
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Cиловые системы автоматического управленияСодержание книги
Поиск на нашем сайте
На принципиальных схемах силовых САУ рис.1-5 приняты следующие обозначения: Д – двигатель; Г – генератор; ЭМУ – электромашинный усилитель; ТГ – тахогенератор; > – электронный усилитель; МД – механический дифференциал; Р – редуктор. Для удобства в качестве промежуточных переменных на схемах вместо фактических напряжений приняты э.д.с. выходных сигналов электронного усилителя
Исходные данные
Номинальные данные электрических машин постоянного тока представлены в таблице 1. Таблица 1. Номинальные данные электрических машин постоянного тока
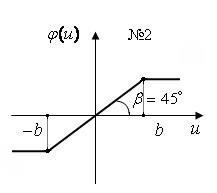
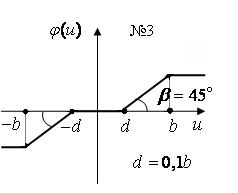
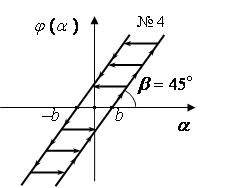
При рассмотрении схем необходимо учесть следующее: 1) Кривые намагничивания всех электрических машин предполагаются линейными в пределах рабочего режима заданных систем, гистерезис отсутствует, реакции электрических машин скомпенсированы. 2) Пренебрежимо малы индуктивности обмоток якорей всех машин. 3) Параметры короткозамкнутой цепи ЭМУ равны 4) Момент инерции ротора двигателя 5) Электронный усилитель с коэффициентом усиления 6) Параметры корректирующей 7) В схеме В сопротивления делителя напряжения 8) В схеме Б параметры управляющей обмотки возбуждения ЭМУ и обмотки обратной связи считать одинаковыми ( для стабилизирующего трансформатора со стальным сердечником приняты следующие параметры: первичная обмотка – вторичная обмотка – взаимная индукция обмоток 9) В схемах Г и Д коэффициенты передачи дифференциала и потенциометра соответственно равны 10) В схеме Д параметры делителя напряжения 11) В схемах Г и Д передаточные отношения редуктора 12) При исследовании влияния нелинейностей на динамику замкнутой системы с найденным законом управления рассматриваются нелинейные элементы с нечетно-симметричными характеристиками № 1,2,3 (рис. 6), включаемые в структурную схему системы перед электронным усилителем и нелинейный элемент № 4 только для схем Г, Д, включаемый перед редуктором двигателя. Здесь нелинейный элемент № 1 типа "зона нечувствительности" характеризует момент трогания двигателя для схем А, Б, Г, Д с параметром
Рис. 6.
1.1.2 Техническое задание
1. По заданным в соответствии с таблицей 2 показателям точности и качества переходных процессов в замкнутой САУ провести синтез непрерывной последовательной коррекции, составить ее электрическую схему, определить параметры корректирующего устройства и место его включения. Таблица 2. Требуемые показатели точности и качества
Здесь показатели качества Для схем А, Б, В значение командного сигнала Для схем А, Б, Г, Д момент нагрузки 2. Рассмотреть возможность замены непрерывной коррекции на дискретное корректирующее устройство при малых периодах дискретности. 3. Провести анализ влияния нелинейного элемента на динамику замкнутой системы при отсутствии входного сигнала и нагрузки с использованием метода гармонической линеаризации или метода абсолютной устойчивости.
Содержание пояснительной записки
Пояснительная записка (объемом не более 40 страниц) оформляется в соответствии с ГОСТ 7.32-2001 [31]. Рекомендуется оформление работы в Microsoft Word с использованием электронной версии данного пособия, с набором математических формул в редакторе Math Type 5.2, который прилагается к электронной версии данного пособия наряду с другими литературными источниками. Пояснительная записка содержит: · титульный лист (с названием задания и его шифром); · содержание; · введение; · основная часть; · заключение; · список использованных источников; · приложения. В пояснительной записке приводятся результаты расчетов в соответствии с порядком выполнения работы, описанного в разделе 2. При этом названия пунктов выполнения работы, выделенных курсором, входят в содержание пояснительной записки. В заключении приводятся основные результаты, полученные в работе. В приложение рекомендуется выносить программы расчета на выбранном алгоритмическом языке, схемы моделирования (например, в системах MATLAB, SIMULINK), графики логарифмических характеристик и т.п. Переходные процессы, иллюстрирующие результаты вычислений, следует приводить в тексте основной части пояснительной записки.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ Введение. Во введении необходимо привести: · схему системы управления, исходные данные в соответствии с шифром задания и принятыми допущениями в п.п.1.2; · краткое описание работы схемы; · функциональную схему системы; · классификацию по принципу регулирования [2, с.21-34; 3, с.9-14; 4, с.30]; · определение статизма (астатизма) системы по отношению к возмущению нагрузки и команде вида I. Расчет САУ в линейном приближении II. Расчет САУ с учетом нелинейности На первом этапе проводится расчет САУ в линейном приближении без учета имеющихся нелинейностей; на втором этапе – расчет системы при наличии одного нелинейного элемента. Расчеты проводятся с использование ПЭВМ.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-21; просмотров: 392; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.009 с.) |

 , генератора
, генератора  . При этом выходное сопротивление электронного усилителя, сопротивление якоря генератора вынесено во внешнюю цепь.
. При этом выходное сопротивление электронного усилителя, сопротивление якоря генератора вынесено во внешнюю цепь.




 кВт
кВт
 В
В
 А
А
 А
А
 рад/с
рад/с
 кг×м2
кг×м2
 Ом
Ом
 Ом
Ом
 Гн
Гн
 Ом;
Ом;  Гн.
Гн. считается идеальным с бесконечным входным сопротивлением и выходным сопротивлением R вых=10 Ом.
считается идеальным с бесконечным входным сопротивлением и выходным сопротивлением R вых=10 Ом. - цепи (в схемах А, В):
- цепи (в схемах А, В):  =4000 Ом,
=4000 Ом,  Ом,
Ом,  мкФ.
мкФ. кОм; сопротивление нагрузки
кОм; сопротивление нагрузки  Ом.
Ом. ,
,  ,
,  );
); Ом,
Ом,  Гн;
Гн; Ом,
Ом,  Гн;
Гн;  Ом (дополнительное сопротивление);
Ом (дополнительное сопротивление); .
. =1,
=1,  =114,6 В/рад.
=114,6 В/рад. кОм,
кОм,  кОм.
кОм. и платформы
и платформы  соответственно равны
соответственно равны  ,
,  .
. В; нелинейный элемент № 2 типа "насыщение" определяет ограничение управляющего напряжения на выходе электронного усилителя, связанного с величиной напряжения питания, с параметром
В; нелинейный элемент № 2 типа "насыщение" определяет ограничение управляющего напряжения на выходе электронного усилителя, связанного с величиной напряжения питания, с параметром  0 В; нелинейный элемент № 3 типа "зона нечувствительности - насыщение" сочетает свойства двух первых нелинейных элементов с параметром
0 В; нелинейный элемент № 3 типа "зона нечувствительности - насыщение" сочетает свойства двух первых нелинейных элементов с параметром  рад.
рад.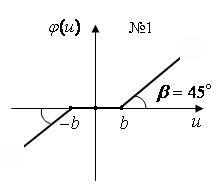
 , с
, с
 , %
, %
 и возмущению
и возмущению  )
)
 )
)
 В; для схем Г, Д командный сигнал
В; для схем Г, Д командный сигнал  ,
,  рад/с.
рад/с. ,
,  (и
(и  для схем Г, Д) методом от противного. Расчет САУ состоит из двух этапов:
для схем Г, Д) методом от противного. Расчет САУ состоит из двух этапов:


