
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Особенности процесса самонаведенияСодержание книги
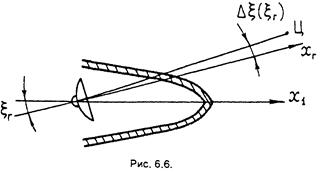
Поиск на нашем сайте Рассмотрим особенности процесса самонаведения на примере метода пропорциональной навигации при движении в вертикальной плоскости. В этом случае наибольший интерес представляет характер изменения угловой скорости линии визирования цели в процессе самонаведения. В зависимости от характера изменения угловой скорости линии визирования Сигнал с выхода ГСН Так как в методе пропорциональной навигации система стремится обратить в нуль угловую скорость линии визирования цели, то по прошествии некоторого времени На II-м этапе происходит слежение за мгновенной точкой встречи. Это слежение конечно сопровождается ошибкой Наконец, в некоторой точке траектории система как бы теряет устойчивость, что проявляется в виде интенсивного нарастания угловой скорости линии визирования цели. Это объясняется тем, что коэффициент усиления кинематического звена Третий этап заканчивается в момент нарушения процесса самонаведения, обозначенного на рисунке точкой Причина “ослепления” может быть разной для различных типов ГСН. Дистанция ослепления может составлять 50-200 м. Одной из причин “ослепления” может быть ограниченная скорость слежения за целью В момент прекращения нормальной работы ГСН она отключается и движение ЛА до встречи с целью происходит по заложенной программе. Следует отметить также следующие особенности процесса самонаведения. Система самонаведения является существенно нестационарной системой, особенно при малых расстояниях между ЛА и целью. В системе самонаведения возможен срыв сопровождения цели ГСН. Для предотвращения этого необходимо тщательно выбирать начальные условия самонаведения и вводить в ГСН дополнительные корректирующие звенья и вычислительные устройства. Чувствительный элемент ГСН устанавливается на головной части ЛА и прикрывается обтекателем. Обтекатель искажает диаграмму направленности чувствительного элемента ГСН, что приводит к ошибке в измерении угла визирования цели. При разработке математической Например, при реализации прямого метода наведения с использованием радиолокационной ГСН возникает ошибка определения местоположения цели Эта зависимость называется пеленгационной характеристикой (рис.6.7).
где Величину градиента пеленгационной характеристики стремятся обеспечить как можно меньшей. Видимо, наилучшими свойствами в этом смысле обладает полусферический обтекатель, так как у него
|
||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 192; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.105.85 (0.006 с.) |

 весь процесс самонаведения можно разделить на три этапа (рис.6.5).
весь процесс самонаведения можно разделить на три этапа (рис.6.5). 
 в контур наведения поступает не сразу после включения головки, а в момент времени, обозначенный на рис. 6.5 точкой
в контур наведения поступает не сразу после включения головки, а в момент времени, обозначенный на рис. 6.5 точкой  . В момент
. В момент  - времени переходного процесса - это начальное рассогласование исчезает. На этом заканчивается I этап самонаведения.
- времени переходного процесса - это начальное рассогласование исчезает. На этом заканчивается I этап самонаведения. , которая обусловлена инерционностью системы управления и действием возмущений.
, которая обусловлена инерционностью системы управления и действием возмущений. (см. формулу (6.20)) неограниченно возрастает по мере сближения с целью, поэтому небольшое отклонение вектора скорости ЛА от направления в мгновенную точку встречи вызывает большую и все возрастающую угловую скорость линии визирования цели. С этого момента начинается третий этап - этап “неустойчивого” движения, когда угловая скорость линии визирования цели неограниченно возрастает.
(см. формулу (6.20)) неограниченно возрастает по мере сближения с целью, поэтому небольшое отклонение вектора скорости ЛА от направления в мгновенную точку встречи вызывает большую и все возрастающую угловую скорость линии визирования цели. С этого момента начинается третий этап - этап “неустойчивого” движения, когда угловая скорость линии визирования цели неограниченно возрастает. . В этот момент нарушается нормальная работа ГСН. Это явление называется “ослеплением” ГСН.
. В этот момент нарушается нормальная работа ГСН. Это явление называется “ослеплением” ГСН. , другой - ограниченный угол пеленга цели
, другой - ограниченный угол пеленга цели  .
. модели ГСН обычно вводят дополнительные звенья, учитывающие влияние ошибок обтекателя.
модели ГСН обычно вводят дополнительные звенья, учитывающие влияние ошибок обтекателя. , которая зависит от ориентации оси антенны относительно корпуса ЛА
, которая зависит от ориентации оси антенны относительно корпуса ЛА  (рис. 6.6).
(рис. 6.6).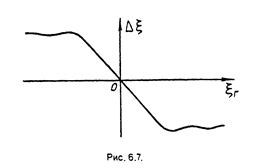 При измерении головкой угловой скорости линии визирования цели на выходе ГСН получаем сигнал, пропорциональный
При измерении головкой угловой скорости линии визирования цели на выходе ГСН получаем сигнал, пропорциональный ,
, - градиент пеленгационной характеристики обтекателя.
- градиент пеленгационной характеристики обтекателя. . Но при этом растет аэродинамическое сопротивление, особенно при движении в плотных слоях атмосферы.
. Но при этом растет аэродинамическое сопротивление, особенно при движении в плотных слоях атмосферы.


