Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематический анализ механизма методом диаграммСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Построение диаграммы перемещения выходного звена
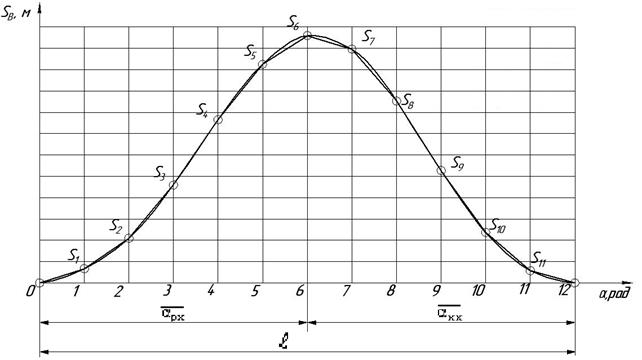
Диаграмма перемещения выходного звена строится в зависимости от функции времени. При ω1 = const каждому моменту времени соответствует определенный угол поворота кривошипа. В связи с этим по оси абсцисс откладывают не только время, но и угол α поворота кривошипа, которому соответствует определенное его положение. На оси абсцисс диаграммы (рис. 6) откладываем отрезок 0 – 12 длиной ℓ=180 (или 240) мм. Он изображает в масштабе μα угол поворота кривошипа, равный 3600 или 2π. Тогда масштабный коэффициент μα будет вычисляться по формуле:
Если угол измеряется в радианах, то
Отрезок ℓ изображает и время tц одного полного оборота кривошипа. Его можно вычислить следующим образом:
Тогда масштабный коэффициент Масштабный коэффициент μs оси ординат примем равным μℓ (масштабный коэффициент разметки). μs = Для построения диаграммы перемещения (рис. 6) определим длину отрезка
Отрезок Из точек 1, 2, 3 ….. 12 оси абсцисс диаграммы проводим к ней перпендикуляры, на которых откладываем отрезки В0В1, В0В2, В0В3 и т.д., изображающие перемещение ползуна в 1-м, 2-м, 3-м и т.д. положениях механизма. Полученные точки соединим плавной кривой. Это и есть диаграмма перемещения.
Рис. 6. График перемещения точки В
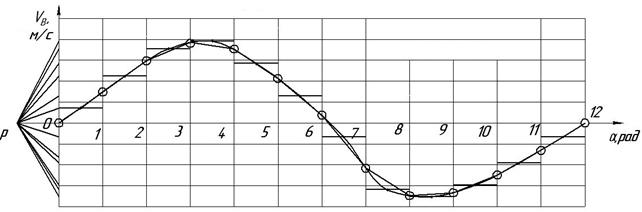
Построение диаграммы скорости выходного звена Диаграмма скорости точки В строится методом графического дифференцирования, способом хорд. Данный метод заключается в следующем: • Проводим хорду, которая соединяет концы начальной и конечной ординат кривой на данном временном интервале (рис. 6). • На продолжении оси абсцисс диаграммы скоростей (рис. 7) выбираем произвольную точку Р (в данном случае 0Р=20 мм) в качестве полюса. Из этой точки проводим до пересечения с осью ординат луч, параллельный хорде, и на оси ординат получаем отрезок, изображающий в некотором масштабе величину средней скорости ползуна на данном временном интервале. • Эти построения выполняем для всех временных интервалов. В результате получим ряд точек, каждая из которых расположена в середине соответствующего временного интервала. Затем соединяем эти точки плавной кривой и получаем искомый график (рис. 7).
Рис. 7. Диаграмма скорости ползуна
Масштабный коэффициент μv диаграммы:
где Н = 0Р (мм).
Построение диаграммы ускорения выходного звена
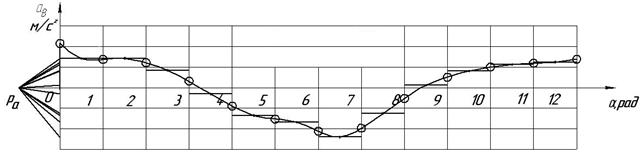
Диаграмму ускорения точки В строим вести методом графического дифференцирования диаграммы скоростей V(t). • Проводим хорду (рис. 7), которая соединяет концы начальной и конечной ординат кривой на данном временном интервале. • На оси абсцисс (рис. 8) выбираем произвольную точку Ра (в данном случае 0Ра=20 мм) в качестве полюса. Из этой точки проводим до пересечения с осью ординат луч, параллельный хорде. На оси ординат получаем отрезок, изображающий в некотором масштабе среднюю величину ускорения на рассматриваемом интервале. • Таким же образом определяем среднее ускорение на всех остальных интервалах. В результате получим ряд точек, каждая из которых расположена в середине соответствующего интервала. Затем соединяем эти точки плавной кривой и получаем искомый график (рис. 8).
Рис. 8. Построение графика ускорений точки В
Н1 = 0Ра. Силовой расчет механизма
Проектирование нового механизма всегда включает его силовое исследование, так как по найденным силам производится последующий расчет на прочность элементов кинематических пар и звеньев механизма. При силовом исследовании решаются следующие основные задачи а) определяются силы, действующие на звенья и реакции в кинематических парах; б) определяется уравновешивающая сила (момент силы). В курсовом проекте силовой расчет выполняется методом кинетостатики[2]. Метод кинетостатики основан на принципе Даламбера, который применительно к механизмам можно сформулировать так: если ко всем внешним силам, действующим на систему звеньев, добавить силы инерции, тогда под действием всех этих сил система звеньев может условно считаться находящейся в равновесии. При кинетостатическом расчете кинематическую цепь механизма разбиваем на группы Ассура, которые являются статически определимыми. Расчет ведем путем последовательного рассмотрения условий равновесия отдельно каждой группы, начиная с наиболее удаленной от исходного механизма, последним рассчитывается ведущее звено. Определение реакций в кинематических парах механизма ведем без учета сил трения.
|
||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 3173; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.192.250 (0.007 с.) |

 =
= 
 =
= 

 = с/мм.
= с/мм. , который в масштабе μα изображает угол рабочего хода (угол между крайними положениями кривошипа во время рабочего хода механизма).
, который в масштабе μα изображает угол рабочего хода (угол между крайними положениями кривошипа во время рабочего хода механизма). = мм.
= мм. разделим на 6 равных частей и обозначим соответствующие холостому ходу положения механизма. Это – 7, 8, 9, 10, 11 и 12 положения.
разделим на 6 равных частей и обозначим соответствующие холостому ходу положения механизма. Это – 7, 8, 9, 10, 11 и 12 положения.