Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Устройство,принцип действия, режимы работы АМСодержание книги Похожие статьи вашей тематики
Поиск на нашем сайте Неподвижная часть АМ, называемая статором, представляет собой полый шихтованный цилиндр (сердечник статора) с продольными пазами на внутренней поверхности, располагаемый внутри одного из элементов оболочки машины, называемого станиной. В пазах сердечника статора уложена обмотка статора. Сердечник статора изготовлен из листовой электротехнической стали Листы электротехнической стали изолированы друг от друга. Вращающаяся часть АМ, называемая ротором, располагается во внутренней полости сердечника статора и состоит из сердечника ротора, обмотки и вала. Ротор и статор разделены воздушным зазором. На наружной поверхности сердечника ротора имеются продольные пазы, в которых размещается обмотка ротора. Ротора могут выполняться двух видов: фазные и к.з.. Обмотка фазного ротора подобна обмотке статора, и клеммы начал ее фаз электрически соединяются с контактными кольцами на валу, изолированными друг от друга и от вала. Обмотка к.з. ротора отливается из сплава алюминия. Сплав заполняет пазы сердечника ротора и электрически соединяет их между собой торцевыми замыкающими. На валу расположены два подшипника, устанавливаемые в подшипниковых щитах,которые крепятся к станине. На станине располагается коробка выводов, внутри которой закреплены клеммы обмотки статора и к ним подводится питающее напряжение. Вращающееся поле статора пересекает проводники обмотки ротора и наводит в них ЭДС.и т.к. обмотка ротора замкнута, то в стержнях возникают токи. Взаимодеиствие этих токов с полем статора создает на проводниках обмотки ротора электромагнитные силы FПР, направление которых определяется по правилу левой руки.Силы FПР стремятся повернуть ротор в направлении вращения магн. Поля статора. Совокупность сил FПР , приложенных к отдельным проводникам, создает на роторе электромагнитный момент М, приводящий его во вращение со скоростью п2.Скорость вращения ротора п2 АД всегда меньше скорости вращения поля п1. Разность скоростей ротора и вращающегося поля статора характеризуется скольжением S=(n1-n2)/n1.
10.Двигательный режим работы АД. Двигательный режим. При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи. В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор АД приходит во вращение с частотой п2<п1 в сторону вращения поля статора. Если вал АД механически соединить с валом какого-либо исполнительного механизма, то вращающий момент двигателя М преодолев противодействующий (нагрузочный) момент Мнагр исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность P2 и передается исполнительному механизму. АД описывается уравнениями:
Уравнениям напряжений и токов, а также векторной диаграмме асинхронного двигателя соответствует электрическая схема замещения асинхронного двигателя(Т). Магнитная связь обмоток статора и ротора в асинхронном двигателе на схеме замещения заменена электрической связью цепей статора и ротора. Активное сопротивление R2’=(1 - S)/S можно рассматривать как внешнее сопротивление, включенное в обмотку неподвижного ротора.
Потери разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Рэ1 эл. потери в об-ке статора, Рэ2 эл. потери в об-ке ротора Механические потери Рмех — это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора.Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5 % от подводимой к двигателю мощности Р1. 11.Двигательный режим работы АД. Двигательный режим. При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи. В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор АД приходит во вращение с частотой п2<п1 в сторону вращения поля статора. Если вал АД механически соединить с валом какого-либо исполнительного механизма, то вращающий момент двигателя М преодолев противодействующий (нагрузочный) момент Мнагр исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность P2 и передается исполнительному механизму. АД описывается уравнениями:
Т.к. с ростом Р2 нагрузка на ротор двигателя увеличивается то ротор начинает притормаживаться и обороты его уменьшаются (п2 уменьшается). Зависимость полезного момента на валу АД от мощности определяется вырожением М2~Р2/п2 и следовательно с ростом Р2 (из-за уменьшения п2) М2 растет быстрее чем по прямои пропорциональной зависимости. Т.к. в АД ток статора имеет реактивную составляющую для создания магнитного поля статора cos
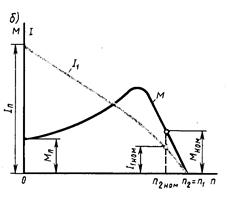
Пуск АД с кз ротором. Пуск асинхронного двигателя сопровождается переходным процессом, обусловленным переходом ротора, и механически связанных с ним частей исполнительного механизма, из состояния покоя в состояние равномерного вращения, когда вращающий момент двигателя уравновешивается суммой противодействующих моментов, действующих на ротор двигателя. Пусковые свойства двигателя определяются в первую очередь значением пускового тока Iп или его кратностью IП/Iном и значением пускового момента Мп или его кратностью Мп/МНОМ. В начальный момент пуска скольжение s=l, поэтому, пренебрегая током х. х., пусковой ток можно определить:
Пусковой момент по
1) АД должен развивать достаточно большой пусковой момент, достаточный для преодоления статического момента сопротивления на валу. 2) Величена пускового тока должна быть ограничена такой величиной, чтобы не происходило повреждения АД и нарушения нормального режима работы сети. Помимо пусковых значений тока и момента пусковые свойства двигателей оцениваются еще и такими показателями: продолжительность и плавность пуска, сложность пусковой операции, ее экономичность (стоимость и надежность пусковой аппаратуры и потери энергии в ней).
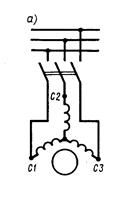
Способы пуска: Пуск непосредственным включением в сеть Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке статора возникает большой пусковой ток, в 5—7 раз превышающий номинальный ток двигателя. Пуск при пониженном напряжении. Пусковой ток двигателя пропорционален подведенному напряжению уменьшение которого вызывает соответствующее уменьшение пускового тока. Существует несколько способов понижения подводимого к двигателю напряжения: 1)реакторный способ, 2)автотрансформаторный(При этом пусковой ток двигателя, измеренный на выходе автотрансформатора, уменьшается в кА раз, где кА — коэффициент трансформации автотрансформатора.), 3) пуск переключением звезда-треугольник(В момент подключения двигателя к сети переключатель ставят в положение «звезда», при котором обмотка статора оказывается соединенной в звезду. При этом фазное напряжение на статоре понижается в Ö3 раз. Во столько же раз уменьшается и ток в фазных обмотках двигателя.)
Пуск АД с фазным ротором
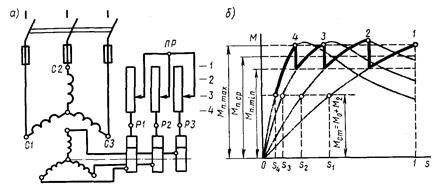
При пуске АД должны соблюдаться следующие требования. 1) АД должен развивать достаточно большой пусковой момент, достаточный для преодоления статического момента сопротивления на валу. 2) Величена пускового тока должна быть ограничена такой величиной, чтобы не происходило повреждения АД и нарушения нормального режима работы сети. Помимо пусковых значений тока и момента пусковые свойства двигателей оцениваются еще и такими показателями: продолжительность и плавность пуска, сложность пусковой операции, ее экономичность (стоимость и надежность пусковой аппаратуры и потери энергии в ней). Наличие контактных колец у двигателей с фазным ротором позволяет подключить к обмотке ротора пусковой реостат (ПР). При этом активное сопротивление цепи ротора увеличивается до значения R2=r2’+rд’, где rд’ — электрическое сопротивление пускового реостата, приведенное к обмотке статора. Пуск асинхронного двигателя сопровождается переходным процессом, обусловленным переходом ротора, и механически связанных с ним частей исполнительного механизма, из состояния покоя в состояние равномерного вращения, когда вращающий момент двигателя уравновешивается суммой противодействующих моментов, действующих на ротор двигателя. Пусковые свойства двигателя определяются в первую очередь значением пускового тока Iп или его кратностью IП/Iном и значением пускового момента Мп или его кратностью Мп/МНОМ. В начальный момент пуска скольжение s=l, поэтому, пренебрегая током х. х., пусковой ток можно определить:
Пусковой момент по
При выборе сопротивления пускового реостата rд’ исходят из условий пуска двигателя: если двигатель включают при значительном нагрузочном моменте на валу, сопротивление пускового реостата выбирают таким, чтобы обеспечить наибольший пусковой момент, если же двигатель включают при небольшом нагрузочном моменте на валу, когда пусковой момент не имеет решающего значения для пуска, оказывается целесообразным сопротивление rд’ выбирать несколько больше значения, соответствующего наибольшему пусковому моменту. В этом случае пусковой момент оказывается несколько меньшим наибольшего значения, но зато величина пускового тока значительно уменьшается. В процессе пуска двигателя ступени ПР переключают таким образом, чтобы ток ротора оставался приблизительно неизменным, а среднее значение пускового момента было близко к наибольшему. Так, в начальный момент пуска (первая ступень реостата) пусковой момент равен Мпмакс. По мере разгона АД его момент уменьшается по кривой 1. Как только значение момента уменьшится до значения Mпmin, рычаг реостата переводят на вторую ступень и сопротивление реостата уменьшается. Теперь зависимость М=f(s ) выражается кривой 2 и пусковой момент двигателя вновь достигает Мпмакс. Затем ПР переключают на третью и на четвертую ступени (кривые 3 и 4). После того как электромагнитный момент двигателя уменьшится до значения, равного значению противодействующего момента на валу двигателя, частота вращения ротора достигнет установившегося значения и процесс пуска двигателя будет закончен. В течение всего процесса пуска значение пускового момента остается приблизительно постоянным, равным Мп.ср. Следует иметь в виду, что при слишком быстром переключении ступеней реостата пусковой ток может достигнуть недопустимо больших значений.
|
|||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 974; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.141 (0.014 с.) |

 Двигательный режим. Под действием электромагнитного вращающего момента ротор АД приходит во вращение с частотой п2<п1 в сторону вращения поля статора. Если вал АД механически соединить с валом какого-либо исполнительного механизма, то врашаюший момент двигателя М преодолев противодействующий момент Мнагр исполнительного механизма(ИМ), приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность P2 и передается ИМ. Генераторный режим. Если обмотку статора включить в сеть, а ротор АМ посредством приводного двигателя(ПД), являющегося источником механической энергии, вращать в направлении вращения магнитного поля статора с частотой п2>п1, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом работы этой машины), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора, изменит свое направление. Электромагнитный момент на роторе М также изменит свое направление, т. е. будет направлен встречно вращающемуся магнитному полю статора и станет тормозящим по отношению к вращающемуся моменту приводного двигателя М. В этом случае мех. мощность ПД в основной своей части будет преобразована в электрическую активную мощность Р2 переменного тока. Режим торможения противовключением. Если у работающего трехфазного АД поменять местами любую пару подходящих к статору из сети присоединительных проводов, то вращающееся поле статора изменит направление вращения на обратное. При этом ротор АМ под действием сил инерции будет продолжать вращение в прежнем направлении. Другими словами, ротор и поле статора АМ будут вращаться в противоположных направлениях. В этих условиях электромагнитный момент АМ, направленный в сторону вращения поля статора, будет оказывать на ротор тормозящее действие. Этот режим работы АМ называется электромагнитным торможением противовключением. Активная мощность, поступающая из сети в АМ при этом режиме, частично затрачивается на компенсацию механической мощности вращающегося ротора, т. е. на его торможение.
Двигательный режим. Под действием электромагнитного вращающего момента ротор АД приходит во вращение с частотой п2<п1 в сторону вращения поля статора. Если вал АД механически соединить с валом какого-либо исполнительного механизма, то врашаюший момент двигателя М преодолев противодействующий момент Мнагр исполнительного механизма(ИМ), приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность P2 и передается ИМ. Генераторный режим. Если обмотку статора включить в сеть, а ротор АМ посредством приводного двигателя(ПД), являющегося источником механической энергии, вращать в направлении вращения магнитного поля статора с частотой п2>п1, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом работы этой машины), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора, изменит свое направление. Электромагнитный момент на роторе М также изменит свое направление, т. е. будет направлен встречно вращающемуся магнитному полю статора и станет тормозящим по отношению к вращающемуся моменту приводного двигателя М. В этом случае мех. мощность ПД в основной своей части будет преобразована в электрическую активную мощность Р2 переменного тока. Режим торможения противовключением. Если у работающего трехфазного АД поменять местами любую пару подходящих к статору из сети присоединительных проводов, то вращающееся поле статора изменит направление вращения на обратное. При этом ротор АМ под действием сил инерции будет продолжать вращение в прежнем направлении. Другими словами, ротор и поле статора АМ будут вращаться в противоположных направлениях. В этих условиях электромагнитный момент АМ, направленный в сторону вращения поля статора, будет оказывать на ротор тормозящее действие. Этот режим работы АМ называется электромагнитным торможением противовключением. Активная мощность, поступающая из сети в АМ при этом режиме, частично затрачивается на компенсацию механической мощности вращающегося ротора, т. е. на его торможение.
 где
где  ток ротора, приведенный к обмотке статора. Для АД можно построить векторную диаграмму. Основанием для построения этой диаграммы являются уравнение токов и уравнения напряжений обмоток статора и ротора. Векторные диаграммы для cтроится для одной фазы по основным ур – ям транса. При построении считаем что все величины необходимые для построения заданы. Вектор I0 опережает по фазе Ф на угол
ток ротора, приведенный к обмотке статора. Для АД можно построить векторную диаграмму. Основанием для построения этой диаграммы являются уравнение токов и уравнения напряжений обмоток статора и ротора. Векторные диаграммы для cтроится для одной фазы по основным ур – ям транса. При построении считаем что все величины необходимые для построения заданы. Вектор I0 опережает по фазе Ф на угол  , Е1 и Е2 отстают по фазе от Ф на 90 град. Вектор I’2 отстает по фазе от Е’2 на
, Е1 и Е2 отстают по фазе от Ф на 90 град. Вектор I’2 отстает по фазе от Е’2 на 

 Преобразование электрической энергии в механическую в АД связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2 всегда меньше мощности на входе (потребляемой мощности) P1 на величину потерь S Р:
Преобразование электрической энергии в механическую в АД связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2 всегда меньше мощности на входе (потребляемой мощности) P1 на величину потерь S Р: Магнитные потери Рм в АД вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания.Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке:
Магнитные потери Рм в АД вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания.Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке:



 где ток ротора, приведенный к обмотке статора.
где ток ротора, приведенный к обмотке статора.
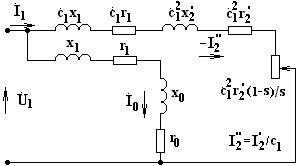
 Уравнениям напряжений и токов, а также векторной диаграмме асинхронного двигателя соответствует электрическая схема замещения асинхронного двигателя(Г),у которой намагничивающий контур (Z0= R0 + jХ0) вынесен на входные зажимы схемы замещения. Чтобы при этом намагничивающий ток Iо не изменил своего значения, в этот контур последовательно включают сопротивления обмотки статора R1 и Х1. Полученная таким образом схема удобна тем, что она состоит из двух параллельно соединенных контуров: намагничивающего с током Iо и рабочего с током -I2.Расчет параметров рабочего контура Г-образной схемы замещения требует уточнения, что достигается введением в расчетные формулы коэффициента C1, представляющего собой отношение напряжения сети U1 к ЭДС статора Е1при идеальном холостом хх.Обычно принимают С1=1. На основании схемы замещения можно рассматривать баланс реактивных мощностей АД.Из первичнои цепи потребляется реактивная мощность Q1=m1U1I1sinj1.На создание полей рассеяния первичной цепи расходуется реак. Мощность q1=m1I12x1.Реактивная мощность Qм=m1I02x0 расходуется на создание основного маг. поля машины, а мощность q2=m2I22x2 на создание вторичных полеи рассеяния. Рабочие хар-ки снимаются при U1=UН=const,f1=fН= const.
Уравнениям напряжений и токов, а также векторной диаграмме асинхронного двигателя соответствует электрическая схема замещения асинхронного двигателя(Г),у которой намагничивающий контур (Z0= R0 + jХ0) вынесен на входные зажимы схемы замещения. Чтобы при этом намагничивающий ток Iо не изменил своего значения, в этот контур последовательно включают сопротивления обмотки статора R1 и Х1. Полученная таким образом схема удобна тем, что она состоит из двух параллельно соединенных контуров: намагничивающего с током Iо и рабочего с током -I2.Расчет параметров рабочего контура Г-образной схемы замещения требует уточнения, что достигается введением в расчетные формулы коэффициента C1, представляющего собой отношение напряжения сети U1 к ЭДС статора Е1при идеальном холостом хх.Обычно принимают С1=1. На основании схемы замещения можно рассматривать баланс реактивных мощностей АД.Из первичнои цепи потребляется реактивная мощность Q1=m1U1I1sinj1.На создание полей рассеяния первичной цепи расходуется реак. Мощность q1=m1I12x1.Реактивная мощность Qм=m1I02x0 расходуется на создание основного маг. поля машины, а мощность q2=m2I22x2 на создание вторичных полеи рассеяния. Рабочие хар-ки снимаются при U1=UН=const,f1=fН= const. АД меньше 1. Наименьшее значение cos
АД меньше 1. Наименьшее значение cos 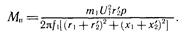

 При пуске АД должны соблюдаться следующие требования.
При пуске АД должны соблюдаться следующие требования.
 Более универсальным является способ пуска понижением подводимого к двигателю напряженияпосредством реакторов (реактивных катушек—дросселей). Порядок включения двигателя в этом случае следующий. При разомкнутом рубильнике 2 включают рубильник 1. При этом ток из сети поступает в обмотку статора через реакторы Р, на которых происходит падение напряжения jInXp (где Хр — индуктивное сопротивление реактора). В результате на обмотку статора подается пониженное напряжение U1’ = UНОМ - jInXp. После разгона ротора двигателя включают рубильник 2 и подводимое к обмотке статора напряжение оказывается номинальным. Недостаток этого способа пуска состоит в том, что уменьшение напряжения в U1’/UНОМраз сопровождается уменьшением пускового момента Мп в ( U1’/UНОМ )2 раз.
Более универсальным является способ пуска понижением подводимого к двигателю напряженияпосредством реакторов (реактивных катушек—дросселей). Порядок включения двигателя в этом случае следующий. При разомкнутом рубильнике 2 включают рубильник 1. При этом ток из сети поступает в обмотку статора через реакторы Р, на которых происходит падение напряжения jInXp (где Хр — индуктивное сопротивление реактора). В результате на обмотку статора подается пониженное напряжение U1’ = UНОМ - jInXp. После разгона ротора двигателя включают рубильник 2 и подводимое к обмотке статора напряжение оказывается номинальным. Недостаток этого способа пуска состоит в том, что уменьшение напряжения в U1’/UНОМраз сопровождается уменьшением пускового момента Мп в ( U1’/UНОМ )2 раз.