
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Зависимость координат точек местности от координат точек снимка
Исходя из рис.3.1 установим зависимость координат точки местности от координат этой же точки, измеренной на снимке. Исходной примем фотограмметрическую систему координат XYZ.
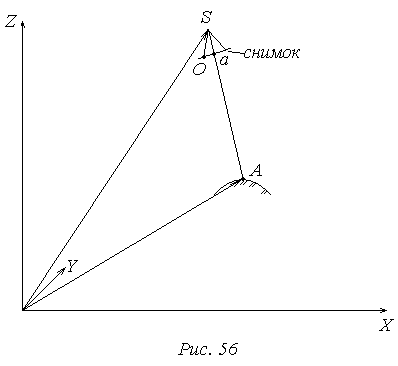
Рис. 3.1. Связь координат точек снимка и местности
Вектор Введем векторы RА и RS. А вектор RSA запишем дважды в следующем виде RSA= mr, где m – масштабный фактор и RSA= RА - RS; (3.1) Очевидно, что RА - RS= mr (3.2) Это есть уравнение коллинеарности векторов. Оно является фундаментальным для установления связей между координатами точек снимка и местности. Перепишем (3.2) в координатном виде:
Очевидно, что XA-XS=mx; YA-YS=my; ZA-ZS=mz; Тогда, XA=XS+mx; (3.4) YA= YS+ my; Неизвестный множитель m найдем так:
Тогда формулы (3.4) примут вид
Настоящие формулы являются основными для установления зависимости координат точек местности от координат точек снимка. Только выразим в них координаты x, y через измеренные на снимке и элементы внутреннего и внешнего ориентирования снимка. Координаты точек снимка x, y, z даны в фотограмметрической системе координат, начало которой перенесено в точку фотографирования S. А снимок находится под наклоном к данной системе координат на углы α, ω, æ.(рис.3.2)
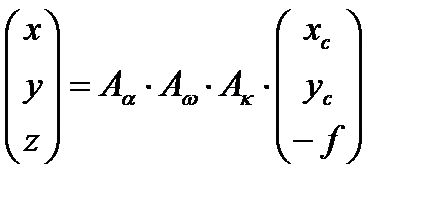
Рис.3.2.Первая система внешнего ориентирования снимка В системе координат снимка координаты точки определяются следующими значениями xc, y c, zc=- f. Задача заключается в том, чтобы от координат xc, y c, zc=- f перейти к координатам x, y, z используя углы наклона снимка α, ω, æ,, называемые еще углами Эйлера. Такой переход осуществляется по формуле
где
Отметим, что матрица
(3.11)
называется матрицей направляющих косинусов. Таким образом, вычисляя по формуле (3.6) координаты x, y, z и подставляя их в (3.5),(3.6) находят координаты точки местности в фотограмметрической системе координат.
Пример. Пусть xс=80,637мм, yс=2,517мм, α=3º, ω =0, κ=0. cosα=0,998630, sinα=0,0523360. Значения тригонометрических функций берутся в таких задачах с точностью до шестого знака после запятой и с соблюдением шести значащих чисел. Тогда
Aα=
По формулам (3.5),(3.6) окончательно получим
ХА=6426,16+(154,160-1654,17)85,7601/(-95,6428)=7771,176(м), УА=52346,11+(154,160-1654,17)2,517/(-95,6428)=52385,585(м) Задача 3.1. Вычислить координаты точки местности, измеренной на фотоснимке. Исходные данные приведены в таблице 3.1. Принять Х s=6426,16 м, Ys =52346,11 м, Zs=1654,17 м, ZА=154,16 м, f=100,000 мм.
Таблица 3.1. Исходные данные к задачам 3.1 и 3.2.
Трансформирование снимка. Трансформирование снимков – это процесс преобразования изображения снимка в проекцию создаваемой карты или плана. В фотограмметрии под трансформированием еще понимают преобразование центральной проекции снимка в ортогональную проекцию. Существуют следующие методы трансформирования: - аналитический; - графический; - фотомеханический; - оптический; - графомеханический; - цифровой. В аналитическом методе за основу принимаются известные выражения (3.12), (3.13). Известные формулы преобразуют изображение точки с координатами x, y, - f в ее изображение на горизонтальной плоскости с координатами X, Y. Если эти координаты X, Y уменьшить в определенном масштабе, то мы получим плановое положение точки.
Графический метод осуществляется построением специальных проективных сеток на плане и на снимке, с помощью которых осуществляют перенос изображения снимка на план. В фотомеханическом методе трансформирование осуществляется специальными фотомеханическими приборами – фототрансформаторами. В оптическом метод е преобразование наклонного снимка в горизонтальный осуществляется оптическими проекторами. В графомеханическом применяют оптико-механические приборы, занимающие промежуточное положение между оптическими проекторами и фототрансформаторами. В цифровом методе каждый элемент цифрового изображения преобразуется из центральной проекции в ортогональную. В связи с развитием цифровых фотограмметрических систем настоящий метод является основным. В основу цифрового трансформирования снимка также полагаются известные формулы (3.12), (3.13). Чтобы получить изображение точки на горизонтальной плоскости в ортогональной проекции и в определенном масштабе m необходимо найти ее координаты:
На основе формул (3.14), (3.15) можно вывести формулы так называемого ортофототрансформирования – трансформирования каждой точки изображения в проекцию плана. Ортогональной проекции А°(рис.3.3) точки А соответствует проекция на плане а°. Абсцисса этой точки в соответствии с пропорцией
равна
После подстановки сюда (3.12), и предполагая, что Xs=0 и Ys=0, получим
Аналогично можно записать, что
Рис. 3.3. Влияние рельефа на трансформирование снимков По формулам (3.16) и (3.17) осуществляется ортофототрансформирование снимков. Пример. Фокусное расстояние равно 100,000мм, Хs=0м, Ys =0м, ZA°= 0м, Zs=1654,17м, Z=154,16 м. Измеренные значения координат точки на наклонном снимке, угловые элементы внешнего ориентирования снимка примем равными приведенным в примере п.3.1 Тогда следуя примеру п.3.1 найдем
и соответственно
Задача 3.2. Выполнить ортофототрансформирование точки снимка по формулам (3.16), (3.17) с измеренными координатами на снимке, приведенными в табл. 3.1. Остальные элементы взять из приведенного в этом параграфе примера
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-12; просмотров: 166; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.188.40.207 (0.024 с.) |


 обозначим через RSA, т.е.
обозначим через RSA, т.е.  = RSA. А вектор
= RSA. А вектор  через r, т. е.
через r, т. е. = r.
= r.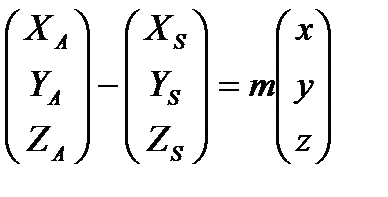 ; (3.3)
; (3.3) ;
; (3.5)
(3.5) (3.6)
(3.6)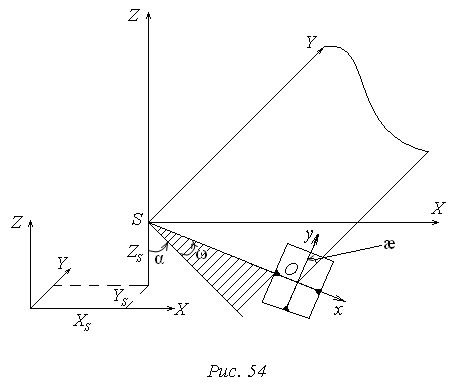
 , (3.7)
, (3.7) , (3.8)
, (3.8) , (3.9)
, (3.9) . (3.10)
. (3.10)
 (3.12)
(3.12) (3.13)
(3.13) , Aω=E, Aκ=E, где Е – единичная матрица – матрица с единичными диагональными членами и нулевыми – недиагональными. Тогда А=Аα и в соответствии с (3.6) найдем
, Aω=E, Aκ=E, где Е – единичная матрица – матрица с единичными диагональными членами и нулевыми – недиагональными. Тогда А=Аα и в соответствии с (3.6) найдем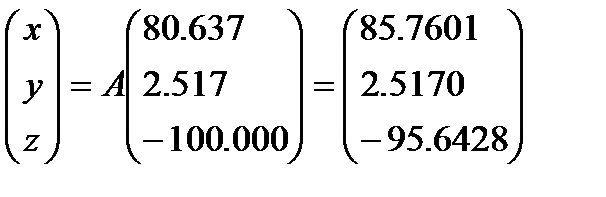
 (3.14)
(3.14) (3.15)
(3.15) - высота фотографирования над конкретной точкой.
- высота фотографирования над конкретной точкой.
 .
. (3.16)
(3.16) (3.17)
(3.17)






