Динамические характеристики систем управления с ПИД-регулятором.
Содержание книги
- Триодные и диодные тиристоры. Назначение, принцип действия.
- Технологические процессы как объекты автоматического управления. Возмущения, управляющие воздействия, входы и выходы. Обобщенная структурная схема.
- Связь компьютера с периферийными устройствами
- Электромагнитные измерительные преобразователи.
- Линейные и нелинейные САУ. Методы линеаризации статических характеристик нелинейных объектов.
- Классификация ПЛК. Моноблочные контроллеры. Модульные контроллеры. PC-base контроллеры.
- Емкостные электромеханические преобразователи
- Статические и астатические объекты управления.
- Математическое и программное обеспечение АСУТП
- Алгебраические критерии устойчивости Рауса-Гурвица.
- Классификация измерительных преобразователей температуры.
- Астатические объекты управления. Динамические характеристики.
- Расходомеры постоянного перепада давления. Принцип действия, область применения.
- Структурная схема САУ с обратной связью. Назначение элементов.
- Человеко-машинный интерфейс как элемент системы управления.
- Тиристоры. Вольт-амперные характеристики тиристоров.
- Устойчивость систем управления. Теорема Ляпунова для линейных систем.
- Проектирование щитов и стоек.
- Волновые, акустические и радиоизотопные измерительные преобразователи уровня.
- Интегрированные системы управления.
- Чувствительность, точность и погрешности измерительных преобразователей.
- Сглаживающие фильтры. Стабилизаторы напряжения.
- Комбинированный (замкнуто-разомкнутый) принцип регулирования.
- Системы автоматического контроля.
- Оптоэлектронные полупроводниковые и интегральные приборы и устройства.
- Динамические характеристики систем управления с ПИД-регулятором.
- Внешние электрические и трубные проводки.
- Выбор способа выполнения электропроводок
- Основные принципы стандартизации
- Теоретическая база стандартизации
- Логические цифровые устройства на интегральных схемах.
- Принцип действия этих расходомеров основан на изменении потенциальной энергии измеряемого вещества (жидкость, газ, пар, воздух) при протекании через искусственно суженное сечение трубопровода.
- Принципиальная схема симметричного триггера на биполярных транзисторах.
- Тензорезисторные преобразователи. Принцип действия, назначение.
- Принцип действия и назначение оптоэлектронной пары.
- Типовые законы регулирования.
- Классификация, функции и характеристики сетевых адаптеров.
- Методы измерений влажности воздуха и газов.
- Динамические характеристики астатических объектов.
- Характеристики кабелей, применяемых в компьютерных сетях.
- Компенсационные измерительные схемы.
- Классификация исполнительных механизмов.
- Устойчивость САУ. Амплитудно-фазовой критерий Найквиста.
- Индукционные расходомеры. Принцип действия, область применения.
- Методы организации доступа к линиям связи
- Акустические уровнемеры. Принцип действия, область применения.
- Электромагнитные исполнительные механизмы.
- Передаточная функция и частотные характеристики усилительного звена.
- Измерительные преобразователи (датчики)
- Передаточная функция и частотные характеристики апериодического звена 1-го порядка.
Динамическая характеристика объекта показывает, как регулируемая величина в результате регулирующего воздействия изменяется во времени. Изменение регулируемой величины зависит от свойств объекта и от характера возмущения. Наихудшие условия для регулирования имеют место при скачкообразном возмущении. Поэтому параметры объекта принято определять по динамической характеристике, представляющей собой изменение регулируемой величины во времени при скачкообразном изменении положения регулирующего органа. Такая характеристика называется переходной характеристикой объекта или характеристикой разгона.
1.Переходная характеристика – это реакция системы на единичное ступенчатое воздействие (скачок).
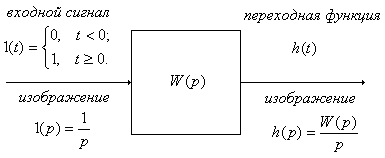
1(t) – функция Хевисайда.
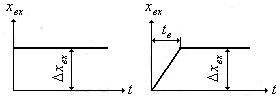
Рисунок 1 – Виды испытательных воздействий: а – скачок;
б – «реальный скачок».
1. Весовая или импульсная переходная характеристика – это реакция системы на единичный импульс.
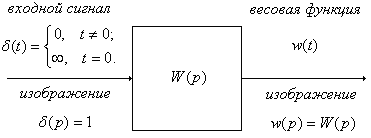  - функция Дирака. - функция Дирака.
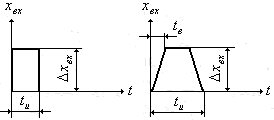
Рисунок 1 – Виды испытательных воздействий: в – прямоугольный импульс;
г – трапецеидальный импульс.
Переход системы от одного установившегося режима к другому при каких-либо входных воздействиях называется переходным процессом. Переходные процессы могут изображаться графически в виде кривой y(t).
Например, процесс нагрева сушильного шкафа до установившегося значения может иметь вид, представленный на рисунке 1.12.
То есть, переходный процесс характеризует динамические свойства системы, ее поведение.
Поскольку входные воздействия могут изменяться во времени, то и переходные характеристики будут каждый раз разные. Для простоты анализа систем входные воздействия приводят к одному из типовых видов (см. рис. 1.13).
| б) d-функция
(дельта-функция,
импульс)
| | г) синусоидальное (гармоническое)
|
В зависимости от вида входного воздействия функция у(t) может иметь разное обозначение:
Переходной характеристикой h(t) называется реакция объекта на единичное ступенчатое воздействие при нулевых начальных условиях, т.е. при х(0) = 0 и у(0) = 0.
Импульсной характеристикой w(t) называется реакция объекта на d-функцию при нулевых начальных условиях.
При подаче на вход объекта синусоидального сигнала на выходе, как правило, в установившемся режиме получается также синусоидальный сигнал, но с другой амплитудой и фазой: y = Aвых*sin(w*t + j), где Aвых - амплитуда, w - частота сигнала, j - фаза.
Динамические характеристики могут быть, вообще говоря, различного вида, но здесь будем рассматривать так называемую кривую разгона - реакцию объекта на скачкообразные изменения входной величины. Из того, как изменяется кривая разгона у(г), т.е. как объект управления "разгоняется" и выходит на новое установившееся значение, видно, как велики в нем запаздывание, инерционность и т.д.
Получить характеристики объекта можно аналитическим методом и экспериментальными методами - активным и пассивным.
Исследование динамических характеристик необходимо для выбора каналов, по которым регулирующие воздействия вносятся наиболее эффективно.
|






