Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Рассмотрим некоторые кривые поверхности.Содержание книги Поиск на нашем сайте
Кривые поверхности широко применяются в различных областях науки и техники при создании очертаний различных технических форм или как объекты инженерных исследований. Существуют три способа задания кривых поверхностей: 1. Аналитический - при помощи уравнений; 2. При помощи каркаса; Кинематический, т. е. перемещением линий в пространстве.
При каркасном способе задания кривая поверхность задается совокупностью некоторого количества линий, принадлежащих поверхности.
Каркас поверхности Другим способом образования поверхности и ее изображения на чертеже может служить каркас поверхности. Каркасом поверхности принято называть упорядоченное множество точек или линий, принадлежащих поверхности. В зависимости от того, чем задается каркас поверхности, точками или линиями, каркасы называют точечными или линейными. Линейным каркасом называется множество таких линий, которые имеют единый закон образования и связаны между собой определенной зависимостью. Условия связи между линиями каркаса называются зависимостью каркаса. Эта зависимость характеризуется некоторой изменяющейся величиной, которая называется параметром каркаса. Если параметр линейного каркаса является непрерывной функцией, то каркас называется непрерывным, а если параметр − прерывная функция, то каркас называется дискретным. На рис. 7.2 приведен пример каркаса поверхности, состоящей из двух ортогонально расположенных семейств линий а1, а2, а3,…, аn, b1, b2, b3,…bn.
Определитель поверхности Кинематический способ образования поверхности можно представить как множество положений движущейся линии или поверхности. Этот способ дает возможность сформулировать понятие определителя поверхности. Под этим понятием обычно подразумевают необходимую и достаточную совокупность геометрических фигур и кинематических связей между ними, которые однозначно определяют поверхность.
Определитель поверхности состоит из двух частей: 1. Геометрической части - совокупности геометрических фигур, с помощью которых можно образовать поверхность. 2. Алгоритмической части - алгоритма формирования поверхности при помощи фигур, входящих в геометрическую часть определителя. Чтобы найти определитель поверхности, следует исходить из кинематического способа образования поверхности. Для того чтобы построить чертеж поверхности, необходимо предварительно выявить ее определитель. Определитель поверхности выявляется путем анализа способов образования поверхности или ее основных свойств. В общем случае поверхность может быть образована несколькими способами и поэтому может иметь несколько определителей. Обычно из всех способов образования поверхности выбирают простейший. Поверхность на чертеже задают проекциями геометрической части ее определителя. Определитель кривой поверхности Ф может быть записан в символической форме: Ф(Г)[А], где (Г) - геометрическая часть, [А] - алгоритмическая часть. Для каждой поверхности обе части определителя имеют вполне конкретное содержание. 1. Через три точки А, В, С, не принадлежащие одной прямой, можно провести одну и только одну плоскость ( а б Рис.7.3. Примеры определителя: а) алгоритмическая часть; б) геометрическая часть
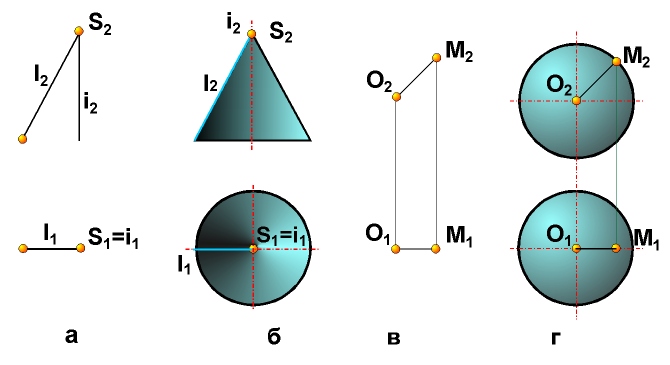
Цилиндрическая поверхность вращения может быть образо- вана вращением прямой l Геометрическая часть опре- делителя поверхности состо- ит из образующей l и оси i. Алгоритмическая часть опре- делителя состоит из операции вращения образующей линии l
Определитель цилиндрической поверхности вращения имеет вид Ф(l 1. Коническая поверхность вращения может быть образована вращением прямой l, пересекающей ось вращения i под некоторым углом (рис. 7.5, а). Алгоритмическая часть определителя состоит из словесного указания о том, что поверхность образуется вращением образующей l вокруг оси i. Определитель конической поверхности вращения имеет вид Ф(l а б Рис. 7.5. Изображение определителя конической поверхности: а) алгоритмическая часть; б) геометрическая часть На чертеже (рис. 7.5, б) конус вращения задан проекциями геометрической части его определителя: l(l1l2) В указанных примерах определитель поверхности выявляется путем анализа способов ее образования.
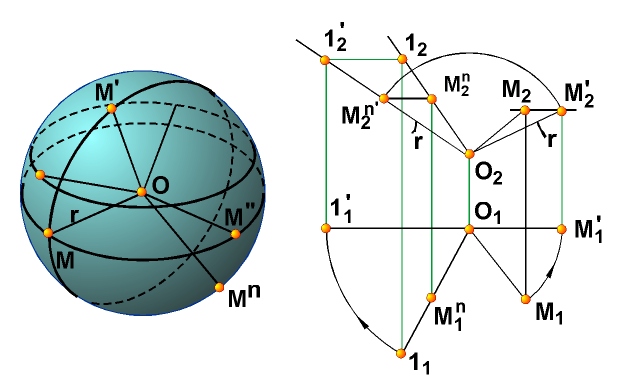
На рис. 7.6, б (справа) сфера задана проекциями точек О(O1O2) и М(М1М2), которые составляют геометрическую часть ее определителя, и показано построение произвольной точки Мn(Мn1 Мn2)сферы. При чтении чертежа немаловажную роль играет его наглядность. Задание поверхности проекциями геометрической части ее определителя не обеспечивает наглядности изображений. Поэтому для придания чертежу поверхности большей наглядности и выразительности прибегают к построению очерков ее проекций или проекций достаточно плотного каркаса ее образующих (в случаях, когда проекции поверхности не имеют определенного очерка) на основании алгоритмической части ее определителя. При проецировании поверхности на какую-либо плоскость проекций часть проецирующих лучей касается ее, образуя проецирующую поверхность. Точки касания при этом образуют линию видимого контура поверхности относительно этой плоскости проекций (рис. 7.7). Очерк проекции поверхности является проекцией соответствующей линии видимого контура.
Рис. 7.7. Образование проекций сферы
Линия видимого контура поверхности разделяет ее на две части − видимую, обращенную к наблюдателю, и невидимую. Никакая точка поверхности не может спроецироваться за пределы очерка.
Кривые поверхности разделяются на линейчатые и нелинейчатые, закономерные и незакономерные. Поверхность называется линейчатой, если она может быть образована перемещением прямой линии, в противном случае − нелинейчатой. Если поверхность может быть задана каким-либо уравнением, она называется закономерной, в противном случае − незакономерной, или графической (задается только чертежом). Закономерные поверхности, в зависимости от вида уравнения, разделяются на алгебраические и трансцендентные. Алгебраическое уравнение n-й степени (в декартовых координатах) задает алгебраическую поверхность n-го порядка (трансцендентные поверхности порядка не имеют). Алгебраическая поверхность n-го порядка пересекается плоскостью по кривой n-го порядка, а с прямой линией − в n точках. Плоскость, имеющую уравнение первой степени (с произвольной плоскостью пересекается по прямой линии, а с прямой − в одной точке), можно рассматривать как поверхность первого порядка. Примерами кривых поверхностей второго порядка могут служить поверхности, образованные вращением кривых второго порядка вокруг одной из своих осей. Поверхности второго порядка пересекаются с произвольной плоскостью по кривым второго порядка, а с прямой − в двух точках. Примером поверхности четвертого порядка может служить тор (см. поверхности вращения). Определитель может быть положен в основу классификации поверхностей. К одному и тому же классу относятся поверхности, имеющие одинаковую структуру определителя. Наибольшее применение в технике получили кинематические кривые поверхности с образующими постоянной формы:
а) развертывающиеся; Поверхности вращения.
ЛИНЕЙЧАТЫЕ ПОВЕРХНОСТИ.
1) развертывающиеся поверхности;
|
||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-21; просмотров: 347; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.226.222.106 (0.007 с.) |


 на рис. 7.3, а). Точки А, В и С составляют геометрическую часть определителя плоскости.
на рис. 7.3, а). Точки А, В и С составляют геометрическую часть определителя плоскости. Вторая часть определителя, т. е. алгоритм построения в плоскости
Вторая часть определителя, т. е. алгоритм построения в плоскости  виями принадлежности прямой и точки плоскости. На чертеже (рис. 7.3, б) плоскость
виями принадлежности прямой и точки плоскости. На чертеже (рис. 7.3, б) плоскость  i вокруг оси i (рис. 7.4, а).
i вокруг оси i (рис. 7.4, а). i)[A].
i)[A].
 i(i1i2}
i(i1i2}