Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Гусеничний трелювальний трактор з гідроманіпулятором тб-1мСодержание книги
Поиск на нашем сайте План лекції: 1. Технологічне обладнання тракторів, оснащених маніпуляторами. 2. Будова машини. 3. Технічна характеристика. 4. Гідроманіпулятор трактора ТБ-1. 5. Затискний коник трактора ТБ-1. До складу технологічного обладнання тракторів ТБ-1 (ТБ-1М) і ЛП-18А, оснащених маніпуляторами, входить власне маніпулятор, коник (канатний затискувач) і штовхач. Максимальний виліт маніпулятор має на висоті 2,5...3 м; виліт маніпулятора на рівні опорної поверхні гусениць становить 4,2...4,6 м. Технологічні розрахунки рекомендують вести по вильоту на рівні 1,2... 1,5 м від поверхні землі. При цьому виліт маніпулятора становитиме 5 м. Робоча зона маніпуляторного трактора зумовлена вильотом маніпулятора і кутом його повороту відносно вертикальної осі. Кут повороту маніпулятора трактора ТБ-1 дорівнює 280°. Трактор може взяти дерево, відземок якого знаходиться в будь-якій точці робочої зони. Важлива умова надійного і продуктивного збирання дерев маніпулятором - виконання прийомів у оглядовій зоні, тобто на тій площі, яку тракторист бачить із свого робочого місця. Затискний коник трактора ТБ-1 може вільно повертатися навкруги вертикальної осі, а також нахилятися вперед і назад на 42°. Все технологічне обладнання трактора приводиться в рух гідравлічною системою. Трактор ЛП-18А обладнаний гідроманіпулятором і канатним затискувачем, за допомогою якого здійснюється зв'язування і утримування дерев (стовбурів) на щиті. Канатний затискувач, на відміну від коника трактора ТБ-1, не повертається навкруги вертикальної осі. Маневрування трактора з пачкою здійснюється за рахунок гнучкості канатного закріплення пачки. Для захисту заднього моста і плавного розвантаження пачки на тракторі встановлено щит. При формуванні пачки трактор потрібно встановити так, щоб дерева, які підлягають збиранню, знаходилися зліва від нього, тобто від робочого місця тракториста в межах зони оглядності. При встановленні трактора необхідно враховувати крупномірність дерев, щоб крупні дерева брати на мінімальних виставах маніпулятора. Маневрування трактора для під'їжджання до дерев невеликого і середнього діаметрів не обов'язкове. В цих випадках доцільніше рухатися в прямому напрямку і збирати дерева за рахунок вильоту маніпулятора. При роботі в комплекті із звалювальною машиною трактор бере з однієї стоянки одне-два, інколи і три дерева. Трактор, за змогою, встановлюють паралельно до осі дерева. Відхилення може бути в межах ±20°. Після під'їзду до дерев і встановлення трактора (ТБ-1, ЛП-18А) у вибраній позиції тракторист разом із сидінням повертається із транспортного положення в робоче. При цьому коник трактора ТБ-1 (ТБ-1М) відкидається до заду для укладання дерев водночас і на ножову підпору, і на валець. Канатний затискувач трактора ЛП-18А, навпаки, відкидається вперед і канатна петля розтягується. Наведення маніпулятора на дерево полягає в коректуванні виставу маніпулятора і кута його повертання. Можливі два способи укладання відземка дерева в коник (чи канатний затискувач) - підтягуванням і перекиданням. Укладання шляхом перекидання відземків дерева через важіль коника виконують із меншою кількістю прийомів і зусиль. Проте таке укладання вимагає точного вибору позиції трактора біля дерева, щоб відземок до моменту укладання в коник виступав на потрібну відстань і не потребував поздовжнього пересування. Укладання підтягуванням дозволяє збирати дерева з великої площі і вирівнювати відземки дерев шляхом поздовжнього їх переміщення. Для збільшення продуктивності трактора потрібно брати з однієї зупинки найбільшу кількість дерев, за змогою, всі дерева, які знаходяться в межах робочої зони маніпулятора. При збиранні розкиданих дерев можна застосувати такі прийоми: захоплювати невелике дерево і переміщатись, утримуючи його в захоплювачі, до наступного дерева, після затискання якого відкрити коник і вкласти в нього обидва дерева. При збиранні пачки маніпулятором потрібно брати дерева, які лежать вільно. Дерева з примерзлою кроною, заклинені між пнями чи затиснуті іншими деревами, витягують ходом трактора. Відземки таких дерев обережно підіймають маніпулятором, укладають в коник і затискають у ньому; потім трактор плавно рухається вперед. Дерева, які лежать під кутом більше 20° до трактора, рекомендується спочатку взяти в захоплювач і витягнути ходом трактора для вирівнювання з іншими деревами в пачці, і тільки тоді покласти в коник. Трактори з гідроманіпуляторами можна застосовувати також для трелювання стовбурів за верхівки після звалювання дерев бензопилками. При цьому на деревах необхідно зрізати гілки, а також верхівку на діаметрі 8...12 см залежно від розміру дерева. Звалювання дерев проводять з підвищеною точністю - верхівками на смугу шириною 4...5 м, тобто в межах виставу маніпулятора (при наступному проході трактора). Трактор з гідроманіпулятором ТБ-1М призначений для безчокерного трелювання дерев і хлистів при суцільних і вибіркових рубках у північно-західній зоні країни, а також для виконання за допомогою штовхача допоміжних робіт: вирівнювання відземків і підбирання дерев перед навантаженням, підготовки трелювальних волоков і вантажних майданчиків. Служить базою для створення лісових машин маніпуляторного типу. Трактор ТБ-1М розрахований на експлуатацію при температурі навколишнього повітря від + 40 °С до - 40 °С. Конструкція машини. Трактор ТБ-1М (мал. 15) створений на базі трелювального трактора ТДТ-55А, оснащений спеціальним технологічним устаткуванням: гідроманіпулятором з щелепним захопленням, гідрокерованим затискним коником і переднім підйомно-навісним пристроєм з штовхачем. Порожнина рами закрита передньою і задньою огорожами. Є гідравлічна система управління технологічним устаткуванням. На тракторі встановлений дизель СМД-18БН, який відрізняється від дизеля СМД-14БН, використовуваного на тракторах ТДТ-55А і ТБ-1, установкою турбокомпресора на випускному колекторі для примусового надуву повітря у циліндри дизеля, що дозволяє підвищити його потужність 70 кВт. На тракторі встановлено також новий уніфікований блок радіаторів. Вихлопна система обладнана глушником шуму. Змінено розташування пускового підігрівача і покращена система під'єднування його водяної сорочки на дизелі. Кабіна оснащена каркасом безпеки, кабіни, що забирається всередину, підніжкою, підресореним поворотним сидінням, захисними гратами і аварійним виходам. На рамі трактора кабіна змонтована за допомогою віброізоляторів. З'єднання кабіни і капота виконане шарнірно-еластичним. Внутрішні поверхні кабіни мають теплошумоізоляцією і декоративну обшивку. Для нормалізації мікроклімату кабіна обладнана регульованими системами вентиляції і опалювання. Переднє і заднє вікна кабіни виконані такими, що відкриваються. Вони мають захисні грати, які легко скидаються через відкрите вікно при використанні його як аварійний вихід. У кабіні встановлено підресорене поворотне на 180° сидіння, що має регулювання залежно від маси і зростання водія. У кабіні розташовані органи управління і контрольні прилади, що забезпечують управління трактором і технологічним устаткуванням, що дозволяє механізувати збір пачки дерев, вантаження їх на трактор, транспортування пачки і її розвантаження. Гідроманіпулятор служить для укладання відземків або вершин дерев у коники трактора. Він складається з підставки, підрізання, колонки з механізмом повороту двохрейкового типу, стріли з важелем, захоплення і фіксатора захоплення. Підставою і підрізання гідроманіпулятора закріплені на рамі трактора за допомогою шарнірних опор. Захоплення може кріпитись фіксатором на важелі в процесі наведення його на дерево, за рахунок чого збільшується найбільший виліт гідроманіпулятора. Збільшений кут повороту гідроманіпулятора дозволяє при вантажному ході трактору розвертати стрілу вперед і укладати закрите захоплення штовхачем, що покращує розподіл питомого тиску під опорними катками і підвищує прохідність трактора. Колонка з механізмом повороту складається з трубчастого вала з привідною головкою, литого корпусу і двох зубчатих рейок з поршнями, розміщених у циліндрах, закріплених у корпусі шпильками. Стріла і важіль зварної конструкції коробчатого типу із зварними і литими кронштейнами. Нижні кронштейни важелів роз'ємні, з кришками і змінними сталевими втулками призначені для установки захоплення. Поворот важеля щодо стріли здійснюється гідроциліндром. Захоплення щелепного типу із вбудованим гідроциліндром шарнірно встановлене у нижніх кронштейнах важелів за допомогою траверси. Фіксатор захоплення складається з корпуса, важелів з роликами, пружин і амортизаторів. У процесі укладання дерева у конику корпус захоплення розсовує ролики, які потім змикаються і під дією зусилля пружин утримують захоплення у притиснутому до важеля положенні. При підйомі захопленого дерева під дією ваги захоплення долає зусилля пружини фіксатора і займає вертикальне положення. Затискний коник за конструкцією аналогічний коникові трелювального трактора ТБ - 1. Об'єднана гідравлічна система трактора ТБ-1М забезпечує управління технологічним устаткуванням (гідроманіпулятором, затискним коником і штовхачем) і управління трактором (гідропідсилювача механізмів повороту і зчеплення). Гідросистема управління технологічним устаткуванням включає три шестерінчасті об'ємні насоси, три трьохзолотникових гідророзподілювача, гідроциліндри затискних важелів коника, повороту коника, гідроприводу стріли, важеля, захоплення, рейкового механізму повороту і штовхача, гідропанель і фіксатор гідроприводу затискного коника, запобіжні гідроклапани гідроприводу стріли і важеля, блок гідроклапанів гідропривода механізму повороту і гідробак із зливними фільтрами. Швидкість руху і тягові зусилля на крюку (розраховані, при русі на твердому грунті без урахування буксування) наведені в табл. 1.3.
Технічна характеристика трактора ТБ-1М
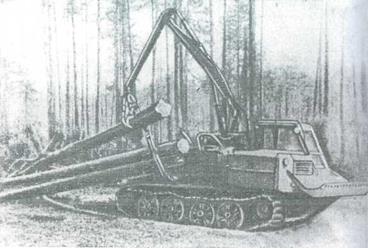
Трактори ТБ-1, розроблені Онєжським тракторним заводом і Ленінградською лісотехнічною академією (ЛТА), обладнані маніпуляторами. Трактор ТБ-1 (мал. 16) має наступне навісне устаткування: лебідку, бульдозер, коник із затискним механізмом, маніпулятор і гідросистему. За допомогою маніпулятора трактор захоплює дерева і вантажить їх на коник, що має затискний пристрій. Трактор трелює дерева без чокеровки. Його обслуговує одна людина. Продуктивність трактора ТБ-1 за робочу зміну досягає 80 м3. Він може працювати на лісосіках з суцільними і вибірковими рубками. Цей трактор не пов'язаний з валянням дерев і дозволяє захоплювати, підтягати і укладати їх на машину з відстані до 4 м. Крім того, трактор ТБ-1 виконує підготовчі і допоміжні роботи на лісосіці (розчищення і планування вантажного майданчика, підгортання пачки дерев, трелювання лісу і інші роботи), здійснює вантаження лісу. З важкодоступних ділянок він трелює дерева за допомогою лебідки і чокерів з подальшим вантаженням лісу на коника машини маніпулятором, який має гідравлічний привід. Недоліком трактора ТБ-1 є велика маса (10,5 т) і підвищений питомий тиск па грунт (0,75 кг/см2). Гідравлічна система трактора ТБ-1. Гідравлічна система трактора складається з двох автономних систем: гідравлічної системи управління технологічним устаткуванням (гідроманіпулятора, затискного коника, штовхача) і гідравлічної системи управління трактором (механізмами повороту і муфтою зчеплення). Гідравлічна система трактора забезпечує: виконання за допомогою маніпулятора і затискного коника технологічних операцій набору звалених дерев за відземок або вершину, укладання і закріплення їх в затискному конику; зниження зусиль за допомогою системи гідропідсилювачів; оберігання гідроагрегатів, механізмів технологічного устаткування і управління транспортом від перевантажень, що виникають в процесі експлуатації, і обмеження максимальної величини робочого тиску.
Мал. 16. Загальний вигляд трактора ТБ-1 з маніпулятором.
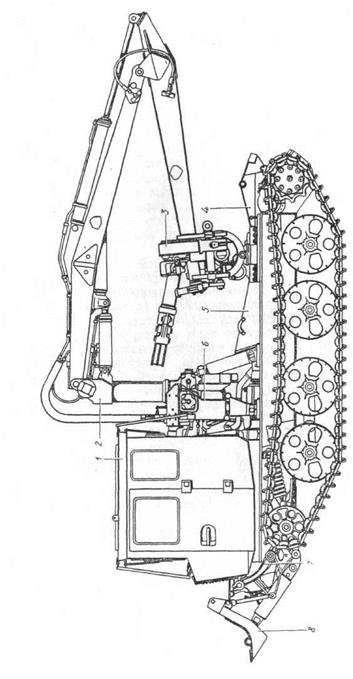
Гідравлічна система трактора ТБ-1 у порівнянні з базовим трактором ТДТ-55 має розвиненішу гідросистему управління технологічним устаткуванням, яка складається з двох гідросистем, що мають самостійне джерело живлення (гідронасос), механізми управління і певну групу циліндрів. Така двохнасосна система дозволяє сумістити операції, тобто управляти одночасно двома операціями. Поєднання операції забезпечує скорочення тривалості робочого циклу і збільшення продуктивності трактора. Пристрій і робота гідроманіпулятора трактора ТБ-1. Гідроманіпулятор (мал. 17) трактора призначений за допомогою захоплення 13 набирати пачку звалених дерев, укладаючи їх в коника за відземок або за вершину. Гідроманіпулятор може піднімати і вкладати в коника за підземок дерева об'ємом до 2,5 м3 з відстані до 5 м від осі повороту стріли гідроманіпулятора. Гідроманіпулятор виготовлений у вигляді поворотної стріли шарнірного важеля 12, з кліщовим захопленням 13. Гідроманіпулятор має наступні основні вузли: опорну ферму 1, поворотну колонку 6 з гідроциліндром 10, з механізмом повороту стріли 12, важелем 14, кліщове захоплення 13 і управління розподільниками і гідросистемою. Механізм повороту складається з тяги 9 і шарнірно пов'язаного з нею литого важеля 8, який одним кінцем приєднаний до циліндра повороту 10, а іншим закріплений шарнірно з'єднанням з поворотною колонкою 6. Стріла 12 проводить керування двома гідроциліндрами 11. Щелепне захоплення (мал. 18) трактора ТБ-1 здійснює керування гідроциліндром 1, траверси якого шарнірно приєднані до кронштейнів важеля. У середині корпусу гідроциліндра 1 є повзун 3, приєднаний через палець до штока 4 гідроциліндри, а в нижній частині шарнірно сполучений з двома рициною 5 захоплення. На корпусі гідроциліндра 1 вільно посаджена поворотна обойма 6, шарнірно зв'язана тягою 7 з рициною 5. На вільному кінці повзуна 3 закріплена втулка 8, що має з одного боку гвинтові скоси. Інша втулка 9 з гвинтовими скосами зафіксована за допомогою двох виступів в нижній частині корпусу гідроциліндра. Скоси втулок 8 і 9, взаємодіючи один з одним при розкритті захоплення, встановлює рицина у поперечній площині щодо стріли. Тим самим полегшується взяття захопленням при навантаженні дерева. Управління гідророзподілювачами трактора проводиться важелями, змонтованими на валику на задній стінці кабіни і зв'язані через тягу з важелями розподільників.
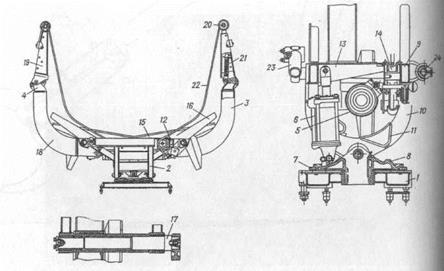
Мал. 17. Схема пристрою гідроманіпулятора трактора ТБ-1: 1— опорна ферма; 2 — передня опора; 3 — подовжня балка; 4 — труба; 5 — задні опори; 6 — поворотна колонка; 7 — головка колонки; 8 — важіль; 9 — тяга; 10 — циліндр повороту стріли; 11 — гідроциліндр стріли; 12 — стріла; 13 — кліщове захоплення; 14 — важіль; 15 — гідроциліндр приводу щелепного захоплення; 16 — гідроциліндр важеля Затискний коник типу (мал. 19) важеля призначений для закріплення на тракторі канатним обв'язуванням пачки дерев при їх трелюванні за відземок або вершину. Коник має наступні головні вузли: опорну плиту 1, підстава 2, затискні важелі 3 і 4 і гідроциліндри 5 і 6. Опорна плита закріплена гвинтами на лонжеронах рами трактора. У центральному розточуванні плити шарнірно встановлені за допомогою кільця 7 блок 8 шарніра. У горизонтальних розточуваннях блоку 8 шарнірів встановлено па пальцях зварна підставка 2, що складається з двох поздовжніх балок з кронштейнами і зв'язків 10, підкріплених розкосами. У верхній частині підстави встановлено два блоки 14.
Мал. 18. Щелепне захоплення маніпулятора трактора ТБ-1: 1 — гідроциліндр; 2—траверса; 3 — повзун; 4 — шток; 5—клещевина; 6 — поворотна обойма; 7 — тяга; 8,9 — втулки
У кронштейнах підстави закріплені на осях 17 затискних важелів 3 і 4, керовані гідроциліндром 5 затиску. Для щільного обв'язування пакетів різного об'єму по всьому периметру затискні важелі виконані з двох шарнірно сполучених ланок — підстави 18 і вершини 19. Висота зовнішнього упору за допомогою прокладок при збірці коника регулюється для створення зазору (10—20 мм) між роликом 20 вершин і упором при повністю закритих важелях. Обв'язувальні канати 22 пропущені через блоки 14 і закріплені кінцями за допомогою клинових з'єднань до кінця затискних важелів. Блокувальна тяга 23, що зв'язує важелі між собою, забезпечує синхронну роботу зажимних важелів і сприяє формуванню пачки в середній час підстави коника. У кронштейнах підстави коника установлений розвантажувальний ролик 24, який полегшує схід дерев з коника при розвантаженні.
Мал. 19. Затискний коник трактора ТБ-1: 1—опорна плита; 2— підстави; 3 і 4— затискні важелі; 5 і 6 — гідроциліндри; 7—кільце; 8 — блок шарніра; 9 — поздовжня балка; 10 — зв'язки; 11 — упор; 12 — балка поперечна; 13 — перемичка; 14 — блоки; 15 — ножі; 16 — обмежувачі; 17 — осі; 18 – підставка затискних важелів; 19— вершини; 20 — ролик; 21 — пружина; 22 — канат; 23 – блокувальна тяга; 24 — розвантажувальний ролик
Робота трактора ТБ-1 на лісосіці відбувається наступним чином. Рухаючись уздовж смуги дерев, що повалили бензопилою, він збирає пачки, поштучно закладаючи дерева маніпулятором в затискний коник. Всі операції виконуються одним трактористом. Продуктивність одного лісозаготівельника при роботі на тракторі ТБ-1 зростає більш ніж в 2 рази. Лекція 4
|
|||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 859; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.216 (0.011 с.) |