
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Операции над матрицами: умножение на число, сложение и умножение матриц. Транспонирование матриц.Содержание книги
Поиск на нашем сайте Операции над матрицами: умножение на число, сложение и умножение матриц. Транспонирование матриц. Сложение и вычитание матриц сводится к соответствующим операциям над их элементами. Самым главным свойством этих операций является то, что они определены только для матриц одинакового размера. Таким образом, возможно определить операции сложения и вычитания матриц:
Определение. Суммой (разностью) матриц является матрица, элементами которой являются соответственно сумма (разность) элементов исходных матриц.
cij = aij ± bij С = А + В = В + А.
Операция умножения (деления) матрицы любого размера на произвольное число сводится к умножению (делению) каждого элемента матрицы на это число.
a (А+В) =aА ± aВ
А(a±b) = aА ± bА
Пример. Даны матрицы А =; B =, найти 2А + В.
2А =, 2А + В =.
Операция умножения матриц
Определение: Произведением матриц называется матрица, элементы которой могут быть вычислены по следующим формулам:
A×B = C;
Из приведенного определения видно, что операция умножения матриц определена только для матриц, число столбцов первой из которых равно числу строк второй. 1)Умножение матриц не коммутативно, т.е. АВ ¹ ВА даже если определены оба произведения. Однако, если для каких – либо матриц соотношение АВ=ВА выполняется, то такие матрицы называются перестановочными.
Самым характерным примером может служить единичная матрица, которая является перестановочной с любой другой матрицей того же размера.
Перестановочными могут быть только квадратные матрицы одного и того же порядка. А×Е = Е×А = А
Очевидно, что для любых матриц выполняются следующее свойство:
A×O = O; O×A = O,
где О – нулевая матрица.
2) Операция перемножения матриц ассоциативна, т.е. если определены произведения АВ и (АВ)С, то определены ВС и А(ВС), и выполняется равенство:
(АВ)С=А(ВС).
3) Операция умножения матриц дистрибутивна по отношению к сложению, т.е. если имеют смысл выражения А(В+С) и (А+В)С, то соответственно: А(В + С) = АВ + АС (А + В)С = АС + ВС.
4) Если произведение АВ определено, то для любого числа a верно соотношение:
a(AB) = (aA)B = A(aB).
5) Если определено произведение АВ, то определено произведение ВТАТ и выполняется равенство:
(АВ)Т = ВТАТ, где
индексом Т обозначается транспонированная матрица.
1. Заметим также, что для любых квадратных матриц det (AB) = detA×detB.
Определители квадратных матриц. Миноры и алгебраические дополнения элементов квадратных матриц. Вычисление определителей. Свойства определителей. Определители 2-го и 3-го порядков.
Будем рассматривать квадратные матрицы
Определители являются основными числовыми характеристиками квадратных матриц. Определителем (детерминантом) матрицы,
состоящей из одного числа, называется само это число. Определителем матрицы А= второго порядка называется число, равное разности произведений элементов главной и побочной диагоналей:
Рассмотрим матрицу третьего порядка: Решение
Алгебраические дополнения
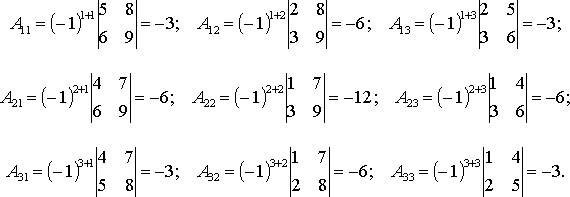
Алгебраическим дополнением Аij элемента аij матрицы n-го порядка называется его минор, взятый со знаком, зависящий от номера строки и номера столбца:
то есть алгебраическое дополнение совпадает с минором, когда сумма номеров строки и столбца – четное число, и отличается от минора знаком, когда сумма номеров строки и столба – нечетное число.
Пример 1. Найти алгебраические дополнения всех элементов матрицы
Решение
Обратная матрица. Обра́тная ма́трица — такая матрица A-1, при умножении на которую исходная матрица A даёт в результате единичную матрицу E:
Квадратная матрица обратима тогда и только тогда, когда она невырожденная, то есть её определитель не равен нулю. Для неквадратных матриц и вырожденных матриц обратных матриц не существует. Однако возможно обобщить это понятие и ввести псевдообратные матрицы, похожие на обратные по многим свойствам. Свойства обратной матрицы. , где det обозначает определитель. (AB) − 1 = B − 1A − 1 для любых двух обратимых матриц A и B. (AT) − 1 = (A − 1)T где * T обозначает транспонированную матрицу. (kA) − 1 = k − 1A − 1 для любого коэффициента. Если необходимо решить систему линейных уравнений Ax = b, (b — ненулевой вектор) где x — искомый вектор, и если A - 1 существует, то x = A − 1b. В противном случае либо размерность пространства решений больше нуля, либо их нет вовсе.
Системы линейных уравнений. Основные понятия. Многие теоретические и практические вопросы приводят не к одному уравнению, а к целой системе уравнений с несколькими неизвестными. Особенно важен случай системы линейных уравнений, т.е. системы m уравнений 1ой степени с n неизвестными:
a11x1 + … + a1n xn = b1;
a21x1 + … + a2n x n = b2;
………………………………
am1x1+ … + amnxn = bm.
Здесь x1, …, xn - неизвестные, а коэффициенты записаны так, что индексы при них указывают на номер уравнения и номер неизвестного. Значение систем 1-й степени определяется не только тем, что они простейшие. На практике часто имеют дело с заведомо малыми величинами, старшими степенями которых можно пренебречь, так что уравнения с такими величинами сводятся в первом приближении к линейным. Не менее важно, что решение систем линейных уравнений составляет существенную часть при численном решении разнообразных прикладных задач.
Способы решения систем линейных уравнений - очень интересная и важная тема. Системы уравнений и методы их решения рассматриваются в школьном курсе математики, но недостаточно широко. А для того, чтобы перейти к исследованию данной темы, также нужно было познакомиться с темой матриц и определителей. Этот же материал вообще в школьной программе не изучается. В процессе знакомства с данной работой приобретаются навыки, с помощью которых в последующем решение систем линейных уравнений станет намного проще, понятнее и быстрее.
6. Решение системы из п уравнений с п неизвестными по формуле Крамера и методом обратной матрицы. a11x1 + a12x2 + …+ a1n xn = b1;
a21x1 + a22x2 + …+ a2n xn = b2; (2)
……………………………………
an1x1 + an2x2 + …+ annxn = bn;
Определителем системы (2) называется определитель, составленный из коэффициентов аij.
a11 a12 … a1n
? = a21 a22 … a2n
…………………………
an1 an2 … ann Рассмотрим случай, когда?? 0. Докажем, что в этом случае система (2) является определенной, т.е. имеет одно единственное решение. Как и ранее, через Аij будем обозначать алгебраическое дополнение элемента аij в определителе?.
Умножим каждое уравнение системы (2) на алгебраические дополнения элементов i-го столбца определителя?, т.е. первое уравнение умножим на А1i, второе - на А2i и т.д., наконец, последнее уравнение - на Аni, а затем все полученные уравнения системы сложим. В результате будем иметь
(a11x1 + a12x2 + …+ a1ixi + …+ a1nxn) A1i + (a21x1 + a22x2 + …+ a2ixi + + …+ a2nxn) A2i + …+ (an1x1 + an2x2 + …+ anixi + …+ anxnn) Ani = b1A1i + b2A2i + …+ bnAni
или, сгруппировав члены относительно известных x1, x2, …, xn, получим
(a11A1i + a21A2i + …+ an1Ani) x1 + … +
+ (a1iA1i + a2iA2i + …+ aniAni) xi + … +
+ (a1nA1i + a2nA2i + …+ annAni) xn =
= b1A1i + b2A2i + …+ bnAni. (3)
Коэффициент при неизвестной хi равен определителю?, а коэффициенты при всех других неизвестных равны нулю. Свободный член уравнения (3) отличается от коэффициента при х1 тем, что коэффициенты а1i, а2i, …, аni заменены свободными членами b1, b2, …, bn уравнения (2). Следовательно, выражение b1A1i + b2A2i + …+ bnAni есть определитель i-го порядка, отличающийся от определителя только i-м столбцом, который заменен столбцом свободных членов. Обозначив этот определитель?xi, будем иметь a11 a12 … b1 … a1n ?xi = a21 a22 … b2 … a2n. (3) ……………………………… an1 an2 … bn … ann Таким образом, уравнение (3) можно записать в виде ?х =?xi, откуда при?? 0 х = ---- Придавая индексу i значения 1, 2, …, n, получаем: х1 = ----; х2 = ----; (4) ……………… хn = ----. Рассмотренный метод решения системы уравнений называется правилом Крамера, а формулы (4) - формулами Крамера.
Метод Гаусса. Практическое значение правила Крамера для решения системы n линейных уравнений с п неизвестными невелико, так как при его применении приходится вычислять п +1 определителей n-го порядка:, x1, x2, …,xn. Более удобным является так называемый метод Гаусса. Он применим и в более общем случае системы линейных уравнений, т. е. когда число уравнений не совпадает с числом неизвестных. Итак, пусть дана система, содержащая m линейных уравнений с п неизвестными: а11х1 + а12х2 + …+ а1nхn = b1; а21х1 + а22х2 + …+ а2nхn = b2; (6) . …………………………………… аm1х1 + аm2х2 + …+ аmnхn = bm Требуется найти все решения системы уравнений (6). Будем производить над системой элементарные преобразования: исключение из системы уравнения вида
0х1 + 0х2 + …+ 0хn = 0 (7)
и прибавление к обеим частям одного из уравнений системы соответствующих частей другого уравнения, умноженных на любое число.
Очевидно, что если мы проделаем над уравнениями системы (6) любое из приведенных выше преобразований, то получим систему, равносильную исходной. При необходимости систему (6) будем подвергать еще одному виду преобразований - перенумерации переменных и уравнений. Идея этого преобразования заключается в следующем. Если, например, возникает необходимость, чтобы в каком-то уравнении системы (например, в k -м) неизвестная x1 стояла на первом месте, то в результате перенумерации соответствующее уравнение запишется в виде
akix1 +... + ak2x2 + … + ak1xi+... + aknxn = bk,
т. е. вместо прежней неизвестной хi мы будем писать х1, а вместо x1 - хi Метод Гаусса решения системы (6) заключается в последовательном исключении переменных.
Если среди уравнений системы есть хотя бы одно уравнение вида
0xl + 0x2+... + 0xn= b, (8)
причем b 0, то совершенно очевидно, что ни одна система значений х1, х2..., хп не удовлетворяет этому уравнению, а следовательно, и системе в целом, поэтому система несовместна.
Пусть теперь система (6) не содержит уравнений вида (7) или (8). Это значит, что в каждом уравнении системы хотя бы один из коэффициентов отличен от нуля. Пусть a110 (в противном случае, применив элементарные преобразования, мы сможем добиться, чтобы первый коэффициент первого уравнения был отличен от нуля). Оставив первое уравнение без изменения, исключим из всех уравнений системы (6), начиная со второго, неизвестную х1. Для этого из второго уравнения вычтем первое, умноженное на a21/a11, затем из третьего уравнения вычтем также первое, но уже умноженное на a31/a11, и так до последнего уравнения. В результате этих преобразований мы получим равносильную систему
а11х1 + а12х2 + … + а1nхn = b1;
а?22х2 + …+ а?2nхn = b?2;
………………………… (9)
а?m2х2 + …+ а?mnхn = b?m
Заметим, что в системе (9) число уравнений может быть и меньше m, так как среди них могут оказаться уравнения вида (7), которые, как мы условились ранее, можно отбросить.
Пусть а22 0. Применим те же самые рассуждения и исключим из последних п - 2 уравнений системы (9) неизвестную х2 путем вычитания из третьего уравнения второго, умноженного на a?32/a?22, из четвертого уравнения -- второго, умноженного на a?34/a?22 и т. д. В результате получим систему
а11х1 + а12х2 + а13х3 + …+ а1nхn = b1;
а?22х2 + а?23х3 + …+ а?2nхn = b?2; а?22х2 + а?23х3 + …+ а?2nхn = b?2;
а??33х3 + …+ а?3хn = b?3;
……………………………
а?m3х3 +…+а?mnхn = b?m
.
Продолжая этот процесс, систему (6) приведем к равносильной системе вида
c11х1 + c12х2 + c13х3 + …+ c1kхk + …+ c1nхn = d1;
c22х2 + c23х3 + …+ c2kхk + …+ c2nхn = d2;
c33х3 + …+ c3kхk + …+ c3nхn = d3; (10)
………………………………………
ckkхk + …+cknхn = dk.
в которой коэффициенты c11, c22,..., ckk отличны от нуля.
Может оказаться, что в процессе преобразования на каком-то шаге в полученной системе окажется уравнение вида (8). В этом случае система (7) не имеет решений. Предположим теперь, что среди уравнений полученной системы нет уравнения вида (8). Тогда для решения системы (6) необходимо решить систему (9), что не составляет особого труда. Рассмотрим два возможных случая.
1. k = n (это частный случай, когда число уравнений совпадает с числом неизвестных). Тогда последнее уравнение системы (10) имеет вид сппхп = dn, откуда хп = dn /cnn. Подставив это значение в предпоследнее уравнение системы (7), имеющее вид
cn-1n-1xn-1 + cn-1nxn= dn-1, найдем значение неизвестной xn-1 и т. д.; наконец, из первого уравнения найдем неизвестную x1 Таким образом, в случае k = п система уравнений (6) имеет единственное решение.
2. k < n. Тогда из последнего уравнения системы (10), найдем неизвестную xk, выраженную через неизвестные хk+1, хk+2,... xn:
xk = (dkk - ck k+1xk+1 - … - cknxn) Подставив это значение неизвестной в предпоследнее уравнение системы (10), найдем выражение для неизвестной хk-1,и т. д.; наконец, подставив значения неизвестных хk, хk-1,... x2 в первое уравнение системы (10), получим выражение для неизвестной x1. В результате указанная система уравнений (6) приводится к виду
x1 = d?1 + c?1 k+1xk+1 + …+ c?1nxn;
x2 = d?2 + c?2 k+1xk+1 + …+ c?2nxn; (11)
………………………………………
xk = d?k + c?k k+1 xk+1 + …+ cknxn.
Неизвестные хk+1, хk+2, …, хп называются свободными. Им можно придать различные значения и затем из системы (6) найти значения неизвестных х1, х2, …, хk. Таким образом, в случае k < п совместная система уравнений (6) имеет бесчисленное множество решений.
Заметим, что если в процессе приведения системы (6) к системе (11) была произведена перенумерация неизвестных, то в системе (11) необходимо вернуться к их первоначальной нумерации.
На практике процесс решения системы уравнений облегчается тем, что указанным выше преобразованиям подвергают не саму систему, а матрицу, составленную из коэффициентов уравнений системы (6) и их свободных членов. При этом каждому элементарному преобразованию, проведенному над системой (6), соответствует преобразование над матрицей (12): вычеркивание строки, все элементы которой состоят из нулей, прибавление к элементам некоторой строки соответствующих элементов другой строки, умноженных на некоторое число, и перестановка двух столбцов матрицы (12).
Пример 1. Решить методом Гаусса систему уравнений x1 - 2x2 + x3 + x4 = -1;
3x1 + 2x2 - 3x3 - 4x4 = 2;
2x1 - x2 + 2x3 - 3x4 = 9;
x1 + 3x2 - 3x3 - x4 = -1
Рис.2 Линии первого порядка. Прямая линия — алгебраическая линия первого порядка: в декартовой системе координат прямая линия задается на плоскости уравнением первой степени (линейное уравнение).
Расстояние от точки до прямой.
Теорема. Если задана точка М(х0, у0), то расстояние до прямой Ах + Ву + С =0 определяется как
Доказательство. Пусть точка М1(х1, у1) – основание перпендикуляра, опущенного из точки М на заданную прямую. Тогда расстояние между точками М и М1:
(1)
Координаты x1 и у1 могут быть найдены как решение системы уравнений:
Второе уравнение системы – это уравнение прямой, проходящей через заданную точку М0 перпендикулярно заданной прямой.
Если преобразовать первое уравнение системы к виду:
A(x – x0) + B(y – y0) + Ax0 + By0 + C = 0,
то, решая, получим: Подставляя эти выражения в уравнение (1), находим:
Пример. Определить угол между прямыми: y = -3x + 7; y = 2x + 1.
k1 = -3; k2 = 2 tgj =; j = p/4.
Пример. Показать, что прямые 3х – 5у + 7 = 0 и 10х + 6у – 3 = 0 перпендикулярны.
Находим: k1 = 3/5, k2 = -5/3, k1k2 = -1, следовательно, прямые перпендикулярны.
Пример. Даны вершины треугольника А(0; 1), B(6; 5), C(12; -1). Найти уравнение высоты, проведенной из вершины С.
Находим уравнение стороны АВ:; 4x = 6y – 6;
2x – 3y + 3 = 0;
Искомое уравнение высоты имеет вид: Ax + By + C = 0 или y = kx + b.
k =. Тогда y =. Т.к. высота проходит через точку С, то ее координаты удовлетворяют данному уравнению: откуда b = 17. Итого:.
Ответ: 3x + 2y – 34 = 0. Теорема доказана.
Линии на плоскости и их уравнения. Прямая на плоскости. Различные формы уравнений прямой на плоскости. Угол между прямыми. Расстояние от точки до прямой. Пусть на плоскости задана декартова система координат и некоторая линия L.
Определение 7.1. Уравнение Ф(х,у) = 0 (7.1)
называется уравнением линии L, если этому уравнению удовлетворяют координаты х и у любой точки, лежащей на линии L, и не удовлетворяют координаты ни одной точки, не лежащей на линии L.
Пример.
(х – а)² + (y – b)² = R² - уравнение окружности радиуса R с центром в точке (a,b).
где функции непрерывны по параметру t.
Прямая на плоскости
Рассмотрим различные виды уравнений прямой на плоскости.
Пусть прямая проходит через точку М0 (x0,y0) перпендикулярно вектору n = {A,B}. Тогда вектор, где М(х,у) – произвольная точка прямой, ортогонален n. Поэтому координаты любой точки данной прямой удовлетворяют уравнению
А(х – х0) + В(у – у0) = 0 - (7.3)
уравнение прямой, проходящей через данную точку перпендикулярно данному вектору. Замечание. Вектор n называется нормалью к прямой.
Преобразуем уравнение (7.3) к виду:
Ах + Ву + (-Ах0 – Ву0) = 0.
Обозначив -Ах0 – Ву0 = С, получим общее уравнение прямой:
Ах + Ву + С = 0. (7.4)
Получим теперь уравнение прямой, проходящей через точку М0 (x0,y0) параллельно вектору q = {l,m}. Так
где М(х,у) – произвольная точка прямой, коллинеарен q, координаты любой точки данной прямой удовлетворяют уравнению
называемому каноническим уравнением прямой. Вектор q при этом называется направляющим вектором прямой. В частности, если прямая проходит через точки М1(х1,у1) и М2(х2,у2), ее направляющим вектором можно считать
следует:
уравнение прямой, проходящей через две заданные точки. Замечательные пределы. Замеча́тельные преде́лы — термин, использующийся в советских и российских учебниках по математическому анализу для обозначения некоторых широко известных математических тождеств со взятием предела. Особенно известны: Первый замечательный предел:
Второй замечательный предел:
Первый замечательный предел
Доказательство Пусть
Отложим этот угол на единичной окружности (R = 1).
Точка K — точка пересечения луча с окружностью, а точка L — с касательной к единичной окружности в точке (1;0). Точка H — проекция точки K на ось OX.
Очевидно, что:
(где SsectOKA — площадь сектора OKA)
(из
: | LA | = tgx) Подставляя в (1), получим:
Так как при
Умножаем на sinx:
Перейдём к пределу:
Найдём левый односторонний предел:
Правый и левый односторонний пределы существуют и равны 1, а значит и сам предел равен 1.
Следствия:
Понятие непрерывности функций. Непрерывность элементарных функций. Основные свойства непрерывных функций: существование наименьших и наибольших значений, существование промежуточных значений. Примеры разрывных функций. Непрерывная функция — функция без «скачков», то есть такая у которой малые изменения аргумента приводят к малым изменениям значения отображения.
Непрерывная функция вообще говоря, — синоним понятия непрерывное отображение, тем не менее, чаще всего этот термин используется в более узком смысле — для отображений между числовыми пространствами, например, на вещественной прямой. Эта статья посвящена именно непрерывным функциям, определённым на подмножестве вещественных чисел и принимающих вещественные значения.
Определение непрерывности по Гейне Говорят, что функция действительного переменного f (x) является непрерывной в точке
(
множество действительных чисел), если для любой последовательности
такой, что
выполняется соотношение
На практике удобно использовать следующие 3 условия непрерывности функции f (x) в точке x = a:
Функция f (x) определена в точке x = a; 2. Предел
3. Выполняется равенство
Определение непрерывности по Коши (нотация
Рассмотрим функцию f (x), которая отображает множество действительных чисел
на другое подмножество B действительных чисел. Говорят, что функция f (x) является непрерывной в точке
если для любого числа
существует число
такое, что для всех
удовлетворяющих соотношению
выполняется неравенство
Определение непрерывности в терминах приращений аргумента и функции Определение непрерывности можно также сформулировать, используя приращения аргумента и функции. Функция является непрерывной в точке x = a, если справедливо равенство
где
Приведенные определения непрерывности функции эквивалентны на множестве действительных чисел.
Функция является непрерывной на данном интервале, если она непрерывна в каждой точке этого интервала.
Асимптоты графика функции. Асимптоты графика функции Назовём асимптотами прямые линии, к которым неограниченно приближается график функции, когда точка графика неограниченно удаляется от начала координат. В зависимости от поведения аргумента при этом, различаются два вида асимптот: вертикальные и наклонные. Определение 7. 1 Вертикальной асимптотой графика функции
называется вертикальная прямая
, если
или
при каком -либо из условий
Заметим, что мы при этом не требуем, чтобы точка принадлежала области определения функции
однако она должна быть определена по крайней мере в какой-либо из односторонних окрестностей этой точки:
или
где
Правило Лопиталя. Правило Бернулли-Лопита́ля — метод нахождения пределов функций, раскрывающий неопределённости вида. И
Обосновывающая метод теорема утверждает, что при некоторых условиях предел отношения функций равен пределу отношения их производных. Точная формулировка: Условия:
Или
f(x) и g(x) дифференцируемы в проколотой окрестности a;
в проколотой окрестности a; существует
тогда существует
Пределы также могут быть односторонними. Операции над матрицами: умножение на число, сложение и умножение матриц. Транспонирование матриц. Сложение и вычитание матриц сводится к соответствующим операциям над их элементами. Самым главным свойством этих операций является то, что они определены только для матриц одинакового размера. Таким образом, возможно определить операции сложения и вычитания матриц:
Определение. Суммой (разностью) матриц является матрица, элементами которой являются соответственно сумма (разность) элементов исходных матриц.
cij = aij ± bij С = А + В = В + А.
Операция умножения (деления) матрицы любого размера на произвольное число сводится к умножению (делению) каждого элемента матрицы на это число.
a (А+В) =aА ± aВ
А(a±b) = aА ± bА
Пример. Даны матрицы А =; B =, найти 2А + В.
2А =, 2А + В =.
Операция умножения матриц
Определение: Произведением матриц называется матрица, элементы которой могут быть вычислены по следующим формулам:
A×B = C;
Из приведенного определения видно, что операция умножения матриц определена только для матриц, число столбцов первой из которых равно числу строк второй. 1)Умножение матриц не коммутативно, т.е. АВ ¹ ВА даже если определены оба произведения. Однако, если для каких – либо матриц соотношение АВ=ВА выполняется, то такие матрицы называются перестановочными.
Самым характерным примером может служить единичная матрица, которая является перестановочной с любой другой матрицей того же размера.
Перестановочными могут быть только квадратные матрицы одного и того же порядка. А×Е = Е×А = А
Очевидно, что для любых матриц выполняются следующее свойство:
A×O = O; O×A = O,
где О – нулевая матрица.
2) Операция перемножения матриц ассоциативна, т.е. если определены произведения АВ и (АВ)С, то определены ВС и А(ВС), и выполняется равенство:
(АВ)С=А(ВС).
3) Операция умножения матриц дистрибутивна по отношению к сложению, т.е. если имеют смысл выражения А(В+С) и (А+В)С, то соответственно: А(В + С) = АВ + АС (А + В)С = АС + ВС.
4) Если произведение АВ определено, то для любого числа a верно соотношение:
a(AB) = (aA)B = A(aB).
5) Если определено произведение АВ, то определено произведение ВТАТ и выполняется равенство:
(АВ)Т = ВТАТ, где
индексом Т обозначается транспонированная матрица.
1. Заметим также, что для любых квадратных матриц det (AB) = detA×detB.
|
||
|
|
Последнее изменение этой страницы: 2016-12-15; просмотров: 476; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.41 (0.015 с.) |


 как вектор
как вектор



























 существует;
существует;




























