
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Синтез лінійних систем із мінімальною середньоюСодержание книги
Поиск на нашем сайте
Квадратичною помилкою
Система повинна якомога точніше відтворювати на своєму виході не саму керуючу дію Х(t), а деяку функцію від неї: Z(t) = H(p)X(t). (12.75) У системах, що знаходяться під впливом випадкового (або регулярного) корисного сигналу і випадкового збурення, виникає задача відділення корисного сигналу від перешкоди та фільтрації цієї перешкоди. Цю задачу називають задачею фільтрації або згладжування. Уведення перетворюючого оператора Н(р) узагальнює задачу не тільки на слідкуючі системи, у яких Z(t) = X(t) (тобто Н(Р) = 1), але й на інші класи систем, що виконують різні перетворювання керуючого сигналу. Залежно від вигляду оператора Н(р) задача фільтрації поєднується із задачею відтворювання (якщо Н(р) = const), випередження або екстраполяції, інтегрування, диференціювання тощо. У загальному випадку оператор Н(р) може бути довільним. Через динамічні помилки системи, а також наявність перешкод, вихідний сигнал Y(t) буде відрізнятися від сигналу Z(t). Різницю E(t) = Z(t) – Y(t) (12.76) називають випадковою помилкою системи. Синтез систем при випадкових впливах полягає у визначенні динамічних характеристик системи, що найкращим чином забезпечують виконання деякого статистичного критерію оптимальності. Найчастіше як такий критерій беруть критерій мінімуму середньої квадратичної помилки (див. 12.69):
де e(t) – будь-яка реалізація випадкової помилки. У цьому випадку задача синтезу полягає у тому, щоб знайти таку оптимальну передавальну функцію замкнутої системи Wз.опт.(р), яку можна фізично реалізувати, і при якій середнє значення квадрата помилки
Використання даного статистичного критерію може бути нераціональним у тих випадках, коли вимоги до величини помилки на різні моменти часу неоднакові, але через свою простоту він набув широкого практичного застосування. Способи розв’язування задачі синтезу при випадкових діях можуть бути різними залежно від вигляду графіка спектральної щільності керуючого сигналу і збурення. У найпростішому випадку, коли спектри частот корисного сигналу Sx(w) і збурення Sf(w) не накладаються один на одного (рис. 12.6, а) АЧХ замкнутої системи А(w) вибирають достатньо широкою для забезпечення необхідної точності відтворювання керуючого сигналу й водночас достатньо вузькою, щоб система менше реагувала на перешкоду. Якщо керуючий сигнал має спектр частот, що швидко убуває зі зростанням частоти, а спектр завад є близьким до білого шуму (рис. 12.6, б), то форму АЧХ |W(jw)| розімкнутої системи слід вибирати на низьких частотах, де |W(jw)| >> 1 і де сконцентрована основна енергія керуючого сигналу, якомога близькою до форми спектральної щільності керуючого сигналу Sx(w). У загальному випадку, коли спектри частот корисного сигналу й перешкоди накладаються і мають довільну форму (рис. 12.6, в) визначення оптимальних параметрів системи стає достатньо складним.
Під час синтезу систем із випадковими впливами розрізняють два види задач: - синтез при заданій структурі системи керування, коли намагаються досягти мінімуму середньої квадратичної помилки за рахунок вибору оптимальних параметрів коректувальних ланок системи на підставі відомих статистичних характеристик корисного сигналу і збурення; - синтез при довільній структурі системи керування, коли за відомими статистичними характеристиками корисного сигналу і збурення визначають оптимальну структуру і параметри системи, що забезпечують мінімум середньої квадратичної помилки.
|
||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 234; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.62.86 (0.005 с.) |

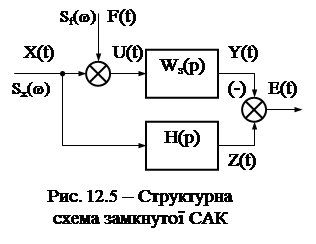 Розглянемо систему автоматичного керування з передавальною функцією Wз(р), яка слугує для підсилення й перетворення керуючого корисного сигналу Х(t) за наявності випадкового збурення F(t). Це перетворення у загальному випадку виконується відповідно до деякого заданого алгоритму перетворення H(p) (рис. 12.5).
Розглянемо систему автоматичного керування з передавальною функцією Wз(р), яка слугує для підсилення й перетворення керуючого корисного сигналу Х(t) за наявності випадкового збурення F(t). Це перетворення у загальному випадку виконується відповідно до деякого заданого алгоритму перетворення H(p) (рис. 12.5). (12.77)
(12.77) набувало б мінімуму:
набувало б мінімуму: (12.78)
(12.78)



