначенных ниже как ветвь А и ветвь Б, и его действие заключается в следующем.
Ветвь А: если иначе результат равен Ветвь Б: если иначе результат равен
где Значения С учетом этого, ветвь А алгоритма преследует цель определить, является ли медиана Сохранение значений в таких точках «промежуточного уровня» яркости минимизирует искажения, вносимые обработкой изображения. Если условие После получения значения обрабатываемого элемента изображения, центр окрестности смещается в позицию следующего элемента. Алгоритм инициализируется вновь и применяется к пикселям внутри окрестности · Фильтры, основанные на выборе максимального и минимального значений. Хотя медианные фильтры, безусловно, принадлежат к числу наиболее используемых в обработке изображений фильтров, основанных на порядковых статистиках, это отнюдь не единственный пример таких фильтров. Медиана представляет собой 50-ый процентиль упорядоченного набора чисел, однако использование иных статистических характеристик представляет много других возможностей. Например, использование 0-го процентиля приводит к фильтру, основанному на выборе минимального значения (минимальному фильтру), который задается выражением:
Такой фильтр полезен при обнаружении наиболее темных точек на изображении. Кроме того, применение этого фильтра приводит к уменьшению униполярного «белого» импульсного шума вследствии операции выбора минимума. Использование же 100-го процентиля приводит к фильтру, основанному на выборе максимального значения (максимальному фильтру):
Такой фильтр полезен при обнаружении наиболее ярких точек на изображении. Кроме того, поскольку униполярный «черный» импульсный шум принимает минимальные значения, применение этого фильтра приводит к уменьшению этого шума, так как в процессе фильтрации из окрестности
|
||
|
|
Последнее изменение этой страницы: 2020-03-13; просмотров: 422; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.89.201 (0.008 с.) |

 является получение из него при помощи некоторой обработки изображения
является получение из него при помощи некоторой обработки изображения  , которое было бы близко к исходному изображению
, которое было бы близко к исходному изображению  по заданному критерию. Получающееся в результате обработки изображение
по заданному критерию. Получающееся в результате обработки изображение  ,
, .
. ) является наиболее универсальным и распространенным на практике критерием качества восстановления при проектировании алгоритмов фильтрации изображений. Однако, этот критерий имеет недостаток, заключающийся в том, что он не всегда согласуется с субъективным критерием качества.
) является наиболее универсальным и распространенным на практике критерием качества восстановления при проектировании алгоритмов фильтрации изображений. Однако, этот критерий имеет недостаток, заключающийся в том, что он не всегда согласуется с субъективным критерием качества. . Однако оптимальные алгоритмы оказываются сложными для расчета и реализации. Поэтому в автоматизированных системах обработки изображений предпочтение отдается так называемым квазиоптимальным алгоритмам, которые дают минимум квадрата СКО в некотором классе алгоритмов с заданной структурой и незначительно отличаются от оптимальных по этому критерию.
. Однако оптимальные алгоритмы оказываются сложными для расчета и реализации. Поэтому в автоматизированных системах обработки изображений предпочтение отдается так называемым квазиоптимальным алгоритмам, которые дают минимум квадрата СКО в некотором классе алгоритмов с заданной структурой и незначительно отличаются от оптимальных по этому критерию. .
. .
. элементов медианой будет пятое значение по величине, для окрестности
элементов медианой будет пятое значение по величине, для окрестности  - тринадцатое значение, и так далее. Если несколько элементов в окрестности имеют одинаковые значения, эти значения будут сгруппированы.
- тринадцатое значение, и так далее. Если несколько элементов в окрестности имеют одинаковые значения, эти значения будут сгруппированы.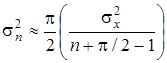
 - размер апертуры.
- размер апертуры. больше, чем дисперсия для среднего. Следовательно, скользящее усреднение подавляет нормальный белый шум несколько лучше, чем медианный фильтр с такой же апертурой. Иначе говоря, чтобы медианный фильтр давал ту же дисперсию шума, что и скользящее усреднение в его апертуре должно быть на 57% больше точек [22].
больше, чем дисперсия для среднего. Следовательно, скользящее усреднение подавляет нормальный белый шум несколько лучше, чем медианный фильтр с такой же апертурой. Иначе говоря, чтобы медианный фильтр давал ту же дисперсию шума, что и скользящее усреднение в его апертуре должно быть на 57% больше точек [22]. и
и  ) [22].
) [22]. (половина площади маски фильтра), будут удалены медианным фильтром с маской размерами
(половина площади маски фильтра), будут удалены медианным фильтром с маской размерами  . В данном случае «удалены» означает, что значения пикселей в соответствующих точках будут заменены на значения медиан по окрестностям. Кластеры больших размеров искажаются значительно меньше [22].
. В данном случае «удалены» означает, что значения пикселей в соответствующих точках будут заменены на значения медиан по окрестностям. Кластеры больших размеров искажаются значительно меньше [22]. ,
, - оператор псевдомедианной фильтрации, действующий следующим образом. Пусть
- оператор псевдомедианной фильтрации, действующий следующим образом. Пусть  - последовательность элементов
- последовательность элементов  , тогда псевдомедиана такой последовательности определяется так:
, тогда псевдомедиана такой последовательности определяется так: ,
, ,
, ,
, .
. и
и  не превышают 0.2). Модифицированная медианная фильтрация [22] помогает справиться с импульсным шумом, вероятности которого превышают указанные значения. Дополнительное преимущество такого модифицированного медианного фильтра состоит в том, что такой фильтр «старается сохранить детали» в областях, искаженных не импульсным шумом. Обычный медианный фильтр таким свойством не обладает.
не превышают 0.2). Модифицированная медианная фильтрация [22] помогает справиться с импульсным шумом, вероятности которого превышают указанные значения. Дополнительное преимущество такого модифицированного медианного фильтра состоит в том, что такой фильтр «старается сохранить детали» в областях, искаженных не импульсным шумом. Обычный медианный фильтр таким свойством не обладает. [22] в соответствии с приведенными ниже условиями.
[22] в соответствии с приведенными ниже условиями. , перейти к ветви Б;
, перейти к ветви Б; .
. , результат равен
, результат равен  ,
, - минимальное значение яркости в
- минимальное значение яркости в  - максимальное значение яркости в
- максимальное значение яркости в  .
. импульсом («черным» или «белым») или нет. Если условие выполнено
импульсом («черным» или «белым») или нет. Если условие выполнено  , то в силу указанных в предыдущем абзаце причин
, то в силу указанных в предыдущем абзаце причин  не может быть импульсом. В этом случае осуществляется переход к ветви Б и проверяется, является ли импульсом значение
не может быть импульсом. В этом случае осуществляется переход к ветви Б и проверяется, является ли импульсом значение  выполнено, то значение
выполнено, то значение  нарушено, то либо
нарушено, то либо  , либо
, либо  . В обоих случаях значение является экстремальным, и алгоритм дает на выходе значение медианы
. В обоих случаях значение является экстремальным, и алгоритм дает на выходе значение медианы  .
. .
. выбирается максимальное значение.
выбирается максимальное значение.


