
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исследование системы на абсолютную устойчивостьСодержание книги
Поиск на нашем сайте
Если нелинейная функция
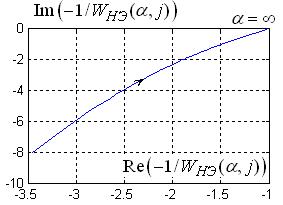
Состояние равновесия замкнутой системы (рис. 39) при Для определения абсолютной устойчивости системы можно использовать частотный критерий Попова. Практическая ценность критерия Попова состоит в его простой геометрической интерпретации. Для этого введем преобразованную частотную характеристику
1. Рассмотрим основной случай, когда передаточная функция
имеет устойчивые полюса, т.е. корни уравнения В этом случае критерий Попова формулируется следующим образом: Состояние равновесия замкнутой системы с одной стационарной нелинейностью, удовлетворяющей секторному Построение
%Желаемая передаточная функция Wgpas=75.5*tf([1/3.06 1],[1/0.7 1])*tf([1],[1/0.7 1])... *tf([1],[1/45.31 1])*tf([1],[1/45.31 1]); [Re,Im,w]=nyquist(Wgpas); Wgpasn=squeeze(Re)+j*squeeze(w).*squeeze(Im); figure(1);plot(Wgpasn);grid;%Преобразованная АФЧХ
Результат построения приведен на рис. 46, из которого следует, что для нелинейности № 1 со значением Это свойство сохраняется для Таким образом, согласно критерию Попова в замкнутой системе отсутствуют автоколебания при
Рис. 46
2. В случае, когда корни уравнения Состояние равновесия замкнутой системы с одной стационарной нелинейностью, удовлетворяющей секторному ограничению
СПИСОК ЛИТЕРАТУРЫ
Основная
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. – С.-Петербург: изд. «Профессия», 2003. 2. Теория автоматического управления / Под ред. В.Б. Яковлева – М.: Высшая школа, 2005. 3. Теория автоматического управления. Под ред. акад. А.А. Воронова. М.: Высшая школа, 1986. 4. Солодовников В.В., Плотников В.Н., Яковлев А.В. Основы теории и элементы систем автоматического регулирования. М., Машиностроение, 1985. 5. Васильев Д. В., Чуич В.Г., Системы автоматического управления. М., Высшая школа, 1967. 6. Сборник задач по теории автоматического регулирования / Под ред. Бессекерского В.А. – М., Наука. 1965. 7. Сабинин Ю.А. Электромашинные устройства автоматики. Л.: Энергоатомиздат. Ленинг. отд-ние, 1988. 8. Дегтярев Г.Л. и др. Методы динамического расчета САУ. Казань: КАИ, 1986. 9. Гаркушенко В.И., Земляков А.С., Файзутдинов Р.Н. Нелинейные и дискретные системы автоматического управления. Уч. пособие. Казань: КГТУ им. А.Н. Туполева, 2000. 10. Медведев В.С., Потемкин В.Г. Control System Toolbox. MATLAB 5 для студентов. М.: ДИАЛОГ-МИФИ, 1999. – 287с. 11. Лазарев Ю.Ф. MatLab 5.x. – К.: BHV, 2000. – 384с. 12. Дьяконов В., Круглов В. Математические пакеты расширения MATLAB. Специальный справочник. – СПб.: Питер, 2001 – 480 с.
Дополнительная
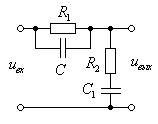
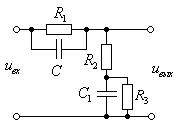
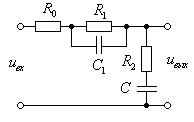
13. Методы классической и современной теории автоматического управления. Под ред. Егупова Н.Д. М.: МГТУ им.Н.Э.Баумана, 2002. Т.1. 14. Никулин Е.А. Основы теории автоматического управления. Частотные методы анализа и синтеза систем. – СПб.: БХВ-Петербург, 2004. – 640с. 15. Лурье Б.Я., Энрайт П.Дж. Классические методы автоматического управления. – СПб.: БХВ-Петербург, 2004. – 640с. 16. Дорф Р. Современные системы управления. – М.: Лаборатория Базовых Знаний, 2002. – 832с. 17. Филлипс Ч., Харбор Р. Системы управления с обратной связью. – М.: Лаборатория Базовых Знаний, 2001. – 616с. 18. Ким Д.П. Теория автоматического управления. Т.1. Линейные системы – М.: Физматлит, 2003. – 288 с. 19. Ким Д.П. Теория автоматического управления. Т.2. Многомерные, нелинейные, оптимальные и адаптивные системы – М.: Физматлит, 2004. – 464 с. 20. Востриков А.С., Французова Г.А. Теория автоматического управления. – Высш. шк., 2006. – 365 с. 21. Воронов А.А. и др. Теория автоматического управления. Ч.1. М., Высш. шк., 1977. 22. Основы автоматического управления. Под. ред. В.С. Пугачева. М., Наука, 1978. 23. Цыпкин Я.3. Основы теории автоматических систем. М., Наука, 1977. 24. Техническая кибернетика. Теория автоматического управления. Под. ред. В.В. Солодовникова. Кн.1. – М., Машиностроение, 1967. 25. Техническая кибернетика. Теория автоматического управления. Под. ред. В.В. Солодовникова. Кн.2. – М., Машиностроение, 1967. 26. Гантмахер Ф.Р. Теория матриц. – М.: 1988. – 548с. 27. Бесекерский В.А., Изранцев В.В. Системы автоматического управления с микроЭВМ. – М.: Наука.1987. – 320с. 28. Теория автоматического управления: Методические указания к курсовой работе. Под ред. И.И. Ахметгалеева. Казань: КАИ, 1979. – 61с. 29. Теория автоматического управления: Методические указания к курсовой работе. Под ред. Г.Л. Дегтярева. Казань: КАИ, 1988. – 31с. 30. Щеглов М.Ю. Электроника (часть 1): Рабочая тетрадь студента. Казань: "Отечество", 2004. – 176 с. 31. ГОСТ 7.32-2001. Отчет о научно-исследовательской работе. ПРИЛОЖЕНИЕ А. Корректирующие цепи Таблица П.1
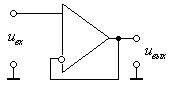
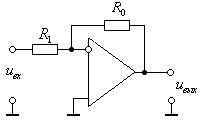
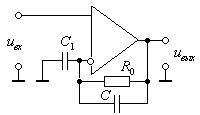
В приведенных электрических схемах в качестве начального приближения электроемкость Для большинства распространенных операционных усилителей (ОУ) входное сопротивление составляет от При выборе сопротивлений нагрузки и цепи обратной связи ОУ необходимо учитывать ограничение на максимально допустимый выходной ток ОУ, который составляет
ПРИЛОЖЕНИЕ Б. Коэффициенты гармонической линеаризации нелинейных характеристик
Таблица П.2
Таблица П.3
ПРИЛОЖЕНИЕ В. Справочные данные
Таблица П.4
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-21; просмотров: 452; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.41 (0.011 с.) |

 удовлетворяет секторному ограничению
удовлетворяет секторному ограничению  :
: ,
, 
 ,
,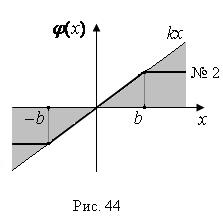 например, для нелинейностей типа № 1,2,3 (рис. 44), то для проверки отсутствия автоколебаний в замкнутой системе можно исследовать систему на абсолютную устойчивость.
например, для нелинейностей типа № 1,2,3 (рис. 44), то для проверки отсутствия автоколебаний в замкнутой системе можно исследовать систему на абсолютную устойчивость. называется абсолютно устойчивым, если оно асимптотически устойчиво в целом при любой нелинейной функции
называется абсолютно устойчивым, если оно асимптотически устойчиво в целом при любой нелинейной функции  , у которой вещественная часть совпадает с вещественной частью
, у которой вещественная часть совпадает с вещественной частью  , а мнимая часть отличается на множитель
, а мнимая часть отличается на множитель  :
:
 имеют отрицательные вещественные части. Это соответствует вариантам схем А, Б, В.
имеют отрицательные вещественные части. Это соответствует вариантам схем А, Б, В.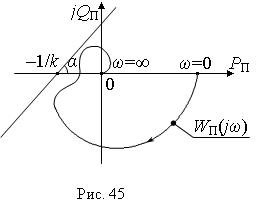 ограничению
ограничению  можно провести прямую так, чтобы характеристика
можно провести прямую так, чтобы характеристика  целиком лежала справа от этой прямой (рис. 45).
целиком лежала справа от этой прямой (рис. 45). можно провести прямую-1 через точку А
можно провести прямую-1 через точку А  так, чтобы характеристика
так, чтобы характеристика  целиком лежала справа от этой прямой и, следовательно, замкнутая система абсолютно устойчива.
целиком лежала справа от этой прямой и, следовательно, замкнутая система абсолютно устойчива. , где
, где  – критический коэффициент, соответствующий точке В
– критический коэффициент, соответствующий точке В  (прямая-2). Здесь значение
(прямая-2). Здесь значение  , что меньше ранее найденного коэффициента
, что меньше ранее найденного коэффициента  , соответствующего точке С
, соответствующего точке С  , поскольку
, поскольку  .
. (точка С) абсолютная устойчивость не гарантируется и согласно предыдущему, возможно, что состояние равновесиясистемы устойчиво в большом и неустойчиво в целом. Однако доказано [15], что в этом случае автоколебания с частотой
(точка С) абсолютная устойчивость не гарантируется и согласно предыдущему, возможно, что состояние равновесиясистемы устойчиво в большом и неустойчиво в целом. Однако доказано [15], что в этом случае автоколебания с частотой  отсутствуют, если через точку С можно провести прямую-3 слева от всех точек на кривой
отсутствуют, если через точку С можно провести прямую-3 слева от всех точек на кривой  ,
, 

 , при наличии нулевых и неустойчивых корней уравнения
, при наличии нулевых и неустойчивых корней уравнения  ,
,  , целиком лежала справа от этой прямой.
, целиком лежала справа от этой прямой. Таким образом, здесь необходимо, чтобы нелинейность
Таким образом, здесь необходимо, чтобы нелинейность  ,
,  ,
,  , если выполняется неравенство
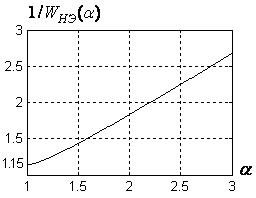
, если выполняется неравенство  , где амплитуда
, где амплитуда  найдена методом гармонической линеаризации, значение
найдена методом гармонической линеаризации, значение  определяется из графика рис. 47.
определяется из графика рис. 47.













 ,
,
 ,
,

 ,
,


 ,
,

 ,
,



 ,
,
 ,
,


 ,
,  ,
,
 ,
,
 ,
,

 можно принять равной
можно принять равной  мкФ.
мкФ. кОм (в ОУ с биполярным входным каскадом) до 100 ГОм (в ОУ с входным каскадом на полевых транзисторах). Выходное сопротивление ОУ составляет
кОм (в ОУ с биполярным входным каскадом) до 100 ГОм (в ОУ с входным каскадом на полевых транзисторах). Выходное сопротивление ОУ составляет  Ом, которое выносится во внешнюю цепь.
Ом, которое выносится во внешнюю цепь. мА при максимальном напряжении выхода 13 В.
мА при максимальном напряжении выхода 13 В.
 ,
,  при
при 
 ,
,  ,
,  ,
,
 при
при  и график функции
и график функции  ,
, 
 ,
, 

 ,
, 
 ,
, 
 ,
, 
 1 рад
1 рад 
 рад
рад
 рад
рад
 рад
рад







 Мега (М)
Мега (М)  Кило (к)
Кило (к) 
 Санти (с)
Санти (с)  Милли (м)
Милли (м) 
 Нано (н)
Нано (н)  Пико (п)
Пико (п) 



