Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Аэродинамические характеристики стабилизатораСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Стабилизатор предназначен для обеспечения продольной устойчивости и балансировки вертолета. Аэродинамические характеристики стабилизатора определяются его подъемной силой Уст = Суст∙r∙V2/2∙Sст, где Суст -коэффициент подъёмной силы стабилизатора, Sст - площадь стабилизатора. Чем больше подъемная сила стабилизатора, тем больше восстанавливающий момент, действующий на вертолет в возмущенном движении. При этом эффективность стабилизатора должна быть одинаковой как на положительных, так и на отрицательных углах атаки. С этой целью профиль стабилизатора выполнен симметричным. На подъемную силу стабилизатора оказывают влияние: угол атаки aст, скорость полета V, площадь Sст. Увеличение угла атаки приводит к положительному приращению подъемной силы, а его уменьшение - к отрицательному. В первом случае стабилизирующий момент действует на пикирование, во втором - на кабрирование. На режиме висения под влиянием индуктивного потока НВ скос потока на стабилизаторе максимальный, подъемная сила Уст будет направлена вниз и создает кабрирующий момент Мкаб. При висении с встречным ветром Мкаб возрастает, при висении с попутным - появляется момент на пикирование. Следовательно, при достаточно большой площади стабилизатора Sст затрудняется процесс балансировки вертолета, особенно с передними центровками− увеличиваются расходы продольного управления. В установившемся полете с поступательной скоростью стабилизатор создает отрицательную подъемную силу и кабрирующий момент. Это обеспечивает балансировку на данном режиме полета. В то же время подъемная сила Уст увеличивается пропорционально V2. При переходе НВ на режим самовращения вертолёт снижается с повышенной вертикальной скоростью. Балансировка вертолёта осуществляется на положительных углах атаки. На стабилизатор начинает действовать воздушный поток снизу, поэтому он создаёт положительную подъёмную силу и момент пикирования. Выводы: I, Эффективность стабилизатора влияет на запасы продольной устойчивости и управляемости. На висении и малых скоростях полета эффективность стабилизатора низка, а с ростом скорости значительно повышается. 2.Для получения приемлемых характеристик устойчивости вертолета на режиме самовращения НВ угол установки стабилизатора выбран −6 º. 3.Площадь стабилизатора обеспечивает необходимые запасы отклонения РЦШ "на себя" на висении с предельно передними центровками и ветром сзади. МОЩНОСТИ НА ВЕРТОЛЕТЕ Для выполнения полета с заданными параметрами требуется определенная мощность силовой установки. Для изменения режима полета и маневрирования требуется запас мощности, т. е. разность между располагаемой и потребной мощностями НВ. Потребной мощностью называется такая мощность, которую необходимо подвести для создания аэродинамической силы НВ, обеспечивающей выполнение заданного режима полета: Nпотр=Nинд+Nпроф+Nдв+Nсж. Nинд - индуктивная мощность, затрачиваемая на преодоление индуктивного сопротивления лопастей (создание индуктивного потока): Nинд=T·Vi=G·Vi, Vi=T/2r·Fн·V. Nпроф - профильная мощность, затрачиваемая на компенсацию профильных потерь реального НВ: Nпроф=Mкр∙wн. З десь Mкр- крутящий момент НВ. Nдв - мощность движения, затрачиваемая на создание пропульсивной силы, преодолевающей вредное сопротивление планера: Ncж - мощность сжатия, затрачиваемая на преодоление волнового сопротивления за счет сжимаемости воздуха. Её необходимо учитывать, начиная со средних скоростей полета ≈ 120 км/час.
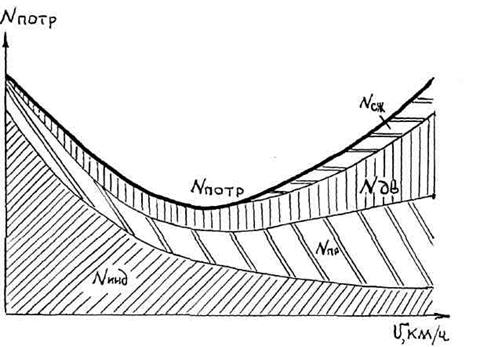
Формулы показывают, что потребная мощность НВ зависит от массы вертолета, высоты и скорости полета. В полете на постоянной высоте и с данной массой потребная мощность изменяется в зависимости от скорости полета следующим образом (рис.5.1):
Рис. 5.1 Зависимость потребной мощности от скорости полета При увеличении скорости до экономической Vэк уменьшается, так как индуктивная мощность Nинд уменьшается интенсивнее, чем увеличиваются остальные составляющие (профильная, движения, сжатия), являющиеся вредными затратами мощности двигателей. При увеличении скорости V>Vэк потребная мощность увеличивается, так как Nинд уменьшается медленнее, чем возрастают вредные затраты мощности. Минимальное значение потребной мощности Nmin соответствует полету на экономической скорости Vэк. Соотношение составляющих потребной мощности в процентном выражении на различных скоростях следующее: При V=0: Nинд(75%) + Nпроф(25%); при Vmax: Nинд(15%) + Nпроф(40%) + Nдв(45%).
Выводы: - На нулевой поступательной скорости наибольшую долю составляет индуктивная мощность. Следовательно, для создания необходимой тяги требуется максимальный шаг НВ, так как НВ работает в осевом потоке. -С увеличением поступательной скорости и, соответственно, косой обдувки НВ, затраты индуктивной мощности уменьшаются, но из-за увеличения потерь НВ становятся больше вредные потери мощности. -Потребная мощность НВ зависит также от массы вертолета и высоты полета. Изменяется пилотом рычагом "шаг-газ". Располагаемой мощностью называется мощность, подводимая к НВ при работе двигателей на данной мощности двигателей вплоть до взлетной. Nр= Nэф −NПОТЕРЬ.. Здесь Nэф − эффективная мощность двигателей; NПОТЕРЬ − мощность потерь, то есть мощность, расходуемая на различные потребители. Мощность потерь представляет собой сумму: Nвс(2,5%)+Nохл(1,15%)+Nтр(3,0%)+Nагр(0,8%)+Nрв(9,5¸6,5), где Nвс - потери на всасывание, затрачиваемые на завихрения во входном тракте двигателей; Nохл - потери на охлаждение, затрачиваемые на вращение вентилятора для охлаждения агрегатов двигателей; Nтр - потери на трение в трансмиссии; Nагр - потери на приводы агрегатов; Nрв - потери на привод РВ. При включении ПОС двигателей возрастают временные потери из-за отбора воздуха с VШ или X ступеней компрессора (3,0¸4,5%). Все виды потерь не зависят от скорости и являются постоянными. Потери на работу рулевого виннта Nрв с ростом скорости уменьшаются из-за работы РВ в условиях косого обтекания. На рис. 5.2 представлена графическая зависимость располагаемой мощности от скорости полета:
Рис.5.2 Зависимость располагаемой мощности от скорости полета
График показывает, что эффективная мощность двигателей Nе практически не изменяется при увеличении скорости. Nр с увеличением скорости незначительно увеличивается за счет снижения потерь на работу РВ. Зная количественное влияние потерь мощности двигателей, можно вывести формулу: Np=ξ·Ne, где ξ - коэффициент использования мощности (ξ=0,83¸0,86), который показывает, какая часть мощности двигателей подводится к НВ, т.е. расходуется на работу несущего винта. Вывод: Зная характер зависимостей Nпотр и Nр от скорости, можно построить совмещенный график мощностей Np, Nпот в зависимости от скорости полёта, c помощью которого определяются запасы мощности на различных скоростях и высотах полета в режиме горизонтального полета: DN=Np-Nпотр. Для вертолета МИ-8 такой совмещенный график рассматривается в разделе «Установившиеся режимы полёта». Контрольные вопросы 1. Какое влияние оказывает на лобовое сопротивление фюзеляжа скорость полета? угол атаки фюзеляжа? 2. Какими способами снижается вредное сопротивление фюзеляжа? 3. Каково назначение стабилизатора? 4. Какие моменты действуют на вертолет со стороны стабилизатора на висении? на повышенных скоростях? на режиме самовращения НВ? 5. Какое влияние на эффективность стабилизатора оказывает угол установки стабилизатора? поступательная скорость?
6. Что понимается под потребной мощностью НВ? Из каких составляющих она складывается?. 7. Как влияет скорость полета на изменение потребной мощности? 8. Что понимается под располагаемой мощностью НВ? Как происходит распределение мощности двигателей на вертолете? 9. Как влияет скорость полета на изменение располагаемой мощности? 10. Что такое баланс мощностей? Определить изменение запаса мощности на вертолете в зависимости от скорости, высоты полета, полетной массы.
ИСПОЛЬЗОВАННАЯ ЛИТЕРАТУРА 1. В.Ф.Ромасевич и Самойлов Г.А. Практическая аэродинамика вертолётов. М: Воениздат.1980. 2. Володко А.М. Основы аэродинамики и динамики полёта вертолётов. М: Транспорт. 1988. 3. Руководство по летной эксплуатации вертолёта Ми-8. М.: Воздушный транспорт, 1988. 4. Практическая аэродинамика вертолёта МИ-8: Методические указания к изучению основ аэродинамики несущего винта и вертолёта. Омск. ОЛТК ГА, 1989. 5. Сборник "Схемы и графики по практической аэродинамике вертолета Ми-8".
|
||||||||||
|
|
Последнее изменение этой страницы: 2017-02-06; просмотров: 1837; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.15 (0.011 с.) |