
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Командная система телеуправления первого вида (ТУ-1)Содержание книги
Поиск на нашем сайте
Систему телеуправления можно рассматривать как систему автоматического управления положением ЛА относительно некоторой расчетной траектории, определяемой методом наведения. Наведение осуществляется в двух взаимно перпендикулярных плоскостях. Рассмотрим формирование ошибки при наведении в вертикальной плоскости.
Отклонение ЛА от кинематической траектории можно определить путем сравнения угловых координат ЛА и расчетной траектории, определяемых для текущего момента времени
где Если учесть, что точность наведения ЛА на цель определяется тем минимальным расстоянием между центром масс цели и ЛА, которое может быть достигнуто в процессе наведения, то станет ясно, что за ошибку наведения, на основании которой формируется команда управления, следует принять линейное отклонение ЛА от расчетной траектории
Аналогично определяется ошибка в горизонтальной плоскости
Функциональная схема. Рассмотрим функциональную схему командной системы телеуправления первого вида в вертикальной плоскости (рис. 1.6). Наведение в горизонтальной плоскости осуществляется аналогично. Измерение координат цели и ЛА в общем случае осуществляется станцией наведения с некоторыми ошибками. Поэтому на рис. 1.6 обозначения В блоке формирования ошибки (БФО) наведения вычисляется линейное отклонение ЛА в вертикальной плоскости
Система стабилизации формирует электрический сигнал, который поступает на рулевой привод. Рулевой привод изменяет угловое положение рулей высоты. На рулевых поверхностях возникает дополнительная подъемная сила, которая вызывает вращение ЛА вокруг поперечной оси. Изменение углового положения ЛА приводит к изменению аэродинамических сил, действующих на ЛА, и как следствие, параметров движения ЛА. РЛС определяет координаты местоположения ЛА Локатор цели, локатор ЛА и командная радиолиния управления подвержены воздействию различных помех, что отображено на схеме возмущениями Структурная схема. Рассмотрим структурную схему командной системы телеуправления первого вид при наведении в вертикальной плоскости (рис. 1.7).
На рисунке введены следующие новые обозначения: КЗ - кинематическое звено, которое определяет связь между параметрами движения ЛА (скорость, координаты центра масс, угол тангажа, угол наклона траектории и др.), которые на рис. 1.7 обозначены в виде вектора РП - рулевой привод ЛА; СС - система стабилизации ЛА в вертикальной плоскости. На основе команды управления Ошибка наведения Рисунок 1.7 наглядно показывает, что система телеуправления является замкнутой автоматической системой, причем цель, а следовательно, и система измерения координат цели (локатор цели) не входят в замкнутый контур. Движение цели является внешним входным воздействием для контура наведения ЛА: возмущения
Для выбора параметров системы наведения, обеспечивающих устойчивость, требуемое качество и точность наведения, необходимо на основе структурной схемы составить математическую модель системы наведения, учитывающую принятый метод наведения, используемый набор измерительных средств, особенности управления ЛА, действующие возмущения и другие факторы. Составление математической модели системы наведения предполагает наличие математических моделей элементов, входящих в эту систему. Математические модели элементов системы телеуправления рассмотрены в следующей главе. Приведем примеры систем ТУ-1 Зенитный ракетный комплекс “Кроталь” (Франция) [20]. В состав зенитного ракетного комплекса (ЗРК) входит центр управления и до трех стрельбовых установок (рис.1.8). Центр управления представляет собой транспортер с импульсно-доплеровской РЛС обнаружения и опознования цели и аппаратурой управления огнем. Сообщается, что дальность обнаружения типовой цели составляет 18,5 км. РЛС снабжена специальной ЭВМ и может работать в режиме автосопровождения по 12 целям. Каждая стрельбовая установка предназначена для обстрела одной цели и управления двумя зенитными ракетами. Она размещается на одном транспортере и включает: РЛС слежения за целью, пусковую установку с четырьмя направляющими, радиопередатчик команд, Стартовая масса ракеты 85 кг, длина - 3м, диаметр - 0,16м, размах крыльев - 0,54м. РДТТ обеспечивает достижение ракетой скорости 800 м/с через 2,3 с. Дальность поражения целей 0,5 - 8,5 км. Время полета на максимальную дальность 19 с, к этому моменту скорость ракеты снижается до 300 м/с. Зенитный ракетный комплекс “ Роланд - 2 ”(ФРГ и Франция) [9]. Комплекс расположен на одном транспортере и включает: РЛС обнаружения и сопровождения цели, оптическую систему слежения за целью и инфракрасную систему слежения за ракетой. Кроме командной системы телеуправления первого вида используется система наведения по лазерному лучу. Комплекс высокомбильный, может вести автономную боевую работу, оснащен устройством автоматического заряжания пусковой установки, обеспечивающего скорострельность - 4 выстрела в минуту. Стартовая масса ракеты 66,5 кг, длина - 2,5м, диаметр - 0,16м, размах крыльев - 0,5м. Максимальная дальность перехвата целей - 6,3 км.
|
||||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 405; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.143.216.120 (0.011 с.) |

 Кинематическая траектория наведения определяется из решения системы дифференциальных уравнений (1.5). При расчете предполагается, что функции
Кинематическая траектория наведения определяется из решения системы дифференциальных уравнений (1.5). При расчете предполагается, что функции  заданы. Если скорость ЛА не задана, то к системе (1.5) нужно добавить дифференциальное уравнение, учитывающее изменение скорости.
заданы. Если скорость ЛА не задана, то к системе (1.5) нужно добавить дифференциальное уравнение, учитывающее изменение скорости. (1.6)
(1.6) - текущее значение угла места, а
- текущее значение угла места, а  - расчетное значение. Но при больших расстояниях ЛА от станции наведения даже небольшим угловым отклонениям ЛА от расчетной траектории могут соответствовать большие линейные отклонения (рис. 1.5).
- расчетное значение. Но при больших расстояниях ЛА от станции наведения даже небольшим угловым отклонениям ЛА от расчетной траектории могут соответствовать большие линейные отклонения (рис. 1.5).
 (1.7)
(1.7) (1.8)
(1.8) соответствуют действительным, а с индексом “и“ - измеренным значениям координат цели и ЛА.
соответствуют действительным, а с индексом “и“ - измеренным значениям координат цели и ЛА. и этот сигнал поступает на вход блока формирования команды (БФК) управления, с выхода которого команда управления
и этот сигнал поступает на вход блока формирования команды (БФК) управления, с выхода которого команда управления  поступает на вход командной радиолинии управления. Команда
поступает на вход командной радиолинии управления. Команда  по линии радиоуправления поступает на вход системы стабилизации ЛА в вертикальной плоскости.
по линии радиоуправления поступает на вход системы стабилизации ЛА в вертикальной плоскости. и измеренные величины
и измеренные величины  поступают в блок формирования ошибки наведения.
поступают в блок формирования ошибки наведения. . Возмущения, действующие на ЛА, показаны в виде возмущения
. Возмущения, действующие на ЛА, показаны в виде возмущения  .
.
 , и теми величинами, которые могут измерять станции наблюдения (в данном случае угол места
, и теми величинами, которые могут измерять станции наблюдения (в данном случае угол места  и наклонная дальность
и наклонная дальность  );
); , что приводит к изменению параметров движения ЛА (изменению вектора
, что приводит к изменению параметров движения ЛА (изменению вектора  учитывают воздействия различных помех на локатор цели, локатор ЛА, командную радиолинию и ЛА.
учитывают воздействия различных помех на локатор цели, локатор ЛА, командную радиолинию и ЛА.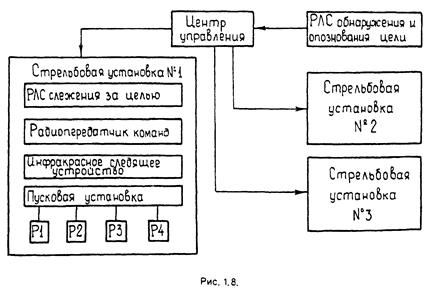 инфракрасное следящее устройство и вспомогательное оборудование.
инфракрасное следящее устройство и вспомогательное оборудование.


