Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Особенности устройства и работы элементов ФСУРСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Фазовый детектор В данном случае фазовый детектор используется для переноса спектра информационного сигнала ошибки наведения с частоты сканирования /2 на частоту управления полётом /3 с сохранением амплитудных и фазовых соотношений. Для преобразования используется опорное напряжение с катушек ГОН, имеющее частоту /2 + /3. Операция переноса спектра реализуется перемножением информационного и опорного сигналов. В качестве умножителя используются два операционных усилителя с инвертирующим включением. В цепи отрицательной обратной связи ОУ включены нелинейные элементы — диоды. И поэтому в них протекают токи комбинационных частот (т (/2 + /3) ± л/2). Далее, используя фазовые соотношения и логику последовательного алгебраического суммирования, взаимно подавляют сигналы исходных частот (сканирования и ГОН), а из оставшихся сигналов суммарной и разностной частот с помощью двойного Т-образного фильтра выделяют сигнал разностной частоты [(/2 + /3) — /2 = /3]. Физический смысл такого преобразования состоит в том, что ошибка наведения проецируется на вращающуюся плоскость, в которой рули создают управляющую силу. При этом получаемый синусоидальный сигнал частоты /3 будет нести в себе информацию о том, в какую сторону (фаза сигнала) и насколько (амплитуда сигнала) нужно повернуть рули в любой момент периода их вращения, чтобы создаваемая ими управляющая сила непрерывно уменьшала ошибку наведения. Информационный сигнал на частоте управления с выхода фазового детектора поступает на первый вход сумматора (XII) схемы линеаризации. Схема линеаризации Схема состоит из генератора линеаризации и сумматора-усилителя. Генератор линеаризации собран по схеме КС-генератора низкой частоты с использованием операционного усилителя, частоты зависимой КС-цепи положительной обратной связи и фильтра низких частот. Генератор вырабатывает синусоидальное напряжение удвоенной частоты управления (2/3), поступающее на второй вход сумматора. При этом суммарный сигнал (Цсум = Ц,д + Ц/га) на выходе сумматора XII определяется в зависимости от соотношения амплитуд Ц/фд и ЦТл. Усилитель-ограничитель Усилитель состоит из каскада усиления на интегральной схеме дифференциального усилителя и каскада ограничения на составном транзисторе.
Входными сигналами усилителя являются суммарный информационный сигнал с XII и сигнал датчика угловых скоростей контура демпфирования колебаний корпуса ракеты. Выходной управляющий импульсный сигнал подается на усилитель мощности, работающий в ключевом режиме. Вид выходного сигнала в зависимости от Ц/сум представлен на рис. 38. Очевидно, что под действием управляющего сигнала рулевая машина будет перебрасывать рули из однократного положения в другое по-разному: • При Ц/фд = 0 рули перебрасываются четырежды за один оборот корпуса и будут находиться в каждом положении одинаковое время, поэтому результирующая управляющей силы, создаваемая ими, будет равна нулю. • При Ц/фд/Црл > 1,5 рули перебрасываются дважды на одинаковое время. Вспомнив, что с плоскостью ошибки наведения связана фаза Ц/фд, а значит и временное положение импульсов Ц,д в периоде управления (Тупр), понимаем, что рули создадут максимальную результирующую управляющую силу, лежащую в плоскости ошибки наведения и уменьшающую эту ошибку. • При 0 < Цвд/Цл < 1,5 рули перебрасываются четырежды на разное время и создадут результирующую управляющую силу (К) в плоскости ошибки, по величине пропорциональную коэффициенту команды КК = Д/Ктах. Таким образом, с помощью схемы линеаризации введена линейная зависимость управляющей силы от величины ошибки наведения. ФУНКЦИОНИРОВАНИЕ АВТОПИЛОТА 1. Сигнал ошибки наведения ракеты, пропорциональный угловой скорости линии визирования, с выхода усилителя коррекции следящего координатора цели поступает на синхронный фильтр формирователя сигнала управления рулями (ФСУР). Информация о величине и плоскости ошибки наведения содержится в амплитуде и фазе периодического сигнала с частотой сканирования цели. 2. Синхронный фильтр позволяет выделить первую гармонику входного сигнала и обеспечивает высокую точность передачи информации. 3. С помощью усилителя-динамического ограничителя задаётся и стабилизируется требуемый коэффициент передачи входного сигнала на суммирующий усилитель XI. На второй вход сумматора поступает сигнал со схемы ФСУРа по пеленгу. 4. Схема ФСУРа по пеленгу, используя сигналы статорной катушки пеленга, блока пусковой логики и кнопки «НАВСТРЕЧУ-ВДОГОН», формирует на начальном этапе полёта ракеты дополнительный синусоидальный сигнал, при суммировании которого с сигналом ошибки наведения обеспечивается ускоренный вывод ракеты на кинематическую траекторию.
5. Для реализации одноканального управления фазовый детектор, используя сигнал ошибки наведения с выхода сумматора XI, следующий на частоте сканирования/2, и сигнал генератора опорных напряжений с частотой вращения ротора /2 + /3, переносит информацию об ошибке наведения с частоты сканирования на частоту управления рулями /3. Синусоидальный сигнал частоты /3 несёт в себе информацию о том, в какую сторону (фаза) и насколько (амплитуда) нужно отклонить рули в любой момент периода их вращения, чтобы создаваемая ими управляющая сила непрерывно уменьшала ошибку наведения. Сигнал с выхода фазового детектора поступает на суммирующий усилитель XII схемы линеаризации. 6. Схема линеаризации применяется для сохранения линейной зависимости величины управляющей силы, создаваемой рулями, от величины сигнала ошибки наведения при использовании релейного режима работы рулей. Благодаря ей формируется суммарный управляющий сигнал, обеспечивающий переброс рулей на ±15° четыре раза за период вращения и нахождение рулей разное время в каждом из положений. Нужно помнить, что фаза суммарного управляющего сигнала ошибки наведения будет задавать плоскость результирующей управляющей силы, совпадающей с плоскостью ошибки наведения. 7. С помощью усилителя-ограничителя и усилителя мощности, работающего в ключевом режиме, суммарный управляющий сигнал с выхода XII преобразуется в импульсное двухполярное напряжение управления электромагнитами рулевой машины. 8. Для гашения поперечных колебаний корпуса ракеты, возникающих при управлении, используется контур отрицательной динамической обратной связи (электронный амортизатор), повышающий устойчивость управления. Для этого сигнал датчика угловой скорости колебаний с определённым коэффициентом передачи вычитается на входе усилителя-ограничителя из суммарного управляющего сигнала. 9. Под действием управляющего напряжения поочередно срабатывают электромагниты золотника, обеспечивая подачу газов порохового аккумулятора, давление (ПАД) в полости рабочего цилиндра рулевой машины и соответствующее перемещение поводка и рулей. 10. Рули создают аэродинамическую управляющую силу, результирующая К которой за период управления: а) лежит в плоскости ошибки наведения ракеты; б) направлена на уменьшение ошибки наведения; в) пропорциональна величине ошибки наведения. Под действием результирующей управляющей силы ракета удерживается на кинематической траектории полёта в упрежденную точку встречи с целью. 11. На участке разгона ракеты эффективность аэродинамического управления недостаточна, поэтому дополнительно используется пороховой управляющий двигатель. Для повышения эффективности поражения цели во ФСУРе предусмотрена схема смещения, обеспечивающая на конечном участке полёта смещение траектории от сопла в корпус самолёта.
Пороховой аккумулятор давления
Пороховой аккумулятор давления (ПАД) предназначен для питания пороховыми газами турбогенератора, а также рулевой машины. Он представляет собой камеру с зарядом твёрдого топлива и элементами воспламенения. Образование пороховых газов происходит за счёт торцевого горения заряда, поэтому длина ПАД определяется временем управляемого полёта ракеты. Технические характеристики: • скорость горения заряда — примерно 5 мм/с; • время горения — не менее 11с; • расход газа — 2,5 г/с. ПАД состоит из стального корпуса, являющегося камерой сгорания. Внутри корпуса размещается пороховой заряд, покрытый бронировкой — защитным слоем, препятствующим горению с боковых сторон. В корпус ввёрнут воспламенитель, состоящий из электровоспламенителя, навески пороха и пиротехнической петарды. При срабатывании электровоспламенителя срабатывает пиротехническая петарда, затем воспламеняется навеска пороха. Раскалённые частицы пороха поджигают основной заряд, и происходит его торцевое горение со скоростью примерно 5 мм/с в течение не менее 11 с. С выхода ПАД газ через дроссель и газовую втулку поступает в турбогенератор и РМ. ПАД, как и ПУД, являясь пиротехническим устройством, несет определенную опасность. Поэтому при сборке рулевого отсека пиротехнические устройства не снаряжаются. Заряды и электровоспламенители поступают отдельно на снаряжательную базу и устанавливаются при общем снаряжении ракеты. Контроль качества ПАД и ПУД производится на отдельных сборках, взятых из партии, без установки в рулевой отсек путём поджига их с замером внутрибаллистических характеристик темперирования на предельных температурах.
Бортовой источник питания Бортовой источник питания (БИП) предназначен для обеспечения энергией аппаратуры ракеты. Он представляет собой маленькую электростанцию, источником энергии для которой, как и для рулевой машины, являются газы, образующиеся при работе ПАД.
К элементам БИП относятся: 1) турбогенератор; 2) стабилизатор-выпрямитель. 1. Турбогенератор, имеющий большую удельную мощность, предназначен для выработки напряжения переменного тока. Он представляет собой однофазный генератор с возбуждением от постоянного магнита и приводом от одноступенчатой активной турбины на его валу. 2. Стабилизатор-выпрямитель представляет собой электрический прибор и предназначен для преобразования напряжения переменного тока, поступающего с турбогенератора, в напряжение постоянного тока и его стабилизации.
Технические характеристики БИП: • мощность — 250 Вт; • частота оборотов турбины — 9000—18000 об/мин; • выдаваемое напряжение постоянного тока — 40±2 В и 20±2 В. 1. Турбогенератор состоит из статора и ротора, на оси которого крепится турбина, являющаяся его приводом. Статор представляет собой литой корпус, в котором установлены два постоянных магнита 10МДК-25ВА и две секции с обмотками. Статор залит компаундом К-153, который обеспечивает жесткое крепление всех входящих в него деталей, а также механическую защиту и электрическую прочность обмоток. Ротор представляет собой вал с установленными на нём штампованными звездочками специальной формы из электротехнической стали 49КФ, приклеенными клеем БФ-4. На валу насажены два радиальных шарикоподшипника. Один из них служит опорой ротора. Он предварительно завальцовывается во втулку из нержавеющей стали, которая с помощью фланца крепится к статору винтами. Второй шарикоподшипник может перемещаться в осевом направлении и является плавающей опорой. При сборке после установки ротора в статор он закрывается крышкой и на нём крепится турбина. Особенностью устройства турбогенератора является совмещение в одной конструкции генератора и турбопривода. Турбопривод, кроме турбины, включает ещё цилиндрическое расширяющееся сопло с критическим сечением 1,5 мм и диаметром на выходе 2,1 мм, расположенное под углом 17° к корпусу статора. Для выхода газа в корпусе рулевого отсека имеется прямоугольный паз, через который газ сбрасывается в атмосферу. Диаметр турбины определяется максимальным габаритом магнитной системы турбогенератора. Диаметр отверстий турбины, создающих рабочие поверхности лопаток, и их число выбраны из условия прочности перемычек. Они и сталь, в свою очередь, определяют диаметр выходного сечения сопла с учетом необходимого перекрытия.
Работа турбогенератора основана на эффекте индуцирования переменной ЭДС в обмотках статора при изменении внутри них величины магнитного потока. Пере Пороховые газы ПАД через сопло попадают на лопатки турбины и приводят её во вращение вместе с ротором. При повороте ротора на половину полюсного деления величина магнитного потока, проходя через обмотку генератора, уменьшается, а при повороте ротора на одно полюсное деление — увеличивается, что соответствует одному периоду переменного тока. Индуцированная в обмотке статора переменная ЭДС снимается с клемм и подается на вход стабилизатора-выпрямителя. Частота переменного тока зависит от количества зубьев в звездочке и скорости вращения турбины. Число зубьев в звездочке ограничено конструкцией турбогенератора. Максимальная частота его вращения зависит от параметров газового потока, силы трения и физических возможностей вращающихся деталей, в первую очередь подшипников.
Можно определить частоту переменного тока по формуле: / = 2рп/60, где Хр — число зубьев (10); п — число оборотов в минуту (9000—18000). 2. Стабилизатор-выпрямитель выполняет две функции: 1) преобразует напряжение переменного тока турбогенератора в требуемые значения постоянных напряжений и поддерживает их стабильность при изменениях скорости вращения ротора турбогенератора и тока нагрузки; 2) регулирует скорость вращения ротора турбогенератора при изменении давления газа на входе в сопло путём создания дополнительной электромагнитной нагрузки на вал турбины. Для этого структурная схема стабилизатора-выпрямителя состоит из взаимосвязанных цепей нагрузки, регулирования и управления, и фактически стабилизация напряжения происходит по обоим контурам одновременно. В первом случае способ стабилизации частоты магнитоэлектрического синхронного генератора основан на гашении избыточной мощности привода за счёт превращения её в потерю в магнитопроводе генератора, для чего в цепь нагрузки включён управляющий дроссель насыщения. Недогруженный генератор развивает обороты, превышающие необходимые для обеспечения требуемой нагрузки, а повышение оборотов ведёт к повышению напряжения на нагрузке. Это напряжение сравнивается с опорным в схеме сравнения, и выделяется разностный сигнал, который обеспечивает компенсацию увеличения напряжения на нагрузке и стабилизирует его на определенном уровне. По мере роста напряжения до 40 В пробивается стабилитрон. В цепи стабилизации протекает значительный ток, который вызывает увеличение электрических потерь в генераторе и торможение ротора. Во втором случае повышение оборотов вызывает увеличение магнитного потока в генераторе и возрастание потерь на подмагничивание и вихревые токи. Возрастание потерь с учётом повышенной частоты, близкой к резонансной, настолько значительно, что вызывает большой дополнительный момент, вызывающий торможение вала турбогенератора, и ограничивает скорость вращения ротора. Поскольку напряжение 20 В формируется с тех же витков трансформатора, то стабилизируется и оно. Стабилизированное напряжение 20 В поступает со стабилизатора- выпрямителя на ОГС, РО, ДУС, БЧ.
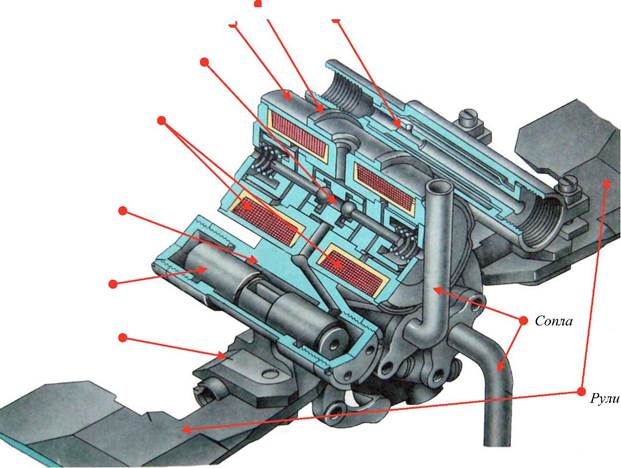
Рулевая машина Рулевая машина предназначена для аэродинамического управления ракетой в полёте. Одновременно РМ служит распределительным устройством в системе газодинамического управления ракетой на начальном участке траектории, когда аэродинамические рули неэффективны. Она является газовым усилителем управляющих электрических сигналов, формируемых ОГС. Рулевая машина (РМ) состоит из обоймы, в приливах которой расположены рабочий цилиндр с поршнем и фильтр тонкой очистки пороховых газов. В обойму запрессован корпус с золотниковым распределителем, состоящим из четырехкромочного золотника, двух втулок и якорей. В корпусе также размещены две катушки электромагнитов. Обойма имеет две проушины, в которых на подшипниках расположена стойка с пружинами (рессорой) и с напрессованным на нее поводком. В пазах поводка и стойки расположены рули, которые в полёте удерживаются в раскрытом положении стопорами и пружинами. В приливе обоймы, между проушинами, размещается газораспределительная втулка, жёстко закрепленная с помощью фиксатора на стойке. На втулке имеется паз с отсечными кромками для подвода газа, поступающего от ПУД к каналам и соплам. РМ работает от газов ПАД, которые по трубе через фильтр тонкой очистки поступают к золотнику и от него по каналам в кольцах, корпусе и обойме под поршень. Управляющие сигналы с ОГС поступают поочерёдно в катушки электромагнитов РМ. При прохождении тока через правую катушку электромагнита якорь с золотником притягивается в сторону этого электромагнита и открывает проход газа в левую полость рабочего цилиндра под поршень. Под давлением газа поршень перемещается в крайнее правое положение до упора в крышку. Перемещаясь, поршень увлекает за собой выступ поводка и поворачивает поводок и стойку, а вместе с ними и рули в крайнее положение. Обойма
Корпус. \ Ф^ътр
Одновременно поворачивается и газораспределительная втулка, при этом отсечённая кромка открывает доступ газа от ПУД через канал к соответствующему соплу. При прохождении тока через левую катушку электромагнита поршень перемещается в другое крайнее положение.
В момент переключения тока в катушках, когда усилие, создаваемое пороховыми газами, превышает силу притяжения электромагнита, золотник под действием силы от пороховых газов перемещается, причём перемещение золотника начинается раньше, чем происходит нарастание тока в другой катушке, что повышает быстродействие РМ. Пороховой управляющий двигатель ПУД предназначен для газодинамического управления ракетой на начальном участке траектории полёта. В рулевом отсеке находятся такие пиротехнические устройства, как пороховой аккумулятор давления (ПАД) и пороховой управляющий двигатель (ПУД). Особенности работы этих устройств определяют их одинаковые конструкции и компоновку. Каждый из них состоит из корпуса, выполненного из прочной стали, в который вложен пороховой заряд и установлен элемент воспламенения. Пороховой заряд представляет собой шашку из баллистического состава. Как известно, пороха бывают баллистическими и сме- севыми. Ярким представителем смесевого пороха является простой, так называемый дымный оружейный порох, изобретённый в древнем Китае и представляющий собой механическую смесь тонко измельченного минерального окислителя (селитры), органического горючего (угля) и полимерной связки (серы). В настоящее время такой порох применяется менее широко, так как его повсеместно заменяют баллистические пороха. Баллистический состав представляет собой вещество, в котором основные компоненты твердого топлива (окислитель и горючее) входят в структуру одной молекулы. Основой таких порохов является микроклетчатка. В зависимости от назначения пороха по-разному обрабатываются с добавлением различных добавок. В результате горение такого вещества происходит без образования крупных частиц и с высокими показателями удельного объема газа (объема, который занимает продукт сгорания вещества). Для воспламенения вещества используется воспламенитель, который включает в себя электровоспламенитель, пиротехническую петарду и навеску из смесевого (дымного) пороха. Электровоспламенитель представляет собой электротехническое изделие, в металлическом корпусе которого размещаются колодка с мостиком накаливания, на который нанесена капелька вещества, надёжно вспыхивающая от нагрева мостика (металлической проволоки), и небольшая навеска пиротехнического состава, которую поджигает вспыхивающее вещество колодки. Корпус электровоспламенителя после сборки заливается герметизирующим составом. Электровоспламенитель имеет посадочные места с резьбой и проводами с наконечниками. Энергии воспламенителя зачастую недостаточно для воспламенения основного заряда. Поэтому для надёжного воспламенения заряда применяют воспламенитель. Он состоит из пиротехнической петарды и навески дымного пороха. После срабатывания электровоспламенителя загорается пиротехническая петарда, поджигающая навеску пороха. При сгорании пороха образуются крупные раскалённые частицы, которые попадают на основной заряд и вызывают его возгорание. Горение основного заряда происходит по всей его открытой поверхности. В зависимости от требований к скорости газообразования и времени работы устройства форма заряда может быть выбрана такой, что она обеспечит максимальную поверхность горения. Это достигается образованием различных щелей, срезов и внутренних профилей. Если же требуется уменьшить поверхность горения, то её закрывают различными бронировками, обеспечивая, например, только торцевое горение заряда. ПУД состоит из корпуса, представляющего собой камеру сгорания, и переходника. Внутри корпуса размещаются пороховой заряд и воспламенитель, состоящий из электровоспламенителя, навески пороха и пиротехнической петарды. Расход газа и параметры внутренней баллистики определяются дроссельным отверстием в переходнике.
После вылета ракеты из пусковой трубы и раскрытия рулей электрический импульс с конденсатора взведения поступает на электровоспламенитель, воспламеняющий навеску пороха и петарду, от форса пламени которых загорается пороховой заряд. Пороховые газы, проходя через распределительную втулку и два сопла, расположенные перпендикулярно плоскости рулей РМ, создают управляющее усилие, обеспечивающее разворот ракеты. Датчик угловой скорости ДУС предназначен для формирования электрического сигнала, пропорционального угловой скорости колебаний ракеты относительно её поперечных осей. Этот сигнал используется в качестве отрицательной динамической обратной связи в контуре демпфирования поперечных колебаний, возникающих при управлении ракетой.
ДУС представляет собой рамку с двумя электромагнитными обмотками, которая на полуосях подвешена в центровых винтах с корундовыми подпятниками и может покачиваться в рабочих зазорах магнитной цепи, состоящий из основания, постоянного магнита и башмаков. Сигнал угловой скорости снимается с обмоток рамки и через без- моментные растяжки выводится на контакты, изолированные от корпуса.
вой скоростью со быстровращающаяся вместе с корпусом ракеты рамка приобретёт свойства гироскопа, и на неё начнёт действовать гироскопический момент Мг. Под действием гироскопического момента рамка ДУС начинает колебаться в магнитном поле постоянного магнита, ив её обмотках индуцируется синусоидальная ЭДС, амплитуда которой характеризует величину угловой скорости отклонения (с), а фаза — угол наклона плоскости отклонения Снимаемый с обмоток рамки сигнал через усилитель ДУС подается на усилитель-ограничитель ФСУР, повышающий устойчивость управления ракетой. Часть усиленного сигнала поступает на дополнительную демпфирующую обмотку рамки для компенсации её собственных колебаний. БОЕВОЕ СНАРЯЖЕНИЕ Боевое снаряжение ракеты (изделие 9Н312Ф) предназначено для поражения воздушной цели или нанесения ей повреждений, приводящих к невозможности выполнения боевой задачи. Основными поражающими факторами являются: фугасное действие ударной волны продуктов взрыва боевой части и остатков топлива двигательной установки, а также осколочное действие элементов, образующихся при взрыве и дроблении корпуса.
Состав боевого снаряжения 1. Боевая часть. 2. Взрыватель. 3. Взрывной генератор. 1. Боевая часть предназначена для создания заданного поля поражения, воздействующего на цель после получения от взрывателя инициирующего импульса. Боевая часть состоит из следующих элементов: а) корпус; б) боевой заряд; в) детонатор; г) трубка. Корпус выполнен из высокопрочной стали. Он представляет собой цилиндрическую деталь с толщиной стенок 3 мм. С торцов корпус имеет посадочные места и места крепления с соседними отсеками (РО и ДУ). Кроме того, на корпусе имеется бугель с отверстием, который при соединении заходит глубоко в рулевой отсек. В бугель при сборке входит стопор трубы, предназначенный для фиксации в ней ракеты. Внутри корпус имеет насечку специальной формы, позволяющей при подрыве боевого заряда образовывать заданное дробление на осколки. Боевой заряд представляет собой взрывчатое вещество (ВВ), запрессованное в корпус БЧ. ВВ изготовлено из вещества 0КФАЛ-20 (взрывчатая механическая смесь на основе октогена). ВВ имеет достаточно высокие характеристики детонации — 8000 м/с — и в то же время отвечает требованию отсутствия детонации при случайных воздействиях, например падении, простреле и т. п. Для подрыва боевого заряда необходимо оказать на него определенное энергетическое воздействие с высокой скоростью по всей торцевой поверхности. Для этих целей служит детонатор. Детонатор представляет собой заряд ВВ, более чувствительного к инициирующему воздействию со стороны взрывателя. В БЧ детонатор размещён непосредственно рядом с боевым зарядом и удерживается механической манжетой. Так как взрыватель расположен за боевым зарядом, то для его связи с РО (для получения питания) в боевом заряде имеется отверстие, сформированное установленной в этом месте трубкой. Через трубку протянуты четыре провода. Необходимо отметить, что при способе заданного дробления образуются осколки 0,4—0,5 г, что позволяет им наносить эффективное поражение, в то время как при подрыве БЧ с гладким корпусом часть металла превращается в пыль и мелкие осколки. 2. Взрыватель (9Э249) предназначен для выдачи импульса на подрыв заряда БЧ при попадании ракеты в цель или по истечению времени самоликвидации, а также для передачи импульса от заряда БЧ к взрывному генератору. Расположение взрывателя за боевым зарядом обусловлено тем, что он должен сработать после проникновения боевой части внутрь цели. При ударе корпусные элементы ракеты разрушаются вследствие больших нагрузок и в таком виде проникают внутрь цели. Взрыватель же, находясь за основным зарядом, успевает выдать импульс на его подрыв до своего разрушения, но при проникновении заряда внутрь цели. Взрыватель относится к электромеханическому типу. Он имеет две ступени предохранения, которые снимаются в полёте, чем обеспечивается безопасность при эксплуатации комплекса.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-17; просмотров: 1024; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.45.16 (0.019 с.) |


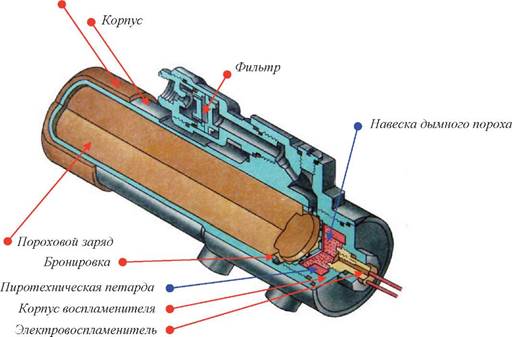 Рис. 40. Устройство ПАД
Рис. 40. Устройство ПАД