
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Методы самонаведения. Расчет кинематических траекторий наведенияСодержание книги
Поиск на нашем сайте Основной информацией, используемой в системах СН, является информация о взаимном положении ЛА и цели. Это положение определяется направлением в пространстве линии визирования цели. Поэтому для задания метода СН необходимо определить требуемое положение линии визирования цели относительно какой-либо системы отсчета. В зависимости от выбора этой системы можно методы СН разделить на три группы[16]. Методы первой группы определяют положение линии визирования относительно связанной с ЛА системы координат. При движении в вертикальной плоскости положение Ц относительно ЛА определяется углом пеленга Простейшим методом этой группы может быть метод, при котором угол пеленга Такой метод, когда продольная ось ЛА направлена на цель, называется методом прямого наведения. В другом случае можно использовать связь В общем случае угол пеленга может изменяться по какому либо сложному закону. При наведении ЛА в пространстве с использованием методов первой группы нужно задавать два угла: угол пеленга в вертикальной
Ко второй группе относятся методы наведения, в которых требуется, чтобы линия визирования занимала в процессе сближения вполне определенное положение относительно осей скоростной системы координат. При наведении в вертикальной плоскости в этом случае накладывается связь на изменение угла упреждения Самым простым вариантом является случай Угол упреждения может быть постоянным В общем случае угол упреждения Действительно, уравнение метода пропорциональной навигации при движении в вертикальной плоскости обычно записывается в виде
откуда получаем
тогда
где При наведении ЛА в пространстве с использованием методов второй группы необходимо задавать законы изменения углов упреждения в вертикальной Наконец, к третьей группе относятся те методы наведения, в которых требуется при управлении движением ЛА обеспечить вполне определенное положение линии визирования цели относительно некоторой неподвижной системы координат. При наведении в вертикальной плоскости в этом случае может изменяться, например, в соответствии с некоторым законом угол визирования цели Задаваясь гипотезой о движении цели, можно определить траекторию движения ЛА, определяемую методом наведения.
Например, для расчета кинематической траектории наведения ЛА по методу пропорциональной навигации в вертикальной плоскости можно использовать следующую систему уравнений: 1. 2. 3. 4. 5. 6. 7. 8. 9. Система СН должна обеспечить движение ЛА по траектории, близкой к расчетной траектории, определяемой методом наведения. Для составления структурной схему ССН нужно, прежде всего, выбрать способ формирования сигнала ошибки наведения. Этот сигнал должен характеризовать отклонение движения ЛА от теоретической траектории, определяемой методом наведения. На основе сигнала ошибки наведения формируется команда управления
|
||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 464; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.009 с.) |

 (рис. 4.2):
(рис. 4.2):  , где
, где  - угол визирования цели.
- угол визирования цели. .
. , тогда получим метод прямого наведения с постоянным упреждением.
, тогда получим метод прямого наведения с постоянным упреждением. и горизонтальной
и горизонтальной  плоскостях, где
плоскостях, где  и
и  - углы визирования цели в вертикальной и горизонтальной плоскостях,
- углы визирования цели в вертикальной и горизонтальной плоскостях, 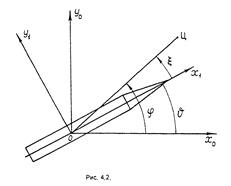

 (угол между линией визирования и вектором скорости ЛА) (рис. 4.3).
(угол между линией визирования и вектором скорости ЛА) (рис. 4.3). , когда вектор скорости ЛА всегда направлен на цель. Такой метод наведения называется методом погони.
, когда вектор скорости ЛА всегда направлен на цель. Такой метод наведения называется методом погони. - тогда имеем метод погони с постоянным упреждением.
- тогда имеем метод погони с постоянным упреждением.
 ,
, ,
, .
. и горизонтальной плоскостях
и горизонтальной плоскостях  .
. (рис. 4.4). Такой метод наведения называется методом параллельного сближения. При реализации метода параллельного сближения в пространстве должны оставаться постоянными два угла визирования цели: в вертикальной плоскости
(рис. 4.4). Такой метод наведения называется методом параллельного сближения. При реализации метода параллельного сближения в пространстве должны оставаться постоянными два угла визирования цели: в вертикальной плоскости  , и горизонтальной
, и горизонтальной  .
. Характерной особенностью методов второй и третьей группы является то, что траекторию наведения можно рассчитать без учета инерционности ЛА и системы управления, т.е. рассчитать кинематические траектории наведения.
Характерной особенностью методов второй и третьей группы является то, что траекторию наведения можно рассчитать без учета инерционности ЛА и системы управления, т.е. рассчитать кинематические траектории наведения. ;
; ;
; ;
; ;
; ;
; ;
; ;
; ,
, .
. .
.


