
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Методы наведения телеуправляемых летательных аппаратов. Расчет кинематических траекторий наведенияСтр 1 из 24Следующая ⇒
ТОЛПЕГИН О.А. НОВИКОВ В.Г.
МАТЕМАТИЧЕСКИЕ МОДЕЛИ СИСТЕМ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
КОЛОМНА 2011 Издательство КИ (ф) МГОУ УДК ББК
Толпегин О.А., Новиков В. Г. Математические модели систем наведения летательных аппаратов. – Коломна: Издательство КИ(ф) МГОУ, 2011 – 112 с.
В данном пособии рассмотрены основные принципы построения систем наведения летательными аппаратами. Изложена теория, позволяющая применить знания ТАУ, математики на практических задачах – задачах построения систем управления и наведения летательных аппаратов. Приведены математические соотношения, позволяющие произвести моделирования систем наведения. Пособие предназначено для инженерных работников, студентов и аспирантов, работающих в области теории управления, разработки, моделирования и конструирования систем летательных аппаратов.
УДК ББК © Толпегин О.А., Новиков В. Г.
Оглавление Оглавление. 3 Введение. 4 Часть 1. СИСТЕМЫ ТЕЛЕУПРАВЛЕНИЯ.. 5 Глава 1. Общая характеристика систем телеуправления. 5 1.1. Классификация. 5 1.2. Методы наведения телеуправляемых летательных аппаратов. Расчет кинематических траекторий наведения. 7 1.3 Командная система телеуправления первого вида (ТУ-1) 9 1.4 Командная система телеуправления второго вида (ТУ-2) 13 1.5. Система телеуправления по лучу. 17 1.6. Система телеуправления по лучу вращающегося летательного аппарата. 18 1.7. Перекрестные связи между каналами управления и явление “скручивания” систем координат 21 Глава 2. Математические модели элементов системы телеуправления. 22 2.1. Уравнения движения летательного аппарата. 22 2.2. Система стабилизации. 28 2.3. Радиолокационные визиры.. 32 2.4. Оптические визиры.. 41 2.5 Устройство формирования команд. 44 2.6. Командная радиолиния управления. 48 Глава 3. Математические модели систем телеуправления. 49 3.1. Командная система ТУ-1 при наведении по методу трех точек. 49 3.2. Командная система ТУ-1 при наведении с использованием спрямляющих методов. 56 3.3 Система наведения по лучу с использованием метода трех точек. 56 3.4. Математическая модель системы наведения по лучу вращающегося ЛА.. 59 3.5 Исследование динамики систем телеуправления. 62 Часть 2. СИСТЕМЫ САМОНАВЕДЕНИЯ.. 66
Глава 4. Общая характеристика систем самонаведения. 66 4.1. Классификация. 66 4.2. Методы самонаведения. Расчет кинематических траекторий наведения. 68 4.3 Способы формирования сигнала ошибки наведения. 71 4.4. Функциональная схема системы самонаведения. 75 Глава 5. Математические модели головок самонаведения. 77 5.1 Классификация. 77 5.2 ГСН со следящим (негироскопическим) приводом. 78 5.3 ГСН с гироскопической стабилизацией. 80 5.4. Особенности оптических головок самонаведения. 83 Глава 6. Математические модели систем самонаведения. 84 6.1 Система самонаведения по методу пропорциональной навигации. 84 6.2 Система самонаведения по методу прямого наведения. 94 6.3 Особенности процесса самонаведения. 96 6.4. Исследование динамики систем самонаведения. 98 Глава 7. Оценка эффективности стрельбы ЗУР.. 101 7.1 Показатели эффективности стрельбы.. 101 7.2. Расчет вероятности поражения цели одной ракетой. 103 7.3. Расчет зон поражения и пуска ЗУР. 107 ЛИТЕРАТУРА.. 110
Введение Наведение летательного аппарата (ЛА) на движущуюся цель (Ц) является непрерывным процессом автоматического управления ее положением. В результате ЛА выводится в область встречи с целью и поражает ее. Управление осуществляется системой наведения (управления). Систему наведения можно рассматривать как автоматическую систему управления движением ЛА относительно некоторой расчетной траектории, определяемой методом наведения. Разработка систем наведения включает в себя следующие основные вопросы: 1. Выбор метода наведения. 2. Выбор состава измерительных средств. 3. Составление структурной схемы системы управления. 4. Составление математических моделей элементов структурной схемы и системы в целом. 5. Исследование системы наведения методами анализа и синтеза. Исследование систем наведения проводится для оценки точности, дальности, помехоустойчивости, а также для решения целого ряда других вопросов, например, надежности системы управления. Пособие предназначено для студентов старших курсов, поэтому при его написании предполагалось, что читатель знаком с рядом специальных курсов: аэродинамика, динамика полета, теория систем автоматического управления.
Основное внимание в пособии уделяется созданию математических моделей для исследования динамики систем наведения ЛА с аэродинамическим управлением. В первой части пособия рассмотрены системы телеуправления, а во второй - системы самонаведения. В последней части пособия рассмотрены вопросы оценки эффективности систем наведения зенитных управляемых ракет (ЗУР). Основное внимание уделяется методике составления математических моделей для исследования динамических свойств систем наведения на ЭВМ. Методы анализа и синтеза систем наведения в пособии практически не рассматриваются, так как этим методам посвящено много работ, часть из которых приведена в списке литературы. Часть 1. СИСТЕМЫ ТЕЛЕУПРАВЛЕНИЯ Глава 1. Общая характеристика систем телеуправления Классификация Телеуправляемые ЛА - это ЛА, управление которыми осуществляется на расстоянии с помощью аппаратуры, расположенной на командном пункте управления. Системы телеуправления ЛА делятся на две группы: – командные системы телеуправления; – системы управления по лучу (системы теленаведения). В командных системах телеуправления сигнал управления формируется на командном пункте управления и по линии связи передается на борт ЛА. В зависимости от способа измерения координат цели и определения ее положения относительно ЛА системы командного телеуправления разделяются на системы телеуправления первого вида (ТУ-1) и системы телеуправления второго вида (ТУ-2). В системе ТУ-1 координаты цели измеряются устройствами, размещенными на пункте управления, в системе ТУ-2 - бортовым координатором ЛА с последующей их передачей на пункт управления. Выработка команд управления ЛА как в первом, так и во втором случае осуществляется наземным пунктом управления. Схема командной системы телеуправления первого вида показана на рис. 1.1. Определение текущих координат цели и ЛА (например, дальности, азимута и угла места) осуществляется радиолокационной станцией (РЛС) сопровождения. В некоторых комплексах эта задача решается двумя радиолокаторами, один из которых сопровождает цель (РЛС Ц), а другой - ЛА (РЛС ЛА). Измеренные значения координат цели и ЛА подаются в устройство выработки команд (УВК). Формирование команды осуществляется в соответствии с выбранным методом наведения и принятым параметром рассогласования. Выработанные для каждой плоскости наведения команды управления шифруются и по командной радиолинии управления (КРУ) передаются на борт ЛА. Эти команды принимаются бортовым приемником, усиливаются, дешифруются и в виде определенных сигналов подаются в автопилот для управления угловым положением ЛА. Процесс управления ЛА осуществляется непрерывно до его встречи с целью. Командная система ТУ-1 не требует увеличения состава и массы бортовой аппаратуры, обладает большой гибкостью по числу и геометрии возможных траекторий ЛА. Основной недостаток системы - зависимость величины линейной ошибки наведения ЛА на цель от дальности стрельбы. С увеличением дальности наведения линейная ошибка возрастает. Поэтому системы телеуправления первого вида используются для поражения целей на малых и средних дальностях.
В командных системах ТУ-1 для правильного выполнения команд, передаваемых с командного пункта управления на борт ЛА, необходимо обеспечить совпадение осей системы координат на станции наведения и на борту ЛА. Это осуществляется обычно с помощью системы стабилизации крена. В этом случае нужно знать величину угла крена, то есть на борту ЛА должен быть датчик угла крена. Система стабилизации крена может отсутствовать, если на борту ЛА имеется система измерения углов ориентации осей, связанной системы координат и передачи их на командный пункт.
В системе ТУ-2 не требуется стабилизировать крен, так как сигнал управления вырабатывается в системе координат, связанной с ЛА. Достоинства системы ТУ-2 - высокая точность наведения, не зависящая от дальности стрельбы, возможность селекции и распознавания целей, возможность наведения на одну цель нескольких ЛА одновременно; недостатки - более сложная бортовая аппаратура. В системах телеуправления по лучу сигналы управления вырабатываются на борту ЛА по измеряемым отклонениям ЛА от оси луча радиолокатора (или оптического, или теплового), который перемещается в пространстве в соответствии с принятым методом наведения. Системы теленаведения бывают одно- и двухлучевые (рис.1.3).
Если на борту ЛА имеется система измерения углов ориентации осей связанной системы координат и передачи их в блок формирования команды, то система стабилизации крена может отсутствовать. Кроме систем телеуправления и систем самонаведения, рассмотренных во второй части пособия, применяются комбинированные системы наведения, в которых наведение ЛА на цель осуществляется последовательно несколькими системами. Они находят применение в комплексах дальнего действия. Это может быть комбинация командной системы телеуправления на начальном участке траектории полета ЛА и самонавдения на конечном, или наведение по лучу на начальном участке и самонаведение на конечном, что обеспечивает наведение ЛА на цель с достаточной точностью при больших дальностях наведения.
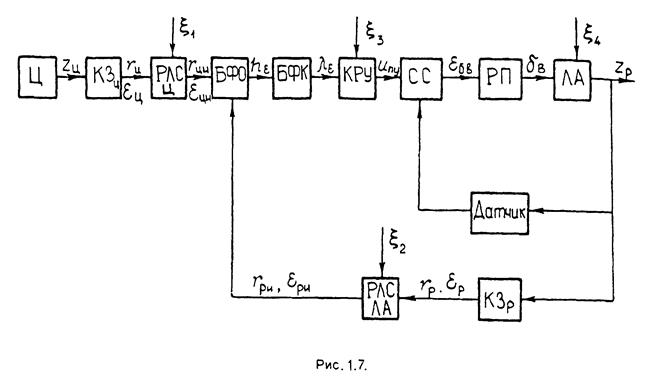
Принципиально возможны и другие варианты построения систем наведения ЛА. Функциональная схема. Рассмотрим функциональную схему командной системы телеуправления первого вида в вертикальной плоскости (рис. 1.6). Наведение в горизонтальной плоскости осуществляется аналогично. Измерение координат цели и ЛА в общем случае осуществляется станцией наведения с некоторыми ошибками. Поэтому на рис. 1.6 обозначения В блоке формирования ошибки (БФО) наведения вычисляется линейное отклонение ЛА в вертикальной плоскости Система стабилизации формирует электрический сигнал, который поступает на рулевой привод. Рулевой привод изменяет угловое положение рулей высоты. На рулевых поверхностях возникает дополнительная подъемная сила, которая вызывает вращение ЛА вокруг поперечной оси. Изменение углового положения ЛА приводит к изменению аэродинамических сил, действующих на ЛА, и как следствие, параметров движения ЛА. РЛС определяет координаты местоположения ЛА Локатор цели, локатор ЛА и командная радиолиния управления подвержены воздействию различных помех, что отображено на схеме возмущениями Структурная схема. Рассмотрим структурную схему командной системы телеуправления первого вид при наведении в вертикальной плоскости (рис. 1.7).
На рисунке введены следующие новые обозначения: КЗ - кинематическое звено, которое определяет связь между параметрами движения ЛА (скорость, координаты центра масс, угол тангажа, угол наклона траектории и др.), которые на рис. 1.7 обозначены в виде вектора РП - рулевой привод ЛА; СС - система стабилизации ЛА в вертикальной плоскости. На основе команды управления
Ошибка наведения Рисунок 1.7 наглядно показывает, что система телеуправления является замкнутой автоматической системой, причем цель, а следовательно, и система измерения координат цели (локатор цели) не входят в замкнутый контур. Движение цели является внешним входным воздействием для контура наведения ЛА: возмущения Для выбора параметров системы наведения, обеспечивающих устойчивость, требуемое качество и точность наведения, необходимо на основе структурной схемы составить математическую модель системы наведения, учитывающую принятый метод наведения, используемый набор измерительных средств, особенности управления ЛА, действующие возмущения и другие факторы. Составление математической модели системы наведения предполагает наличие математических моделей элементов, входящих в эту систему. Математические модели элементов системы телеуправления рассмотрены в следующей главе. Приведем примеры систем ТУ-1 Зенитный ракетный комплекс “Кроталь” (Франция) [20]. В состав зенитного ракетного комплекса (ЗРК) входит центр управления и до трех стрельбовых установок (рис.1.8). Центр управления представляет собой транспортер с импульсно-доплеровской РЛС обнаружения и опознования цели и аппаратурой управления огнем. Сообщается, что дальность обнаружения типовой цели составляет 18,5 км. РЛС снабжена специальной ЭВМ и может работать в режиме автосопровождения по 12 целям. Каждая стрельбовая установка предназначена для обстрела одной цели и управления двумя зенитными ракетами. Она размещается на одном транспортере и включает: РЛС слежения за целью, пусковую установку с четырьмя направляющими, радиопередатчик команд, Стартовая масса ракеты 85 кг, длина - 3м, диаметр - 0,16м, размах крыльев - 0,54м. РДТТ обеспечивает достижение ракетой скорости 800 м/с через 2,3 с. Дальность поражения целей 0,5 - 8,5 км. Время полета на максимальную дальность 19 с, к этому моменту скорость ракеты снижается до 300 м/с. Зенитный ракетный комплекс “ Роланд - 2 ”(ФРГ и Франция) [9]. Комплекс расположен на одном транспортере и включает: РЛС обнаружения и сопровождения цели, оптическую систему слежения за целью и инфракрасную систему слежения за ракетой. Кроме командной системы телеуправления первого вида используется система наведения по лазерному лучу. Комплекс высокомбильный, может вести автономную боевую работу, оснащен устройством автоматического заряжания пусковой установки, обеспечивающего скорострельность - 4 выстрела в минуту. Стартовая масса ракеты 66,5 кг, длина - 2,5м, диаметр - 0,16м, размах крыльев - 0,5м. Максимальная дальность перехвата целей - 6,3 км. Пример системы ТУ – 2. Зенитный ракетный комплекс “Пэтриот” (США) [18], [20]. Предназначен для поражения дозвуковых и сверхзвуковых самолетов на различных высотах, исключая предельно-малые, а также ракет тактического, а в последних модификациях и оперативно-тактического назначения, в условиях широкого применения средств электронного противодействия.
В комплексе используется комбинированная система наведения: на начальном участке - программное управление, на среднем - командное телеуправление первого вида, на заключительном участке - система телеуправления второго вида. Для реализации ТУ-2 на борту ракеты установлен радиолокационный координатор цели, который определяет угловые координаты линии ракета-цель. Эти координаты по отдельному высокочастотному каналу передаются на специальную антенну РЛС и далее поступают в блок формирования ошибок пункта управления огнем. Сюда же поступает информация о параметрах движения ракеты и цели, полученная с помощью РЛС с ФАР. Команды с выхода блока формирования команд передаются по главному лучу излучения РЛС на борт ракеты, где после преобразования поступают на рули управления полетом ЗУР, а также на привод антенны координатора цели для обеспечения непрерывного слежения за целью по угловым координатам. Ракета одноступенчатая, твердотопливная с начальной массой около 630 кг. Длина ракеты - 5,2м, диаметр - 0,4м. Время работы двигателя - 13с. Максимальная скорость - 1700м/с. Многофункциональная РЛС с ФАР может одновременно сопровождать до 100 целей, а комплекс одновременно обстреливать до 8 целей, наводя на каждую цель до трех ЗУР. Система стабилизации Управление угловым положением ЛА происходит за счет вращения относительно трех его осей 0 x1, 0 y1 и 0 z1, проходящих через центр масс. Система стабилизации предназначена для сохранения требуемого углового положения ЛА или установившегося углового движения. Для управления вокруг продольной оси ОХ используется система стабилизации крена, для управления вокруг оси ОZ- система стабилизации тангажа и система стабилизации рыскания применяется для управления вокруг оси ОУ. Управление ЗУР обычно происходит в декартовой системе координат. В этом случае основной задачей системы стабилизации крена является сохранение угла крена неизменным и равным нулю. Тогда система стабилизации тангажа осуществляет управление угловым положением ЛА в вертикальной плоскости, а система стабилизации рыскания - в боковой плоскости. Для поворота без крена ЗУР обычно имеют крестообразную аэродинамическую схему. Это существенно повышает быстродействие ЛА [29]. Системы стабилизации ЗУР одновременно выполняют функции управления нормальными перегрузками. У большинства ЗУР наблюдается слабое затухание возмущенного движения из-за небольших размеров оперения, поэтому у них достаточно трудно обеспечить управление нормальными перегрузками. Процесс управления нормальными перегрузками существенно ухудшается из-за непостоянства динамических характеристик ракеты от высоты и скорости полета, поэтому одной из задач системы стабилизации следует считать необходимость исправления динамических характеристик ракеты. Система стабилизации должна обеспечивать высокое быстродействие ЛА, но при этом должна уменьшать влияние внешних возмущений и внутренних шумов аппаратуры. К числу дополнительных требований, предъявляемых к системам стабилизации ЛА данного класса, следует отнести уменьшение дестабилизирующего действия обтекателя координатора цели, снижение взаимного влияния между каналами управления и крена. Для осесимметричных ЛА при нулевом угле крена управления движениями тангажа и рыскания можно рассматривать как независимые друг от друга и выполнять их идентичными. Рассмотрим системы стабилизации каналов крена, тангажа и рыскания для осесимметричных ЛА с аэродинамическим управлением и крестообразным расположением крыльев. Стабилизация движения крена Основной задачей системы стабилизации крена при телеуправлении и самонаведении осесимметричных ЛА является сохранение угла крена неизменным и равным нулю. Для ослабления влияния перекрестных связей между каналами крена, тангажа и рыскания контур стабилизации крена должен обладать максимальным быстродействием и иметь минимальную величину перерегулирования.
В наибольшей степени этим требованиям удовлетворяет контур стабилизации угла крена со свободным и дифференцирующим гироскопами (рис.2.1). На этой схеме: kwx -коэффициент усиления дифференцирующего гироскопа, измеряющего угловую скорость крена; k g - коэффициент усиления свободного гироскопа, измеряющего угол крена; РП - рулевой привод. Введение двух обратных связей позволяет повысить коэффициент усиления системы, увеличить запасы устойчивости и уменьшить время переходного процесса системы стабилизации угла крена. Если инерционность рулевого привода учитывать с помощью апериодического звена первого порядка с передаточной функцией
то уравнения, учитывающие динамику системы стабилизации угла крена на основе схемы, приведенной на рис.2.1, можно записать в виде:
Однако сформированная система стабилизации угла крена является статической и ей присущи все недостатки подобного рода систем.
В тех случаях, когда требуется повысить точность стабилизации угла крена путем устранения установившейся ошибки по углу g, применяются астатические системы стабилизации. Система стабилизации в этом случае формируется за счет применения операционных усилителей (рис.2.2) или дополнительного включения в обратную связь интегрирующего гироскопа. Но данные системы являются более сложными и менее надежными. Радиолокационные визиры Определение скорости цели Радиолокационный визир позволяет определить радиальную составляющую скорости движения цели относительно точки наблюдения (рис.2.10).
Частота отраженных от цели колебаний получит также некоторое приращение, равное
Отношение
тогда Сигналы, принятые от цели, после усиления поступают в смеситель, куда подается и сигнал частоты
В состав радиолокационного устройства измерения скорости цели входят передатчик, приемник, передающая и принимающая антенны, смеситель, усилитель сигналов доплеровских частот, фильтры. Оптические визиры Цель может освещаться Солнцем, прожектором или лазером. Падающие на поверхность цели лучи отражаются от каждого элемента под углом, равным углу падения. При сложной конфигурации элементов цели отражение происходит в различных направлениях, что позволяет наблюдать отраженные световые сигналы в различных точках наблюдения. Световое излучение занимает диапазон электромагнитных волн от 0,36 до 0,75 мкм. Световая волна распространяется со скоростью с = 3 10 м/с. Распространяющееся световое излучение создает фон, освещая облака и другие предметы. Видимый контраст цели обусловлен тем, что цель обладает большей способностью отражать световые волны, чем окружающая ее атмосфера. Чем больший контраст имеет цель, тем стабильнее поступающий от нее поток энергии и лучше условия определения параметров. При прохождении через атмосферу часть энергии световых волн теряется в результате рассеивания и поглощения, что снижает дальность обнаружения и сопровождения цели. Рассеивание в атмосфере зависит от влаги и пыли. Значительное рассеивание создают туманы и дымки. Поглощение происходит в основном парами воды, углекислым газом и озоном, причем с увеличением их концентрации величина поглощения растет. Для извлечения информации о параметрах движения цели в диапазоне световых волн применяют оптические визиры и координаторы. Обычно это следящие устройства, обеспечивающие непрерывное сопровождение цели и определение ее угловых координат. Кроме светового излучения ЛА являются источниками теплового излучения. Лучистая энергия излучается в диапазоне инфракрасных волн от 0,76 до 750 (1000) мкм. Излучательная способность определяется типом ЛА и излучение может иметь различную длину волны в виде узких полос спектра при длинах волн 1,3; 1,9; 2,7; 3,5; 4,3 мкм. Атмосфера по-разному поглощает инфракрасное излучение (ИК-излучение) в зависимости от длины волны. Атмосфера имеет окна пропускания ИК-излучения в зависимости от длины волны. Рабочий диапазон волн ИК-излучения следует выбирать с учетом окон пропускания атмосферы и спектра излучения цели. Оптические и телевизионно-оптические визиры сравнительно просты по устройству и надежны в работе, они не подвержены воздействию радиопомех, имеют высокую разрешающую способность и позволяют непосредственно отображать сами наблюдаемые объекты, а не отметки от них, как в радиолокационных визирах. Такие визиры находят применение в ряде зенитных комплексов (Рапира”, “Иджес” и др.) и иногда дублируют радиолокационные визиры. Визиры могут быть световыми (l= 0,4 - 0,76 мкм) и инфракрасными (l= 0,76 - 1 мкм). Оптические визиры (ОВ) делятся на пассивные, активные и полуактивные в зависимости от места расположения источника излучения. В пассивных ОВ наблюдение за целью осуществляется в окуляр или на телевизионном экране. В активных ОВ определение местоположения ЛА осуществляется по энергии специального источника излучения (трассера), установленного на борту ЛА. В полуактивных визирах для подсветки цели используют оптический квантовый генератор (лазер), поэтому полуактивный ОВ называют лазерным визиром.
В оптически - телевизионных визирах отметка на экране видеоконтрольного устройства совмещается с изображением цели. В этом случае оптическая ось визира будет направлена на цель, что позволяет определить углы азимута и места цели. Рассмотрим принцип работы телевизионного оптического визира (рис.2.12). Допустим, что изображение объекта на экране индикатора смещено на величину Если фокусное расстояние объектива равно F, то смещение изображения на расстояние Аналогично можно определить и смещение по азимуту Телевизионно - оптическая система стремится к тому, чтобы Лазерные визиры могут измерять не только углы, но и дальность до цели и, кроме того, обладают избирательностью, то есть могут выделять полезный сигнал на фоне других излучений. От радиолокационных визиров лазерные отличаются высокой разрешающей способностью по угловым координатам при сравнительно малых размерах антенной системы, практически не подвержены влиянию отражений от местных предметов, обеспечивают высокую скрытность работы.
По своей структуре, принципам построения и выполнимым функциям лазерные визиры почти полностью аналогичны радиолокационным. Лазерный визир позволяет определять угловые координаты, дальность и скорость цели. На рис. 2.13 приведена структурная схема лазерного визира цели (RBS - 70) [7]. В качестве источника оптического сигнала используется лазерный передатчик, запуск которого осуществляется импульсным синхронизатором. Световой сигнал лазера, пройдя систему зеркал телескопа (антенны), излучается в пространство, отражается от цели и принимается телескопом, при этом узкополосный фильтр, стоящий на пути отраженного импульса, уменьшает воздействие посторонних источников света на работу визира. Далее отраженные световые импульсы попадают на светочувствительный приемник, преобразуются в сигналы видеочастоты и используются как в блоке измерения углов, так и в блоке измерения дальности. Измерение углов осуществляется в результате непрерывного совмещения оптической оси телескопа с направлением на цель. Если передатчик работает в импульсном режиме, то в блоке измерения дальности до цели по времени задержки отраженного от цели импульса относительно зондирующего определяется дальность до цели. Классификация Самонаведением называется такой метод управления, при котором на борту ЛА измеряются параметры движения цели и формируются команды управления, обеспечивающие наведение ЛА на цель. В зависимости от места расположения первичного источника электромагнитного излучения различают активные, полуактивные, пассивныеи комбинированные системы самонаведения (ССН). При активном самонаведении ЛА, облучая цель бортовым передатчиком, наводится по отраженному сигналу. При полуактивном цель облучается передатчиком, установленном на командном пункте управления, а на ЛА имеется только приемник. Возможны ситуации,когда цель сама является источником электромагнитного излучения, например теплового от работающего двигателя. В этих случаях возможно применение пассивного самонаведения по сигналу, излучаемому самой целью. Комбинированные системы самонаведения совмещают в себе полуактивно- или активно-пассивные системы. В зависимости от ситуации используется тот сигнал от цели, который обеспечивает лучшие характеристики наведения (точность, помехоустойчивость, дальность действия). Преимущество активной системы самонаведения состоит в полной автономности управления. Но бортовая аппаратура активной системы получается более громоздкой. Ограничение мощности бортового передатчика приводит к ограничению дальности действия. Полуактивные системы не обладают полной автономией управления, поскольку антенна КПУ должна облучать цель в течении всего времени наведения. Однако дальность действия таких систем больше, чем активных, а бортовая аппаратура ЛА проще, имеет меньшую массу и габариты. Дальность в таких системах увеличивается за счет того, что на КПУ может быть установлен более мощный передатчик. Пассивные системы обладают полной автономией и имеют наилучшие массогабаритные характеристики, но их работа полностью зависит от излучения цели. В таких системах невозможно измерять дальность и скорость сближения с целью. В зависимости от диапазона электромагнитных волн различают радиолокационные, тепловые (инфракрасные) и оптические системы самонаведения. Радиолокационные системы работают в радиодиапазоне в окнах прозрачности атмосферы. Радиоволны, отраженные от цели, рассеиваются во всех направлениях примерно одинаково. Благодаря этому самонаведение радиолокационных систем возможно с любого направления. Метеоусловия мало влияют на работу радиолокационных систем. Но радиолокационные системы имеют более широкие диаграммы направленности антенн, что снижает их точность и разрешающую способность по сравнению с тепловыми и оптическими системами самонаведения. Тепловые системы используются в инфракрасном диапазоне волн. Они, как правило, пассивные и более простые по сравнению с радиолокационными. Их точность и разрешающая способность выше. Однако эффективность работы тепловых систем сильно зависит от метеоусловий. Кроме того, интенсивность теплового излучения у многих целей существенно различается в зависимости от направления. Поэтому дальность действия тепловых систем сильно меняется при изменении направления наведения. В оптических системах самонаведения используются видимые лучи (длина волны 0,76...0,4 мкм). Такие системы строятся на основе телевизионных, оптических и лазерных устройств. Их отличает очень высокая точность и ра
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 634; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.189.22.136 (0.094 с.) |
 В командных системах телеуправления второго вида (рис. 1.2) координатор цели устанавливается на борту ЛА. Он осуществляет слежение за целью и определение ее текущих координат относительно осей, связанных с ЛА. Координаты цели по каналу связи передаются на пункт управления и подаются в устройство выработки команд управления. От станции сопровождения (радиовизира) ЛА в УВК также поступают текущие координаты ЛА. Устройство выработки команд определяет параметр рассогласования и формирует команды управления, которые после соответствующих преобразований командной радиолинией управления (КРУ) передаются на борт ЛА.
В командных системах телеуправления второго вида (рис. 1.2) координатор цели устанавливается на борту ЛА. Он осуществляет слежение за целью и определение ее текущих координат относительно осей, связанных с ЛА. Координаты цели по каналу связи передаются на пункт управления и подаются в устройство выработки команд управления. От станции сопровождения (радиовизира) ЛА в УВК также поступают текущие координаты ЛА. Устройство выработки команд определяет параметр рассогласования и формирует команды управления, которые после соответствующих преобразований командной радиолинией управления (КРУ) передаются на борт ЛА. В системах телеуправления по лучу обычно требуется обеспечить стабилизацию угла крена, так как необходимо совмещение осей системы координат, связанных с лучом, с осями ЛА.
В системах телеуправления по лучу обычно требуется обеспечить стабилизацию угла крена, так как необходимо совмещение осей системы координат, связанных с лучом, с осями ЛА. соответствуют действительным, а с индексом “и“ - измеренным значениям координат цели и ЛА.
соответствуют действительным, а с индексом “и“ - измеренным значениям координат цели и ЛА. и этот сигнал поступает на вход блока формирования команды (БФК) управления, с выхода которого команда управления
и этот сигнал поступает на вход блока формирования команды (БФК) управления, с выхода которого команда управления  поступает на вход командной радиолинии управления. Команда
поступает на вход командной радиолинии управления. Команда  по линии радиоуправления поступает на вход системы стабилизации ЛА в вертикальной плоскости.
по линии радиоуправления поступает на вход системы стабилизации ЛА в вертикальной плоскости. и измеренные величины
и измеренные величины  поступают в блок формирования ошибки наведения.
поступают в блок формирования ошибки наведения. . Возмущения, действующие на ЛА, показаны в виде возмущения
. Возмущения, действующие на ЛА, показаны в виде возмущения  .
.
 , и теми величинами, которые могут измерять станции наблюдения (в данном случае угол места
, и теми величинами, которые могут измерять станции наблюдения (в данном случае угол места  и наклонная дальность
и наклонная дальность  );
); , что приводит к изменению параметров движения ЛА (изменению вектора
, что приводит к изменению параметров движения ЛА (изменению вектора  учитывают воздействия различных помех на локатор цели, локатор ЛА, командную радиолинию и ЛА.
учитывают воздействия различных помех на локатор цели, локатор ЛА, командную радиолинию и ЛА.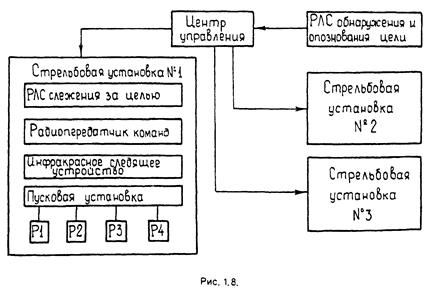 инфракрасное следящее устройство и вспомогательное оборудование.
инфракрасное следящее устройство и вспомогательное оборудование. В состав комплекса (рис. 1. 13) входят многофункциональная РЛС с фазированной антенной решеткой (ФАР), пункт управления огнем (специальный контейнер, установленный на шасси автомобиля), до восьми пусковых установок (по четыре ЗУР на каждой в транспортно-пусковых контейнерах), источники электроснабжения и вспомогательная аппаратура.
В состав комплекса (рис. 1. 13) входят многофункциональная РЛС с фазированной антенной решеткой (ФАР), пункт управления огнем (специальный контейнер, установленный на шасси автомобиля), до восьми пусковых установок (по четыре ЗУР на каждой в транспортно-пусковых контейнерах), источники электроснабжения и вспомогательная аппаратура.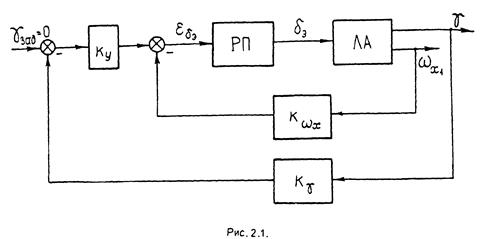
 (2.11)
(2.11)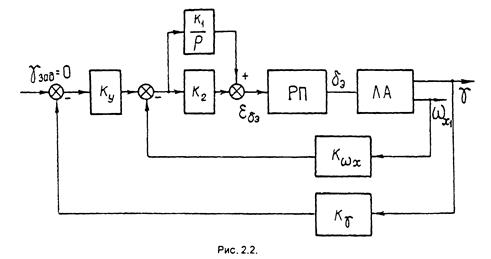
 Определение скорости цели сводится к измерению доплеровского приращения частоты отраженного движущейся целью сигнала. Электромагнитные колебания, поступающие к движущемуся объекту (цели), получают некоторое приращение частоты, называемое доплеровским, в результате частота облучающих цель сигналов
Определение скорости цели сводится к измерению доплеровского приращения частоты отраженного движущейся целью сигнала. Электромагнитные колебания, поступающие к движущемуся объекту (цели), получают некоторое приращение частоты, называемое доплеровским, в результате частота облучающих цель сигналов
 поэтому принимаемые антенной сигналы будут иметь частоту колебаний
поэтому принимаемые антенной сигналы будут иметь частоту колебаний .
. поэтому множитель
поэтому множитель
 . На выходе смесителя может быть выделена частота
. На выходе смесителя может быть выделена частота  , которая пропорциональна
, которая пропорциональна  и называется доплеровской. Измерив ее значение, можно определить величину радиальной составляющей скорости цели
и называется доплеровской. Измерив ее значение, можно определить величину радиальной составляющей скорости цели
 При автоматическом сопровождении цели определяется сигнал, пропорциональный отклонению цели от оптической оси визира, на основании которого в дальнейшем формируются команды управления ЛА.
При автоматическом сопровождении цели определяется сигнал, пропорциональный отклонению цели от оптической оси визира, на основании которого в дальнейшем формируются команды управления ЛА. по горизонтали и на величину по вертикали
по горизонтали и на величину по вертикали  .
.
 (при малых углах e и c).
(при малых углах e и c). .
. Но лазерные визиры имеют ряд недостатков. Одним из них является зависимость дальности действия от погодных условий (туман, дождь, снег). Другим недостатком является необходимость выдачи точного целеуказания (предварительное наведение луча лазера на цель), при котором обеспечивается быстрое обнаружение и автоматическое сопровождение цели. В связи с этим лазерные визиры работают обычно совместно с радиолокационными.
Но лазерные визиры имеют ряд недостатков. Одним из них является зависимость дальности действия от погодных условий (туман, дождь, снег). Другим недостатком является необходимость выдачи точного целеуказания (предварительное наведение луча лазера на цель), при котором обеспечивается быстрое обнаружение и автоматическое сопровождение цели. В связи с этим лазерные визиры работают обычно совместно с радиолокационными.


