
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Командная система ту-1 при наведении по методу трех точек
При исследовании динамики систем наведения используются математические модели различной степени сложности. Линейные модели используются для предварительного выбора параметров системы наведения, обеспечивающих устойчивость и заданную точность наведения. Нелинейные модели используются для уточнения параметров системы наведения, исследования точности наведения при различных параметрах движения и маневрах цели, а также для исследования точности наведения при действии возмущений и помех. Нелинейная модель. Рассмотрим нелинейную математическую модель для исследования точности командной системы телеуправления первого вида при наведении по методу трех точек в пространстве. Движение осесимметричного ЛА с аэродинамическим управлением в пространстве, рассматриваемого как твердое тело, определяется нелинейной системой дифференциальных уравнений (2.1). Тяга реактивного двигателя и секундный массовый расход будем считать известными функциями времени. Возмущения, действующие на ЛА, могу задаваться в виде: – возмущающих моментов – дополнительных углов отклонения рулей – дополнительных углов атаки К системе уравнений (2.1) добавим уравнения (2.11), (2.12), (2.14), учитывающие динамику контуров стабилизации крена, тангажа и рыскания:
где При выборе параметров контуров стабилизации в вертикальной и боковой плоскостях нужно учесть следующее. Пусть коэффициенты Выберем знак коэффициентов kРПн и kРПв таким образом, чтобы при положительных Для ЛА обычной аэродинамической схемы и схемы ”бесхвостка” при При движении ЛА обычной схемы или схемы ”бесхвостка” в горизонтальной плоскости с
Для ЛА схемы “утка” и с поворотными крыльями при
К системе уравнений (3.1) нужно добавить уравнения, учитывающие ограничения на углы закладки рулей:
Кроме того, чтобы нормальные перегрузки, создаваемые ЛА, не превышали допустимых величин, обычно вводятся ограничения на входные управляющие сигналы:
Ограничения Например, если контур стабилизации перегрузки в вертикальной плоскости представить в виде, показанном на рис. 3.1, где передаточная функция
В этом случае в установившемся режиме
откуда при
Если Сигналы управления
где При наведении по методу трех точек команды управления формируются в виде (см. (2.18)):
где линейные отклонения ЛА от кинематической траектории в вертикальной и горизонтальной плоскостях определяются формулами:
Положение центра масс ЛА относительно командного пункта управления определяется в сферической системе координат следующими уравнениями:
Положение цели в сферической системе координат относительно КПУ определяется аналогичными уравнениями:
При использовании системы уравнений (3.6) движение цели можно задать в виде функций
или записать систему уравнений, определяющих движение цели в виде материальной точки:
В этом случае движение цели нужно задавать в виде программы изменения углов атаки При необходимости можно использовать и более сложные модели движения цели.
Ошибки измерений В (3.11) не учитывается инерционность следящих систем РЛС. Система уравнений (2.1), (3.1) - (3.9), (3.11) определяет динамику процесса наведения командной системы ТУ-1 по методу трех точек. Изменяя параметры системы стабилизации Используя различные методы фильтрации сигналов с выхода РЛС ЛА и цели, можно обеспечить требуемую точность измерения параметров движения ЛА и цели. За счет выбора параметров устройств формирования команд управления Рассмотрим нелинейную математическую модель командной системы ТУ-1 при наведении по методу трех точек в вертикальной плоскости. С учетом системы уравнений (2.2) и рассмотренных математических моделей элементов системы наведения получим следующую систему уравнений:
Исследование точности командной системы ТУ-1 при наведении по методу трех точек с использованием данной системы уравнений рассмотрено в [28]. Аналогичную систему уравнений для исследования точности командной системы ТУ-1 при наведении по методу трех точек в горизонтальной плоскости можно получить на основе систем уравнений (2.3), (3.1) - (3.9), (3.11). Линейная модель. Рассмотрим линейную модель командной системы ТУ-1 при наведении по методу трех точек в вертикальной плоскости. Первый этап продольного возмущенного движения ЛА определяется линейной системой дифференциальных уравнений (2.4). Этой системе уравнений соответствуют передаточные функции (2.8). Структурная схема системы стабилизации ЛА в вертикальной плоскости приведена на рис. 2.3. РЛС ЛА и цели, например, такие как РЛС с ФАР, можно рассматривать как безынерционные звенья. В этом случае сигналы на выходе РЛС можно представить в виде (3.11). Если для измерения угловых координат и дальности используются РЛС с электромеханическим приводом, то для их описания используются линейные системы дифференциальных уравнений и соответствующие им передаточные функции (см., например, (2.15)). Для получения линейной модели кинематического звена, определяющего зависимость
Так как обычно угол
С учетом (3.14) уравнение (3.15) представим в виде
где Дифференцируя это уравнение, получим
Подставляя сюда значение q из (3.16), найдем уравнение для кинематического звена
Считая ускорение
которому соответствует следующая передаточная функция
При отсутствии тангенциального ускорения
Зная
Передаточную функцию устройства формирования команд можно представить в следующем виде
где
Используя линейные модели элементов составим структурную схему командной системы ТУ-1 при наведении по методу трех точек в вертикальной плоскости для линейной модели. Структурная схема приведена на рис. 3.3. Здесь предполагается, что наклонная дальность до ЛА не измеряется, а используется программное значение R(t). На схеме индекс “ Линейная модель телеуправления содержит два основных нестационарных звена:
|
|||||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 229; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.45.162 (0.032 с.) |


 и скольжения
и скольжения  .
. (3.1)
(3.1)
 больше нуля.
больше нуля. и
и  статически устойчивый ЛА всегда совершал движение с положительными нормальными перегрузками
статически устойчивый ЛА всегда совершал движение с положительными нормальными перегрузками  и
и  .
. установившееся значение угла атаки
установившееся значение угла атаки  (коэффициент усиления снаряда
(коэффициент усиления снаряда  отрицателен). При отрицательном угле атаки нормальная перегрузка
отрицателен). При отрицательном угле атаки нормальная перегрузка  коэффициент усиления рулевого привода должен быть отрицательным.
коэффициент усиления рулевого привода должен быть отрицательным. установившееся значение угла скольжения
установившееся значение угла скольжения  (коэффициент усиления снаряда
(коэффициент усиления снаряда  ). При отрицательном угле скольжения нормальная перегрузка в боковой плоскости
). При отрицательном угле скольжения нормальная перегрузка в боковой плоскости  . Следовательно, для движения ЛА с положительной перегрузкой
. Следовательно, для движения ЛА с положительной перегрузкой  при
при  коэффициент усиления рулевого привода
коэффициент усиления рулевого привода  должен быть положительным.
должен быть положительным. (
( . Тогда для движения ЛА с положительной перегрузкой при
. Тогда для движения ЛА с положительной перегрузкой при  нужно взять
нужно взять  положительным.
положительным. При движении ЛА схемы “утка” и с поворотными крыльями при
При движении ЛА схемы “утка” и с поворотными крыльями при  (
( ). При
). При  . Тогда для движения ЛА с положительной перегрузкой
. Тогда для движения ЛА с положительной перегрузкой  при
при  (3.2)
(3.2) (3.3)
(3.3) выбираются с учетом коэффициентов усиления контуров стабилизации перегрузки.
выбираются с учетом коэффициентов усиления контуров стабилизации перегрузки. , тогда передаточная функция замкнутой системы будет иметь вид
, тогда передаточная функция замкнутой системы будет иметь вид
 получим
получим
 то
то  .
. , поступающие на входы систем стабилизации тангажа и рыскания, если не учитывать инерционность и ошибки передачи командной радиолинии управления, можно записать в виде:
, поступающие на входы систем стабилизации тангажа и рыскания, если не учитывать инерционность и ошибки передачи командной радиолинии управления, можно записать в виде: (3.4)
(3.4) - коэффициент передачи КРУ.
- коэффициент передачи КРУ. (3.5)
(3.5) (3.6)
(3.6) (3.7)
(3.7) 3.8)
3.8) (3.9)
(3.9) (3.10)
(3.10) и скольжения
и скольжения  .
. Параметры
Параметры  измеряются РЛС с ошибками. При исследовании точности наведения с учетом ошибок измерений РЛС сигналы, поступающие на вход блоков формирования ошибок
измеряются РЛС с ошибками. При исследовании точности наведения с учетом ошибок измерений РЛС сигналы, поступающие на вход блоков формирования ошибок  , можно представить в виде:
, можно представить в виде: (3.11)
(3.11) моделируются в виде случайных функций с заданными статистическими свойствами, учитывающими особенности используемых радиолокационных визиров.
моделируются в виде случайных функций с заданными статистическими свойствами, учитывающими особенности используемых радиолокационных визиров. и вводя корректирующие звенья, можно обеспечить устойчивость, требуемое качество и точность работы системы стабилизации ЛА.
и вводя корректирующие звенья, можно обеспечить устойчивость, требуемое качество и точность работы системы стабилизации ЛА. и компенсационных поправок
и компенсационных поправок  обеспечивается требуемая точность наведения.
обеспечивается требуемая точность наведения.
 от параметров движения ЛА, необходимо линеаризовать кинематические уравнения:
от параметров движения ЛА, необходимо линеаризовать кинематические уравнения: (3.13)
(3.13) мал, то эти уравнения можно записать так:
мал, то эти уравнения можно записать так: (3.14)
(3.14) (3.15)
(3.15) (3.16)
(3.16) - длина дуги (см. рис. 3.2).
- длина дуги (см. рис. 3.2).
 где
где  - нормальное к вектору скорости ЛА ускорение.
- нормальное к вектору скорости ЛА ускорение. постоянной величиной и усредняя значение скорости V, получим линейное уравнение с постоянным коэффициентом
постоянной величиной и усредняя значение скорости V, получим линейное уравнение с постоянным коэффициентом ,
, (3.17)
(3.17) (3.17) приобретает особенно простой вид
(3.17) приобретает особенно простой вид (3.18)
(3.18) , угол места определяется из следующего соотношения
, угол места определяется из следующего соотношения (3.19)
(3.19) (3.20)
(3.20) - передаточные функции фильтров низких частот, которые вводятся для подавления высокочастотных возмущений, возникающих в процессе дифференцирования и других преобразований ошибки наведения
- передаточные функции фильтров низких частот, которые вводятся для подавления высокочастотных возмущений, возникающих в процессе дифференцирования и других преобразований ошибки наведения  .
.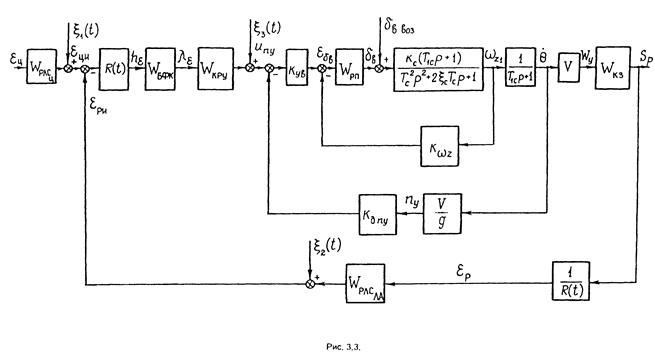
 “ у переменных опущен. Возмущение, действующее на ЛА, представлено в виде дополнительного угла отклонения рулей высоты
“ у переменных опущен. Возмущение, действующее на ЛА, представлено в виде дополнительного угла отклонения рулей высоты  . Возмущения, действующие на РЛС цели, ЛА и радиокомандное устройство, показаны виде дополнительных сигналов
. Возмущения, действующие на РЛС цели, ЛА и радиокомандное устройство, показаны виде дополнительных сигналов 
 что требует для исследования нестационарной линейной системы применения специальных методов.
что требует для исследования нестационарной линейной системы применения специальных методов.


