Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Характеристики СМ при несинхронной скорости вращения.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Рассмотрим основные соотношения между параметрами режима системы, которая состоит из синхронной машины, вращающейся с постоянной скоростью w отличной от синхронной, и шин неизменного по величине и частоте w0 напряжения. Схема исследуемой системы показана и векторная диаграмма показаны на рис. Здесь предполагается, что при некотором значении угла d=d0 скорость вращения вектора E изменяется и становится равной w вместо w0. Модуль вектора Ew=E(w); угол d=d0+Dd. Здесь Dd = - stw0, где s — скольжение, определяемое как
Задача получения статических характеристик мощности при несинхронной работе генератора, сводится к определению токов, мощностей и электромагнитных моментов. Для синхронной машины 1, связанной с шинами U, схема замещения имеет вид, показанный на рис. 14.12, в, где согласно методу наложения
где Мощности в начале и конце передачи будут найдены как
При определении э.д.с. Ew предполагается, что появившиеся при независимом возбуждении и возникающие в результате скольжения дополнительные (наведенные) токи учтены в условной асинхронной машине 2; тогда Ew=w*E. Если ток возбуждения получается от возбудителя и подвозбудителя, сидящих на одном валу с генератором, то Ew=w*3E.
В общем случае можно записать Ew=w*nE. С учетом этого
После преобразования получим
где При этом электромагнитный момент синхронной машины M1=P1/w* или
Характеристики СМ при несинхронной скорости вращения.
Здесь первое слагаемое момента, иногда называемое собственным моментом M11 получается при взаимодействии обмотки ротора, питаемой э.д.с. E, и обмотки статора, замкнутой на сопротивление rw. В простейшем случае при n=1 собственный момент
Формула по своей структуре аналогична известной формуле момента асинхронного двигателя. Пои s=0 член M11 превращается в так называемую собственную мощность P11=(E2/z)sina. Второе слагаемое в выражении (*) называется взаимным моментом; при s=0 он превращается во взаимную мощность P12. Мнимая часть комплекса
Тогда значения активной и реактивной мощностей можно записать так
где r=r/x; aw=arctg[r/(w*x)]. Асинхронный момент. Найдем теперь величину электромагнитного момента M2, развиваемого условно выделенной машиной 2 (рис. 14.12,а), которую при отрицательном скольжении считаем генератором, а при положительном — двигателем. Если предположить, что на роторе генератора Г имеется только одна обмотка возбуждения, выполненная как равномерно распределенная, то электромагнитный момент
Здесь x1 и r —параметры схемы замещения асинхронного двигателя, включающие внешнее сопротивление zвн. Переходя от параметров асинхронного двигателя к параметрам синхронного генератора и заменяя x1=x’dxd/(xd-x’d); x1/r=T’d, получаем
Асинхронные режимы в ЭЭС Очень важное значение имеют режимы работы электрических систем при больших отклонениях скорости вращения роторов генераторов или двигателей от синхронной. К таким режимам, например, относятся: работа синхронной машины на шины, где частота отлична от частоты этой машины, ресинхронизация после нарушения устойчивости, самосинхронизация генераторов, автоматическое повторное включение с самосинхронизацией или без контроля синхронизма, асинхронный пуск двигателей и компенсаторов, самозапуск двигателей. Все эти режимы, по различным причинам возникающие в системе, называются асинхронными. Для асинхронных режимов характерно периодическое изменение вектора э.д.с. хотя бы одной станции системы на угол, больший 360°. Эта станция называется работающей или идущей асинхронно. На рис. 14.1,а показано, как меняется положение вектора э.д.с. E одной из станций системы при больших качаниях, когда вектор перемещается из положения 1 в положение 2, и при асинхронном ходе этой станции, когда из положения 1 вектор перемещается в положение 3, «обогнав» вектор напряжения U. На рис. 14.1 ,б,в показано, что мощность синхронной машины, обусловленная ее возбуждением, меняется в зависимости от угла и времени примерно по синусоидальному закону.
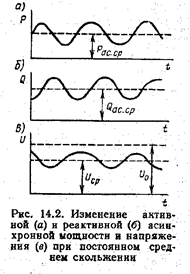
При асинхронном ходе и скорости больше синхронной генератор, работая как асинхронный, выдает активную мощность, которая называется асинхронной. Если бы генератор был идеально симметричен, то асинхронная мощность при данном скольжении была бы постоянной. Наличие несимметрии (явнополюсность, одноосная обмотка возбуждения и т. д.) приводит к тому, что асинхронная мощность пульсирует около некоторого среднего значения — средней асинхронной мощности (рис. 14.2).
Асинхронные режимы в ЭЭС Средняя асинхронная мощность зависит от типа и конструкции генератора и от величины среднего скольжения (рис. 14.3). Во время асинхронного хода изменяется не только мощность P, но и токи статора I и ротора IВ, а также результирующее потокосцепление обмотки возбуждения — э.д.с. E’q. Э.д.с. Eq и E’q пульсируют около некоторого среднего значения. В первом приближении можно считать, что в начале установившегося асинхрон ного режима ток, активная и реактивная мощности определяются значением э.д.с. Eq исходного режима, если выпадение из синхронизма генератора, не имеющего регулятора возбуждения, происходило медленно. Если генератор имеет регулятор возбуждения, поддерживающий постоянство результирующего потокосцепле-ния с обмоткой возбуждения, или выпадение произошло в результате резкого возмущения (например, короткого замыкания), то можно грубо полагать, что параметры установившегося асинхронного режима определяются э.д.с. E’q0, отвечающей исходному режиму. В сложных электрических системах могут быть два случая, когда из синхронизма на станции одновременно выходят несколько генераторов или несколько станций. При анализе вся эта группа генераторов заменяется одним эквивалентным. Такая замена может быть сделана довольно приближенно при соблюдении ряда условий и, прежде всего при условии, что параметры всех объединяемых генераторов и их удаленность от узловой точки примерно одинаковы. Постоянная инерции эквивалентного генератора в этом случае находится, как обычно, суммированием приведенных к базисной мощности постоянных инерции отдельных генераторов. Момент эквивалентного генератора принимается равным сумме моментов объединяемых генераторов. Существенное влияние на асинхронный ход оказывает регулятор скорости. Для регулятора скорости эквивалентного генератора рекомендуется принять средневзвешенное значение соответствующих параметров серводвигателей и регуляторов, установленных на эквивалентируемых генераторах: эквивалентная постоянная серводвигателей
эквивалентный коэффициент неравномерности
Причины появления асинхронного режима генератора или части системы могут быть весьма различными. Его может вызвать исчезновение возбуждения, нарушение динамической устойчивости после резкого возмущения или нарушение статической устойчивости сильно перегруженной системы при малом возмущении.
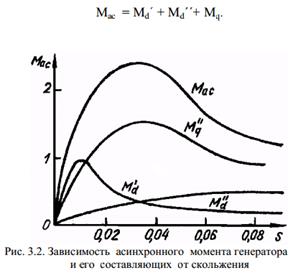
Результирующая устойчивость Характеризует способность системы самопроизвольно восстанавливать синхронную работу после кратковременного нарушения устойчивости. Если выпавшая из синхронизма система после устранения причины нарушения устойчивости вновь втягивается в синхронизм, то считают, что система с подключенными к ней генераторами обладает результирующей устойчивостью. При расчете переходных процессов, вызванных нарушением устойчивости, пользуются понятиями асинхронного режима и асинхронного момента. Асинхронным называется режим работы системы при больших отклонениях частоты вращения роторов генераторов или двигателей от синхронной частоты. Выпадение генератора из синхронизма сопровождается резким повышением частоты вращения ротора. При асинхронном ходе и частоте, большей чем синхронная, генератор работает как асинхронный и генерирует активную мощность, которая называется асинхронной. Причинами появления асинхронного режима могут быть: исчезновение тока возбуждения, нарушение динамической устойчивости после резкого возмущения, нарушение статической устойчивости сильно перегруженной системы при слабом возмущении. Возникновение асинхронного режима приводит к различным нарушениям нормальной работы СЭС: могут появляться периодические понижения напряжения, при которых затормаживаются двигатели и отключаются пускатели в сети напряжением 0,4 кВ, а также понижается устойчивость параллельной работы генераторов в синхронно работающих частях ЭЭС; из-за снижения напряжения и увеличения тока может нарушаться селективная работа релейной защиты, возникают колебания активной мощности, при которых появляется знакопеременный момент на валу турбины, приводящий к дополнительным механическим усилиям, возможно возникновение резонансных колебаний, опасных для оборудования и синхронной работы частей ЭЭС. При наличии между отдельными частями ЭЭС большого активного сопротивления увеличивается дефицит активной мощности в приемной части системы. В асинхронном режиме генератор кроме момента, обусловленного его возбуждением, развивает еще и асинхронный момент под действием свободных токов, которые возникают в его обмотке возбуждения и демпферных контурах из-за движения ротора по отношению к полю, созданного внешними эдс. Наличие несимметрии генератора, явнополюсность, одноосность обмотки возбуждения и т.д. приводят к тому, что его асинхронная мощность пульсирует около некоторого среднего значения. Аналогично изменяются реактивная мощность и напряжение. Таким образом, асинхронный момент генератора может быть представлен в виде двух составляющих: среднего асинхронного момента и знакопеременного. Первый зависит от типа и конструкции генератора, а также от среднего скольжения, второй не оказывает существенного влияния на протекание асинхронного режима, и им в расчетах пренебрегают. Средний асинхронный момент генератора, подключенного непосредственно к шинам неизменного напряжения, имеет три составляющие, которые обусловлены действием обмотки возбуждения, а также демпферных продольной и поперечной обмоток (рис.3.2):
Результирующая устойчивость
|
||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 580; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.95 (0.012 с.) |









 (*)
(*) , где w* = 1 - s.
, где w* = 1 - s. , т. е.
, т. е.  , дает реактивную мощность
, дает реактивную мощность где
где 



 Для больших качаний в отличие от асинхронного хода характерен провал в зависимости P=f(t) появляющийся при переходе угла за 90°. Для асинхронного хода характерно именно периодическое изменение знака синхронной мощности (рис. 14.1, в).
Для больших качаний в отличие от асинхронного хода характерен провал в зависимости P=f(t) появляющийся при переходе угла за 90°. Для асинхронного хода характерно именно периодическое изменение знака синхронной мощности (рис. 14.1, в).