
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение упругого модуля сдвига стальной проволоки методом крутильных колебанийСтр 1 из 11Следующая ⇒
ОПРЕДЕЛЕНИЕ УПРУГОГО МОДУЛЯ СДВИГА СТАЛЬНОЙ ПРОВОЛОКИ МЕТОДОМ КРУТИЛЬНЫХ КОЛЕБАНИЙ Лабораторная работа № 4.8
Цель работы: исследовать деформацию кручения цилиндрического тела и установить связь между крутящим моментом и углом закручивания. Определить модуль сдвига образца. Оборудование: крутильный маятник, измеритель периода крутильных колебаний системы, набор металлических дисков с известными моментами инерции, стальная проволока, электромагнит. Теоретическое введение Кручением называется деформация образца, один конец которого закреплен, а на другой действует пара сил, плоскость которой перпендикулярна оси образца. Кручение состоит в относительном повороте параллельных друг другу сечений, проведенных перпендикулярно к оси образца. Деформация кручения является неоднородной. Она увеличивается при удалении от оси поворотов элементов образца. Закон Гука для деформации кручения записывается в виде где ƒ - модуль кручения, Модуль кручения показывает, какой момент сил нужно приложить, чтобы закрутить проволоку на угол в 1 рад. В отличие от модулей Юнга и сдвига эта величина зависит не только от материала, но и от геометрических размеров проволоки. Деформацию кручения можно свести к деформации сдвига. Получим выражение для модуля кручения ¦.
C
φ L
Стержень (рис.1) можно представить состоящим из множества цилиндрических оболочек (трубок), каждая из которых характеризуется радиусом r, длиной L и толщиной dr. Площадь основания трубки
dS = 2 p r dr, (2) а момент касательных упругих сил, действующих в этом основании, где Каждый продольный элемент цилиндрической трубки поворачивается на угол По закону Гука для сдвига получим Итак, момент сил, действующих на цилиндрическую трубку, равен Полный же момент сил, действующих на проволоку (стержень) радиуса R, найдется интегрированием выражения (6): Имея соотношения (1) и (7), получим выражение для модуля кручения образца Экспериментально модуль кручения можно измерить, наблюдая крутильные колебания маятника. . Описание установки и методика измерений
Рис.2
Установка имеет основание с регулируемыми ножками, на котором расположен электронный измеритель периода крутильных колебаний и закреплена вертикальная колонка. На колонке установлены три кронштейна, причем нижний и средний, в случае необходимости, можно перемещать вдоль колонки. На среднем кронштейне имеется площадка в виде полукольца, на которой располагаются электромагнит и фотоэлектронный датчик. При необходимости их положение можно изменять. Колеблющаяся система состоит из двух одинаковых упругих элементов (проволок) и инерционной рамки, позволяющей закреплять дополнительные инерционные грузы (диски) с известными моментами инерции относительно продольной оси (рис.2).
Динамическое уравнение свободных колебаний крутильного маятника имеет вид: где I – момент инерции колеблющейся системы, С учетом (7) уравнение (9) запишем в таком виде: где Заметим, что как уравнение (10), так и соотношение (11) справедливы только для упругих деформаций кручения проволочной подвески маятника. Решая уравнение (10), получим: Здесь φ – угол поворота крутильного маятника к моменту t; φ m – заданная угловая амплитуда колебаний. Уравнение (12) определяет свободные, практически гармонические, колебания вертикального крутильного маятника с периодом На самом же деле, колебания будут медленно затухающими, так как полностью силы сопротивления исключить невозможно. Из (13) получим формулу для модуля сдвига где d – диаметр проволочной подвески маятника. Собственный момент инерции маятника неизвестен. Чтобы исключить этот параметр, необходимо иметь два дополнительных инерционных тела с известными моментами инерции, которыми нагружается маятник. Пусть I 0 – неизвестный собственный момент инерции маятника, а I 1 и I 2 – моменты инерции дополнительных тел. В этом случае мы получим систему двух уравнений: Решая систему (15), получим: Здесь Порядок выполнения работы
1. Убедиться в том, что крутильный маятник в исходном состоянии имеет вертикальное положение. В противном случае произвести выравнивание прибора с помощью регулируемых ножек основания. 2. Установить первый инерционный диск в рамку маятника и измерить период колебаний, повторяя данную процедуру 3 раза. По данным этих измерений найти среднее значение периода Т1. 3. Установить второй инерционный диск в рамку маятника, не снимая первый. Произвести 3 измерения периода и найти его среднее значение Т2. 4. По формуле (16) найти модуль сдвига стальной проволоки. 5. Результаты измерений и расчётов записать в табл.1.
Таблица 1.
Контрольные вопросы 1. Какой вид имеет закон Гука для основных видов деформации?
2. В чём состоит физический смысл упругих модулей? 3. Что такое нормальное и тангенциальное напряжения? 4. От чего зависит потенциальная энергия упруго деформированного тела? 5. Какие деформации называются упругими, пластическими? 6. От чего зависит модуль упругости образца?
Лабораторная работа № 4.4 Цель работы: изучение законов динамики вращательного движения и экспериментальное определение момента инерции тел вращения с помощью трифилярного подвеса. П ринадлежности: трифилярный подвес, секундомер, штангенциркуль, образцы для измерений, линейка.
Описание установки и методика измерений
В данной работе для определения момента инерции пользуются методом трифилярного подвеса. Трифилярный подвес представляет собой круглую платформу, подвешенную на трёх симметрично расположенных нитях (рис.1). Наверху эти нити также прикреплены к диску меньшего, чем у платформы, диаметра. Платформа может совершать крутильные колебания вокруг вертикальной оси. Центр тяжести при этом перемещается по оси вращения. Период колебаний определяется величиной момента инерции платформы. При нагружении платформы период колебаний изменяется, и этим пользуются в данной работе. Если платформа массой m, вращаясь, поднялась на высоту h, то приращение потенциальной энергии будет равно
Вращаясь в другом направлении, платформа придёт в положение равновесия с кинетической энергией, равной Пренебрегая работой сил трения, на основании закона сохранения имеем Считая, что платформа совершает гармонические колебания, можно записать зависимость углового смещения платформы от времени в виде
где j - угловое смещение платформы; j 0 - амплитуда смещения; Т - период колебаний; t - текущее время.
Угловая скорость вращения платформы выразится так
В момент прохождения через положение равновесия (t = 0; T /2; T; 3 T /2 и т.д.) На основании выражений (1) и (2) имеем Высота подъёма платформы определяется формулой
          . .
 Вследствие малости угла Вследствие малости угла  0 синус можно заменить аргументом. Тогда получаем 0 синус можно заменить аргументом. Тогда получаем
       
 . .
 (5) (5)
  
 , ,
отсюда По формуле (6) могут быть определены момент инерции самой платформы и платформы с телом, т.к. все величины в правой части формулы могут быть непосредственно измерены. Вращательный импульс, необходимый для начала крутильных колебаний, сообщается платформе путём поворота верхнего диска вокруг его оси при помощи натяжения шнура, приводящего в движение рычажок, связанный с диском. Этим и достигается почти полное устранение других некрутильных колебаний, наличие которых вносит погрешность в определение момента инерции. Порядок выполнения работы 1. Измерить внутренний и внешний диаметры диска. Значения массы диска, его внешний и внутренний радиусы, а также параметры трифилярного подвеса занести в табл. 1.
Таблица 1.
2. Привести пустую платформу во вращательное движение, измерить время 10 полных колебаний, рассчитать период колебаний. Опыт проделать 3 раза и полученные результаты занести в табл.2. 3. Аналогичные измерения и расчёты сделать для нагруженной платформы.
Таблица 2.
. 4. Вычислить моменты инерции ненагруженной I 0 и нагруженной I 1 платформы по формуле (6). Определить момент инерции измеряемого тела по формуле I = I 1 - I 0. Записать окончательный результат.
5. Рассчитать теоретическое значение момента инерции: где R 1 - внешний радиус тела; R 2 - внутренний радиус тела. 6. Полученные в п. 5 данные сравнить с результатами опыта. Оценить в процентах отклонение значения момента инерции, полученное в опыте, от теоретически рассчитанной величины.
Контрольные вопросы 1. В чём состоит физический смысл момента инерции твёрдого тела? 2. Как рассчитать момент инерции диска относительно оси, проходящей через центр инерции? 3. Как формулируется основной закон динамики вращательного движения? 4. От чего зависит кинетическая энергия вращающегося тела? 5. Как записать закон сохранения механической энергии в условиях данной работы? 6. Как формулируется теорема Штейнера? 7. По какой формуле определяется теоретическое значение момента инерции диска с соосным круглым отверстием?
ОПРЕДЕЛЕНИЕ СКОРОСТИ ПОЛЕТА ПУЛИ Таблица 1
2. Отрегулировать длину нитей так, чтобы направление оси цилиндра было горизонтально и перпендикулярно линии, соединяющей обе точки подвеса. Надо следить за тем, чтобы нити подвеса не перекручивались. Установить шкалу параллельно оси цилиндра и подготовить «пушку» к выстрелу. Убедившись в том, что пуля, вылетевшая из «пушки», может попасть в точку на оси цилиндра, произвести пять выстрелов каждой пулей и полученные результаты записать в табл.2. Таблица 2
3. Вычислять по формуле (10) среднее значение скорости каждой пули по среднему значению смещения стрелки из положения равновесия. 4. Рассчитать погрешности и записать окончательный результат. Контрольные вопросы 1. Что представляет собой баллистический маятник? Для чего он предназначен? 2. Что такое момент силы, момент импульса и момент инерции твёрдого тела? 3. Как формулируются законы сохранения импульса и момента импульса механической системы? 4. Как записать закон сохранения момента импульса системы в условиях данной работы? 5. Как формулируется закон сохранения механической энергии? В каких случаях он применяется?
ИССЛЕДОВАНИЕ ОСНОВНОГО УРАВНЕНИЯ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ И ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ КРЕСТООБРАЗНОГО МАЯТНИКА Лабораторная работа № 4.2б.
Цель работы: экспериментальная проверка основного закона динамики вращательного движения и определение момента инерции крестообразного маятника. Принадлежности: крестообразный маятник, секундомер, набор грузов, штангенциркуль. Описание установки и методика измерений Крестообразный маятник представляет собой систему, состоящую из двух шкивов 1 и 2 различных диаметров, закрепленных на одной оси, и четырех стержней 3 (рис.1). Стержни расположены в плоскости, перпендикулярной оси вращения под углом 900 друг к другу. Стержни симметрично нагружаются грузами 4 массой m 0. На один из шкивов наматывается нить, свободный конец которой проходит через блок 5 и нагружается грузом 6 массой m. Груз проходит между окошками фотоэлектрических датчиков 7 и 8, электрические импульсы от которых при прерывании светового потока поступают на миллисекундомер 9 и автоматически включают и выключают его. Вся система смонтирована на колонке 10, установленно
Рис.1
Основание снабжено регулировочными ножками, обеспечивающими вертикальную установку колонки. На нижней втулке 12 на подставке закреплен тормозной электромагнит, который после подключения к нему напряжения удерживает с помощью фрикционной муфты систему крестовина - грузы в состоянии покоя. К нижнему кронштейну 13 прикреплена подставка с резиновыми амортизаторами, ограничивающими движение грузов. Первоначальное положение груза можно изменять перемещением подвижного кронштейна 14. Для отсчета высоты на колонке нанесена миллиметровая шкала. На лицевой панели миллисекундомера размещены клавиши: СЕТЬ - нажатием этой клавиши включается питающее напряжение и производится автоматическое обнуление прибора; СБРОС - установка нуля (нажатие этой клавиши вызывает сброс показаний миллисекундомера); ПУСК - управление электромагнитом (нажатием этой клавиши освобождается электромагнит и генерируется импульс на начало измерения). В данной работе исследуется основное уравнение динамики вращательного движения, которое устанавливает линейную зависимость между приложенным к вращающемуся телу моментом сил где I - искомый момент инерции. Угловое ускорение крестообразного маятника можно найти через ускорение падающего груза m (рис.2): где r, d - соответственно радиус и диаметр шкива. Линейное ускорение а можно определить, измерив путь H, пройденный грузом за какой-то отрезок времени t: Окончательное выражение для углового ускорения примет вид Активной силой, обуславливающей ускоренное вращение маятника, является сила натяжения нити F н. Если пренебречь силами трения и инерционностью вращательного блока 5, то можно принять, что где m и а – масса и ускорение ведущего груза. Тогда вращательный момент, действующий на крестообразный маятник, можно положить равным
или в окончательном виде
График позволяет определить величину момента инерции маховика по формуле Экстраполируя полученную прямую до ε = 0, можно также определить момент сил трения Мтр. Момент инерции ненагруженного маятника вычислить по формуле где R - расстояние центра тяжести груза m 0 до оси вращения.
Порядок выполнения работы 1. Убедиться в вертикальной установке прибора. 2. Измерить штангенциркулем диаметры большего шкива D и меньшего шкива d. 3. Установить груз с минимальным значением массы. 4. Подключить сетевой кабель в розетку и нажать клавишу СЕТЬ. 5. Нажать клавишу ПУСК и намотать нить на малый шкив, вращая маятник против часовой стрелки. При этом рукой держаться только за ось, а не за стержень. Груз поднимать до такой высоты, чтобы нижняя грань груза была на одном уровне с риской на верхнем кронштейне (тело груза не должно перекрывать окошко фотодатчика). 6. Отжать клавишу ПУСК и убедиться, что электромагнит удерживает груз в фиксированном положении, а на секундомере – нули. 7. Нажать клавишу ПУСК. Электромагнит отключится, и груз станет опускаться вниз, вращая маятник. При достижении грузом нижнего фотодатчика происходит автоматическая остановка секундомера и включается электромагнит. 8. После записи времени опускания в табл.5.1 немедленно нажать клавишу СБРОС. При этом отключается электромагнит и обнуляется секундомер. Установка готова к повторению опыта. 9. Измерение времени для каждого груза проводят три раза и вычисляют среднее значение. Опыт проделать не менее чем с пятью грузами. Данные занести в табл. 1. 10. По формулам (4) и (6 ) находят М и e для каждого груза. Строят график Таблица 1
11. Cогласно формуле (7) определить среднее значение момента инерции I. 12. Определить момент сил трения Мтр путём экстраполяции графика 13. Все опыты повторить с большим шкивом. Заполнить аналогичную таблицу для второго шкива. 14. Построить второй график 15. Вычислить среднее арифметическое значение момента инерции нагруженного маятника:
16. По формуле (8) найти момент инерции ненагруженного маятника I 0:
Контрольные вопросы 1. Что представляет собой крестообразный маятник? Для чего он предназначен? 2. Что такое момент инерции тела? Каков его физический смысл? 3. Как формулируется основное уравнение динамики вращательного движения твёрдого тела? 4. Как определяется момент силы относительно точки и оси вращения? 5. Как теоретически рассчитать момент инерции крестообразного маятника?
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ Лабораторная работа № 4.5
Цель работы: определить момент инерции металлических колец при помощи маятника Максвелла. Оборудование: маятник Максвелла, набор металлических колец с известными и неизвестными моментами инерции.
Описание установки и методики измерения Маятник Максвелла представляет собой ролик (маховичок), который закреплен на оси и бифилярным способом горизонтально подвешен на неподвижной балке. На ролик маятника могут накладываться сменные металлические кольца, позволяющие изменить момент инерции системы (рис.1)
Рис.1 Маятник Максвелла является основной частью лабораторной установки, содержащей электромагнит, фотодатчики и электронный измеритель времени. Если сначала поднять маятник до некоторой высоты, наматывая нити подвеса виток к витку на валик путем его поворота, а затем отпустить, то он достаточно длительное время будет совершать периодические движения вниз-вверх. Отсюда, собственно, и название системы «маятник». В момент достижения маятником нижнего положения происходит упругий удар, в результате которого скорость поступательного движения получает противоположное направление, практически не меняя своей величины. Направление же вращательного движения остается прежним. В результате этого нити подвеса будут навиваться на валик в противоположном направлении, и маятник будет подниматься вверх. Процесс перемещения маятника вниз-вверх будет многократным. Если пренебрегать силами сопротивления, то маятник Максвелла в целом можно рассматривать как консервативную систему, а его движение – соответствующее закону сохранения механической энергии. Пусть m – масса маятника, I – его момент инерции. Положение маятника в текущий момент времени будем определять координатой центра масс относительно его начального положения h = 0 в момент t = 0. На рис.2 указаны основные силы, действующие на тело маятника, и направления его движений. Считаем, что нити подвески маятника практически вертикальны. Заменяем действие двух нитей на тело их суммарной силой F. На основании законов динамики плоско-параллельного движения тела имеем два уравнения:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 760; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.221.129.19 (0.185 с.) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 , (1)
, (1)  - абсолютный угол кручения образца.
- абсолютный угол кручения образца. O
O , (3)
, (3) - напряжение сдвига в этом сечении.
- напряжение сдвига в этом сечении. . (4)
. (4) . (5)
. (5) . (6)
. (6)  . (7)
. (7) . (8)
. (8) 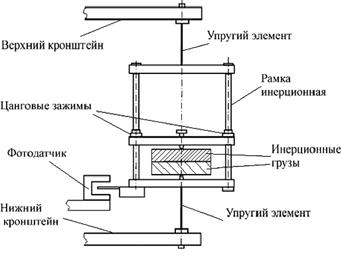
 , (9)
, (9) – угловое ускорение, Мупр – момент упругих касательных сил.
– угловое ускорение, Мупр – момент упругих касательных сил. , (10)
, (10) . (11)
. (11) . (12)
. (12) . (13)
. (13) , (14)
, (14) (15)
(15) , (16)
, (16) , где L 1 и L 2 – длины верхней и нижней проволочных подвесок маятника.
, где L 1 и L 2 – длины верхней и нижней проволочных подвесок маятника.
 , где I - момент инерции платформы; w m ах - угловая скорость платформы в момент прохождения ею положения равновесия.
, где I - момент инерции платформы; w m ах - угловая скорость платформы в момент прохождения ею положения равновесия. . (1)
. (1)
 .
. и угловая скорость будет максимальной:
и угловая скорость будет максимальной: . (2)
. (2) . (3) Если l - длина нитей подвеса, R - радиус платформы, r - радиус верхнего диска, то из рис.1 легко видеть, что
. (3) Если l - длина нитей подвеса, R - радиус платформы, r - радиус верхнего диска, то из рис.1 легко видеть, что
 . (4)
. (4)
 Подставим в (4) вместо h 1 и h 2 их значения, получим
Подставим в (4) вместо h 1 и h 2 их значения, получим




 Подставляя (5) в (3), получим
Подставляя (5) в (3), получим



 . (6)
. (6)  ,
,
















 й на основании.
й на основании. и полученным им угловым ускорением
и полученным им угловым ускорением  , т. е.
, т. е. , (1)
, (1) , (2)
, (2) . (3)
. (3) 
 . (4)
. (4) , (5)
, (5) ,
, . (6)
. (6) По данным проведенных опытов с привлечением формул (4) и (6) можно рассчитать величины M и соответствующие им значения e, а затем построить график зависимости
По данным проведенных опытов с привлечением формул (4) и (6) можно рассчитать величины M и соответствующие им значения e, а затем построить график зависимости  , который представлен на рис.3. Эта зависимость линейная.
, который представлен на рис.3. Эта зависимость линейная. . (7)
. (7) , (8)
, (8)  .
.  до его пересечения с осью М при e = 0.
до его пересечения с осью М при e = 0. и определить I 2.
и определить I 2.  .
.
 , (1)
, (1) . (2)
. (2)


