Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Многопроцессорные средства переработки информацииСодержание книги
Поиск на нашем сайте
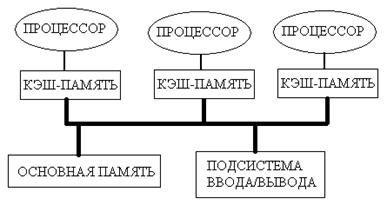
Как указывалось выше, в системах управления, работающих в режиме реального времени, на принятие решения часто отводится весьма мало времени. Характерным для систем управления также является параллельность протекания процессов, что, в свою очередь, вызывает необходимость организации параллельных вычислений. Появление быстродействующих микропроцессоров позволяет обеспечить параллельные вычисления при применении мультимедийного режима работы. Но задачи автоматизации растут, объёмы вычислений также существенно увеличиваются, таким образом, даже современный процессор порой не может справиться с поставленной задачей. Как показывают исследования, большинство задач обработки сигналов в реальном масштабе времени могут быть сведены к набору операций над матрицами. В настоящее время созданы пакеты программ, основанные на вычислительных методах линейной алгебры, позволяющие решить эти задачи. Однако решить их в режиме реального времени не удастся даже на мощном и быстродействующем компьютере. Решить их можно, используя только параллелизм вычислений. К недостаткам однопроцессорных систем следует отнести также высокую стоимость высокоскоростных процессоров. В связи с этим в настоящее время находят применение многопроцессорные системы. Например, в корпоративных вычислительных сетях стали применять двух- и четырёхпроцессорные ЭВМ, построенные на базе микропроцессоров i486 и Pentium, что позволило отказаться от мини-ЭВМ и меинфреймов. Следует также отметить, что все методы построения многопроцессорных систем предусматривают использование недорогих процессоров, что, как правило, приводит к снижению стоимости системы. Методов построения многопроцессорных систем весьма много, ниже рассмотрены наиболее распространённые. Многопроцессорная система с общей шиной (рис.3.7). Все устройства подсоединены параллельно к одной системной шине, и любой из процессоров может, используя её, обратиться к любому устройству. Поскольку массив информации содержит адрес устройства, информация будет принята нужным устройством.
Такая структура возможна, поскольку процессор только на сравнительно короткое время занимает системную шину, основное время он занят обработкой информации. Для исключения столкновений при одновременном обращении нескольких процессоров к системной шине предусматривается устройство (“арбитр”) обеспечивающее очерёдность использования шины. Максимальное число процессоров, которое можно включить в систему, определяется соотношением скоростей работы процессора и системной шины. Как указывалось выше, в современных микропроцессорах тактовая частота работы процессора превышает тактовую частоту системной шина в 2-4 раза, что снижает эффективность данного метода построения многопроцессорных систем (при большом числе процессоров или медленнодействующей системной шине определять быстродействие системы будет пропускная способность шины). Структурная схема многопроцессорной системы с перекрёстной коммутацией. На рис.3.8. представлена многопроцессорная система с перекрёстной коммутацией, на которой точками показаны бесконтактные переключатели системной шины. Эта структура позволяет подсоединить любой процессор к любому блоку памяти или к любому устройству обмена, а через него и к любому устройству. Между любыми двумя устройствами устанавливается физическая связь, причём одновременно может быть установлено несколько путей передачи информации. Это позволяет уменьшить задержки при обмене информацией, по сравнению с шинной структурой. К достоинствам данного принципа построения системы является то, что возможны вариантные маршруты обмена информацией, если по какой-то причине нельзя использовать основной (какие-то участки шины заняты другими процессорами или участок шины неисправен).
МП – микропроцессор, БП – блок памяти, УО – устройства обмена, О1, О2, О3 – объекты К недостаткам этого принципа построения многопроцессорной системы следует отнести большое число коммутаторов. Система с конвейерной обработкой данных. Обычная однопроцессорная ЭВМ поочерёдно выбирает команду из памяти, дешифрирует и выполняет её. Таким образом, время выполнения алгоритма, содержащего K команд, будет равно tср´ K, где tср – среднее время считывания, дешифрации и выполнения команды.
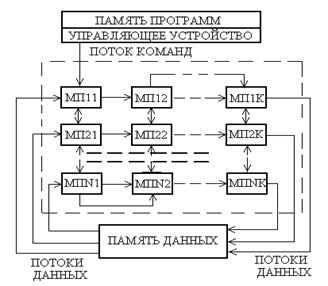
В конвейерной многопроцессорной системе каждый процессор выполняет одну и ту же команду (или несколько команд) над последовательностью данных, проходящих через систему. Скорость обработки информации увеличится в d´ K раз (d – коэффициент, учитывающий ускорение обработки, поскольку не требуется считывать очередную команду и её дешифрировать, d> 1). Системы с конвейерной обработкой получили название – много команд и один поток данных (МКОД). Конвейерная обработка эффективна только тогда, когда загрузка конвейера близка к полной, а скорость подачи новых операндов соответствуют максимальной производительности конвейера. Наиболее мощный из построенных к концу прошлого века конвейеров является конвейер многопроцессорной системы Cyto Computer, специализированный на обработке изображений. Он содержит 113 довольно простых микропроцессоров. Система с матричной структурой (рис.3.10). Эта система содержит большое число сравнительно простых микропроцессоров, соединённых между собой так, что они образуют матрицу. Показанная на рис.3.10 система предусматривает, что все процессоры одновременно выполняют одну и ту же команду (допускается пропуск выполнения команды отдельными процессорами), но над разными потоками данных. Такие системы называются «один поток команд и множество потоков данных – ОКМД». Микропроцессоры в матрице тоже могут соединяться по-разному: – каждые процессор соединён с четырьмя соседними по горизонтали и вертикали; – процессоры соединяются с соседними процессорами по диагонали; – каждый процессор соединён с шестью соседними процессорами. Кроме того, каждый процессор соединён с общей памятью (на рис.3.10 не показано) и с памятью соседних процессоров.
Такие большие матричные системы возможны только благодаря тому, что каждый процессор выполнен настолько простым, на сколько это только возможно, и все они выполняют одну и ту же команду (необходим только один контроллер). Чаще всего для подобных систем используются одноразрядные микропроцессоры. При этом каждый процессор нуждается в сравнительно небольшом объёме памяти (от 32 до 4096 бит на процессор). Таким образом, матричная система требует значительно меньше памяти по сравнению с однопроцессорной системой, имеющей такую же производительность. Возможна также структура матричной системы, в которой каждый столбец микропроцессоров получает свой поток команд (множество потоков команд – множество потоков данных – МКМД). Вопрос 22
|
||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 419; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.169 (0.007 с.) |