
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Миколаївський будівельний коледжСодержание книги Похожие статьи вашей тематики
Поиск на нашем сайте
КИЇВСЬКОГО НАЦІОНАЛЬНОГО УНІВЕРСИТЕТУ БУДІВНИЦТВА І АРХІТЕКТУРИ
ПРОЕКТУВАННЯ ПРИВОДІВ ЗАСОБІВ МЕХАНІЗАЦІЇ БУДІВНИЦТВА Методичні вказівки до виконання індивідуальної роботи з дисципліни «Системи конструювання приводів» зі спеціальності 6.090200 “Підйомно-транспортні, будівельні, дорожні, меліоративні машини і обладнання” за напрямом підготовки 0902 “Інженерна механіка”
Миколаїв 2010
Укладач: викладач спецдисциплін МБК КНУБА Лисак С.І.
Розглянуто і схвалено: - на засіданні циклової комісії спеціальних дисциплін напрямку підготовки 0902 «Інженерна механіка» (протокол № __ від «__» ____________ 2010р.); Голова циклової комісії Аржаєв Г.О. ____________
- на засіданні методичної ради коледжу (протокол № __ від «__» ____________ 2010р). Голова методичної ради коледжу Бондаренко Г.Г.____________ ЗМІСТ 1. Загальні положення………………………………………………………4 2. Опис улаштування будівельної машини та принципу роботи його механізмів……………………………………………………………….5 3. Розробка модифікованих схем приводу робочого органа та їх кінематичний розрахунок………………………………………………5 4. Техніко-економічне порівняння кінематичних схем приводу робочого органа…………………………………………………………15 5. Розрахунок передач приводу робочого органа в системі АРМ WinMachine………………………………………………………………23 6. Технічний контроль роботи приводу…………………………………..40 Перелік використаних джерел………………………………………….43 ДОДАТОК А – Технічні характеристики двигунів та насосів будівельних машин……………………………………44 ДОДАТОК Б – Конструктивні елементи приводів будівельних машин і механізмів……………………………………54 ДОДАТОК В – Умовні графічні позначення в кінематичних схемах…………………………………………………??
Загальні положення Робочою навчальною програмою дисципліни «Системи конструювання приводів» підготовки бакалаврів інженерної механіки зі спеціальності 6.090200 передбачено виконання індивідуальної роботи з метою покращення якості підготовки фахівців шляхом закріплення та поглиблення знань, отриманих на лекціях, лабораторних та практичних заняттях, при самостійному вивченні теоретичного матеріалу, а також удосконалення навичок застосування в приводах будівельних машин двигунів та передач раціональних параметрів виходячи зі специфіки умов його роботи. Вибір та обґрунтування кінематичних схем є першим етапом проектування приводу робочого органа (РО) або виконавчої ланки. Кінематична схема будується в залежності від призначення та умов роботи машини. Передачі, які встановлюються між двигуном та РО призначені для виконання цілого ряду функцій, головними з яких є: - пониження або підвищення швидкості на РО; - підвищення або пониження крутного моменту; - зміна траєкторії або характеру руху; - зміна наряму руху (реверсуваня); - зміна площини руху; - складання рухів та моментів від декількох двигунів; - регулювання та зміна швидкості; - запобігання деталей та вузлів машини від поломок при перевантаженнях. Вибір кінематичної схеми багато в чому залежить від двигуна, який використовується для приводу, і вимог, що висуваються до робочої машини (характер і траєкторія руху, швидкість, крутний момент і т.д.). Двигуни в залежності від форми траєкторії руху його ведучого органу можуть бути з обертальним та зворотно-поступальним рухом. Робочі органи за формою траєкторії поділяються на обертальні, зворотно-поступальні, з хитальним та складним рухом, а за характером руху з монотонним, різноманітним та циклічним рухом. В машинах з монотонним рухом робочого робочого органа швидкість постійна і тривалий час направлена в одну сторону. Двигун в таких машинах безпосередньо з’єднаний з робочим органом або між ними встановлюється деяка передача (зубчаста, ланцюгова, пасова і т.д.). прикладами таких машин можуть бути промислові вентилятори, транспортери тощо. Машини з різноманітним рухом мають змінний силовий або швидкісний режими, які змінюються вручну або автоматично. В таких машинах між двигуном та робочим органом повинна бути встановлена керована передача (коробка швидкостей, варіатор тощо). Прикладами машин з різноманітним рухом є транспортні машини, верстати і т.д. Машини, що відносяться до третьої групи, характеризуються тим, що рух їх робочого органа відбувається за встановленим циклом, який визначається умовами роботи машини або характером технологічного процесу. За таким принципом працюють різноманітні автомати, механізм газорозподілу ДВЗ, дозатори тощо. В кінематичні схеми таких машин зазвичай включаються механізми, які дозволяють встановлювати (задавати) і регулювати роботу машини, кулачкові і кулісні механізми, механізми мальтійського хреста, важільні механізми. Вимоги, які висуваються до приводу робочого органа або вихідної ланки, можуть бути виконані із використанням різних варіантів передач та їх кінематичних схем. Задача проектувальника полягає в розробці і виборі оптимальних передач на основі їх оцінки за критеріями порівняння.
Опис улаштування будівельної машини та принципу Роботи його механізмів У 1-му розділі індивідуальної роботи наводяться наступні дані: - призначення та область застосування будівельної машини; - конструкції робочих органів; - робочий процес; - опис кінематичних схем приводу механізмів машини або робочих органів. В якості будівельних машин можуть бути вибрані як машини для земляних робіт, підйомно-транспортні машини, так і дорожні, меліоративні тощо. В прийнятій будівельній машині вибирається механізм приводу виконавчої ланки або робочого органу, наприклад, привод ходових коліс баштового крана, механізм поворотної платформи одноківшевого екскаватора, привод робочого органа шнеко-роторного снігоочисника тощо, і описується принцип його роботи на основі наведеної кінематичної схеми.
Розробка модифікованих схем приводу робочого органа та їх кінематичний розрахунок
Розробка модифікованих кінематичних схем виконується з метою вибору та обгрунтування кращого варіанту приводу виконавчих ланок або робочих органів за різними показниками (вагою, вартістю, якістю, зручністю компоновки та технічного обслуговування і т.д.) [1]. Для цього наводиться базова (номінальна) кінематична схема приводу (за технічною документацією машини) та декілька (до 5) модифікованих. Модифіковані схеми можуть мати різну компоновку обладнання, різні види передач, але із збереженням необхідних параметрів, які передаються виконавчій ланці або РО від приводного двигуна (швидкостей – поступальних і обертальних, потужностей, характеру руху тощо). Рекомендуємі види передач для різних поєднань рухів приводного двигуна та РО (виконавчої ланки) наведено в табл.3.1.
Таблиця 3.1. Вид передачі
Найбільше поширення в сучасних машинах отримали передачі, які здійснюють обертальний та поступальний рух. При необхідності проектування приводів, передачі яких здійснюють інші види рухів, рекомендується література [8,9,10].
Правила виконання кінематичних схем [12]: 1. Кінематичну схему приводу викреслюють, як правило, у вигляді розгортки. Також допускається їх викреслювати в аксонометричних проекціях. 2. Всі елементи на схемі показують умовними графічними позначеннями або спрощеними зовнішніми контурами. 3. Взаємне розміщення елементів на кінематичній схемі повинне відповідати вихідному, середньому або робочому положенню робочого органа. Якщо при роботі елемент змінює своє положення, то допускається показувати його крайні положення тонкими штрихпунктирними лініями з двома точками. 4. На кінематичні схемі, не порушуючи її ясності, допускається: переносити елементи вверх або вниз від їхнього дійсного положення, виносити їх за контур платформи, на якій встановлюється привод, не змінюючи положення; повертати елементи в положення, найбільш зручне для зображення. В цих випадках спряжені ланки пари, що викреслені окремо, з’єднують штриховою лінією. 5. Якщо вали та осі при зображені на схемі перетинаються, то лінії, що їх зображують, в місцях перетину не розривають. Якщо на схемі вали та осі закриті іншими елементами або частинами механізмів, то їх зображають як невидимі. 6. Співвідношення розмірів умовних графічних зображень взаємодіючих елементів на схемі повинно приблизно відповідати дійсному співвідношенню розмірів цих елементів. 7. На кінематичній схемі приводу вказують: найменування кожної кінематичної групи елементів (наприклад, «головний фрикціон», «коробка передач»), які наносять на полицях ліній-виносок, проведених від відповідних груп; основні характеристики та параметри кінематичних елементів. 8. Допускається наводити: граничні числа обертів валів кінематичних ланцюгів; довідникові та розрахункові дані (у вигляді графіків, діаграм, таблиць), що показують послідовність процесів в часі і пояснюють зв’язки між окремими елементами. 9. Кожному кінематичному елементу, що зображається на схемі, як правило, присвоюють порядковмй номер, починаючи від джерела руху (двигуна). Вали та інші елементи нумерують арабськими цифрами. Порядковий номер елемента проставляють на полиці лінії-виноски, а під полицею вказують основні характеристики та параметри кінематичного елемента (якщо вказується позиція шестерні, то під полицею вказується кількість зуб’їв та модуль; якщо приводний двигун, то під полицею вказується потужність та частота обертання). Умовні графічні позначення в кінематичних схемах наведені в додатку В. Приклад 3.1. Розробка модифікованих схем приводу змішувального барабану асфальтобетонного змішувача. Наведемо загальну кінематичну схему приводу механізмів асфальтобетонного змішувача (рис.3.1).
Рис.3.1.Кінематична схема приводу головних робочих органів асфальтобетонозмішувача: 1 - електродвигун; 2 - пасова передача; 3 - ланцюгова передача; 4 - пасова передача приводу бітумного насосу; 5 - бітумний насос; 6 - ланцюгова передача приводу елеватора для гарячи матеріалів; 7 - елеватор для гарячих матеріалів; 8 - грохот; 9 - черв'ячна передача приводу грохота; 10 - ланцюгова передача приводу елеватора заповнювача; 11 - елеватор заповнювач; 12 – муфта кулачкова; 13 - редуктор; 14 - змішувальний барабан; 15 - циліндрична передача приводу змішувального барабану; 16 - одноступінчатий редуктор приводу бітумного насосу та змішувального барабану
Для модифікації прийнято механізм приводу змішувального барабану, тому розроблені варіанти його приводу матимуть наступний вигляд (рис.3.2. – рис.3.4.).
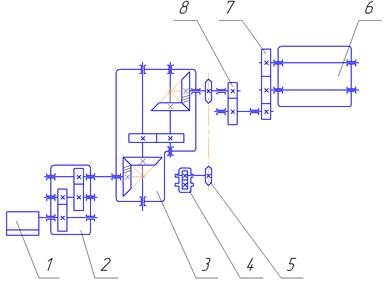
Рис. 3.2. Кінематична схема приводу змішувального барабану, варіант 1: 1 - електродвигун; 2 - двоступінчатий редуктор; 3 - двоступінчатий конічно-циліндричний редуктор; 4 - бітумний насос; 5 - ланцюгова передача приводу бітумного насосу; 6 - змішувальний барабан; 8 - циліндрична передача приводу змішувального барабану
Рис. 3.3. Кінематична схема приводу змішувального барабану, варіант 2: 1 - електродвигун; 2 - двоступінчатий редуктор; 3 - пасова передача; 4 - бітумний насос; 5 - трьохступінчатий редуктор приводу бітумного насосу та змішувального барабану; 6 - циліндрична передача приводу змішувального барабану; 7 - змішувальний барабан; 8 - конічний розподільчий редуктор
Рис. 3.4. Кінематична схема приводу змішувального барабану, варіант 3: 1 - електродвигун; 2- пасова передача; 3 - муфта зчеплення; 4 - двоступінчатий редуктор; 5 - циліндрична передача приводу бітумного насосу; 6 - бітумний насос; 7 - ланцюгова передача приводу змішувального барабану; 8 - конічний двоступінчатий редуктор змішувального барабану; 9 - конічний одноступінчатий розподільчий редуктор
Перед кінематичним розрахунком наведених схем приводу, необхідно встановити вихідні дані для їх проектування. В якості вихідних даних, залежно від виду і характеру руху виконавчої ланки механізму, може бути задано: - N р, кВт – потужність на виконавчій ланці або РО; - М р, Нм – крутний момент на виконавчій ланці або РО; - - n р, об/хв – частоту обертання; - P р, Н – зусилля на виконавчій ланці або РО; - V р, м/с – поступальну швидкість руху виконавчої ланки або РО. Для кожної модифікованої (та базової) кінематичної схеми необхідно розрахувати значення коефіцієнта корисної дії (ККД) механізму. ККД механізму може визначатись на основі укрупнених норм для окремих видів передач із табл.3.2. ККД окремих елементів передач наведені нижче: Підшипники кочення …………………………….0,99-0,995 Підшипники ковзання ……………………………0,98-0,9955 Муфти: з проміжним рухомим елементом ……………0,97-0,99 шарнірні ………………………………………..0,97-0,99 зубчасті………………………………………….0,99 пружні втулково-пальцеві……………………..0,99-0995 фрикційні………………………………………..0,85-0,95 Блоки: барабани для канатів……………………………0,94-0,97 на підшипниках кочення………………………..0,98 на підшипниках ковзання………………………0,96 варіатори………………………………………….0,92-0,95
Таблиця 3.2.
|
|||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 548; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.7.103 (0.013 с.) |




 р, рад/с – кутову швидкість обертання виконавчої ланки або РО;
р, рад/с – кутову швидкість обертання виконавчої ланки або РО;


