Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Особенности эксплуатации и обслуживания якорно-швартовых и рулевых устройств.
Далее (ЯШУ, РЭУ). Классификация якорно-швартовных устройств. В зависимости от назначения и расположения тягового органа различают такие виды якорно-швартовных устройств: 1. брашпили; 2. якорно-швартовные лебедки; 3. шпили; 4. швартовные лебедки. Рабочий механизм якорно-швартовных устройств. В соответствии с Правилами Регистра, каждое судно должно иметь якорное устройство, рабочий механизм, которого состоит из 4-х узлов: 1. редуктора; 2. тормозных средств; 3. основного и вспомогательного грузовых барабанов; 4. муфт переключений; В качестве редукторов применяются двух-трехступенчатые цилиндрические или червячные редукторы с передаточным отношением i = 180…250 при значении КПД = 0,75…0,85. В качестве тормозных устройств применяют дисковые фрикционные тормоза, пристроенные непосредственно к электродвигателю, и ленточные тормоза, охватывающие тормозной шкив каждого основного (якорного) барабана. Основной (якорный) барабан предназначен для перемещения якоря, вспомогательный (швартовный) – для перемещения швартовных канатов. Муфты переключения предназначены для обеспечения механической связи между якорными барабанами и остальной частью электропривода ЯШУ. Количественные характеристики ЯШУ Число якорей зависит от водоизмещения судна и составляет 2..3. При этом на судах неограниченного района плавания якорей – 3, один из которых – запасной. Масса якорей зависит от водоизмещения судна: на судах водоизмещением 250……400 т. масса одного якоря составляет 300 кг, водоизмещением 70 000…100 000 т. – 11 000 кг. Суммарная длина обеих якорных цепей зависит от водоизмещения судна и составляет 110…770 м; например, для судна водоизмещением 2 000 т суммарная длина составляет 412,5 м, для судна с водоизмещением 20 000 т - 550 м; Якорная цепь состоит из отдельных смычек длиной 25….27,5 м каждая. Смычкой называется участок якорной цепи, состоящий из последовательно соединенных звеньев. В пределах каждой смычки звенья выполнены неразъемными Виды управления ЯШУ. На транспортных судах, занятых перевозкой грузов, применяются якорно-швартовные устройства при сравнительно ограниченном уровне автоматизации. Основным является ручное местное или дистанционное управление. Вместе с тем все чаще используются системы автоматического регулирования натяжения швартовных канатов, дистанционная отдача якоря.
Особенности работы электроприводов ЯШУ. Основными особенностями работы электроприводов ЯШУ являются: 1. кратковременный режим работы длительностью 30 мин. с номинальным тяговым усилием на цепной звёздочке; 2. изменение нагрузки на валу в пределах 30...200% номинального тягового усилия; 3. возможность стоянки под током в заторможенном состоянии в течение 30 с – для якорных механизмов и 15 с – для швартовных механизмов; 4. частые пуски и остановки электропривода (до 60 циклов “включено-выключено “ в течение 30 минут).
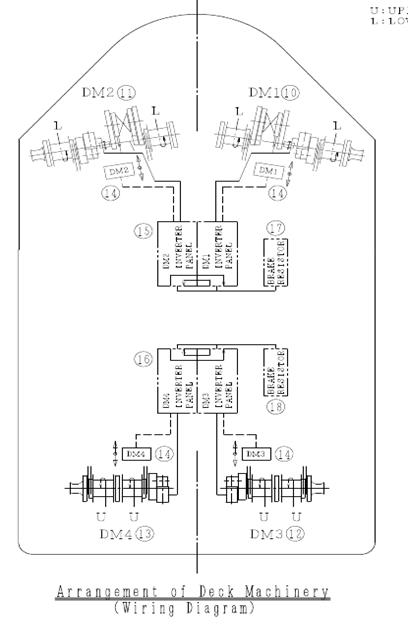
Схема расположения якорно-швартовного оборудования. Обозначения: DM 10, 11, 12, 13, 14 – палубные механизмы (ЯШУ). 15, 16 панели инверторного управления. 17, 18 блоки тормозных сопротивлений.
Требования Правил Регистра к якорным и швартовным электроприводам 1.Мощность электропривода якорного механизма должна обеспечивать номинальное тяговое усилие на звёздочке (Н) F где: р – масса одного метра цепи, кг; h – глубина стоянки на якоре, м; Q - масса одного якоря, кг; 2. Указанную мощность электродвигатель якорного механизма должен развивать в течение 30 мин непрерывной работы с последующей стоянкой под током в течение 30 с; 3. Скорость выбирания якорной цепи при номинальном тяговом усилии на звёздочке F 4. Пусковой момент электродвигателя должен обеспечить двойное значение номинального тягового усилия на звёздочке 2 F 5. Если пусковой момент электродвигателя создаёт усилие, превышающее номинальное тяговое усилие в 4 раза, между электродвигателем и механизмом должна устанавливаться предохранительная фрикционная муфта; 6. Тормоз механизма должен развивать момент, препятствующий развороту механизма при тяговом усилии на звёздочке не менее 1,3 F 7. Электропривод якорно-швартовного механизма должен обеспечивать одновременное выбирание двух свободно висящих якорей с половины номинальной глубины стоянки;
8. при подходе якоря к клюзу электропривод должен развивать скорость не более 0,17 м/с (10,2 м/мин); предпочтительной является скорость 0,12 м/с (7,2 м/мин); 9. на ступенях скоростей, предназначенных только для швартовных операций, должна быть предусмотрена защита от перегрузки, при срабатывании которой электродвигатель переходит на ступень, предназначенную для подъёма якоря; 10. привод якорного устройства должен обеспечивать непрерывную работу с номинальном тяговым усилием в течение 30 мин, а затем, без перерыва, стоянку под током в заторможенном состоянии в течение 30 с – для якорных механизмов и 15 с – для швартовных механизмов; 11. при этом допускается превышение температуры на 30% по отношению к предельной температуре обмоток, определённых классом изоляции обмоток (электрические машины морского исполнения выпускают с изоляцией обмоток классов В - 130°С, F - 155°С и Н - 180°С); 12. при стоянке под током асинхронные двигатели с фазным ротором и двигатели постоянного тока должны развивать момент стоянки не менее двойного номинального момента; 13. питание электроприводов якорно-швартовных механизмов должно производиться непосредственно от ГРЩ.
Техническое обслуживание. Подготовка к действию брашпилей и шпилей. При подготовке к действию брашпиля (шпиля) боцман или лицо его заменяющее, должны: 1. убедиться в отключении ручного привода; 2. проверить положение ленточного тормоза и, если нужно, затянуть его; 3. проверить действие кулачковой (фрикционной) муфты; 4. проверить чистоту якорной цепи на участке от механизма до клюза и правильность ее положения на цепном барабане; 5. подготовить к действию привод брашпиля (шпиля); при паровом приводе прогреть паропровод и паровую машину; 6. при отключенном цепном барабане провернуть брашпиль (шпиль) вхолостую в обе стороны на несколько оборотов, наблюдая за показаниями амперметра; 7. при наличии дистанционного управления проверить действий исполнительных механизмов при управлении со всех постов; 8. доложить на мостик о готовности брашпиля (шпиля) к действию. При отдаче якоря без включения двигателя брашпиля необходимо: 1. зажать ленточный тормоз и выключить цепной барабан; 2. отжать ленточный тормоз и произвести травление якоря; для уменьшения скорости травления зажимать ленточный тормоз плавно и без рывков; 3. после вытравливания заданного числа смычек якорной цепи зажать полностью ленточный тормоз. Для подъема якоря необходимо: 1. включить муфту, сообщающую цепной барабан с валом; 2. ослабить ленточный тормоз и одновременно пустить двигатель брашпиля; 3. обмывать водой цепь при подъеме; 4. вести наблюдение за состоянием якорной цепи и положением якоря при подходе клюзу, при этом скорость подъема должна быть снижена; 5. после подъема якоря затянуть ленточный тормоз до отказа; 6. взять якорную цепь на стопор; 7. передать нагрузку с ленточного тормоза на стопор, для чего ослабить тормоз и снова затянуть его; 8. отключить цепной барабан. При включенном приводе брашпиля (шпиля) следить, чтобы колодки и ленты тормозов были достаточно отжаты и не препятствовали работе двигателя. При работе электрического привода брашпиля (шпиля) следить за показаниями амперметра, не допуская увеличения силы тока свыше номинального значения.
Муфты предельного момента должны быть всегда исправны и отрегулированы. Во время травления якорной цепи или работы на турачку необходимо находиться в стороне от линии движения якорной цепи или швартовного троса и не прикасаться к движущимся частям. Запрещается оставлять на турачках закрепленные тросы, а также использовать стопоры для удержания якорной цепи при стоянке на якоре. Назначение этих стопоров – крепление втянутых якорей по-походному. Необходимо следить за смазкой механизма брашпиля (шпиля), проверяя ее состояние в каждом случае подготовки к работе. Открытые передачи брашпиля должны быть постоянно покрыты смазкой рекомендованного состава и закрыты защитными кожухами. Не допускается работа брашпиля с таким износом цепных барабанов, при котором наблюдается проскальзывание якорной цепи. При выводе из действия брашпиля с паровым приводом должны быть обеспечены продувание цилиндров и паропровода и освобождение их от конденсата во избежание гидравлических ударов при последующих пусках и возможного размораживания машины и трубопроводов в зимний период. Регулировка дисковых тормозов. Регулировка занимает значительное время в обслуживании привода. Она должна осуществляться весьма тщательно и добротно. Некачественная работа тормоза может привести к тяжелым последствиям. Действие тормозов и тормозных магнитов проверяется путем пробных пусков и торможений исполнительного двигателя обязательно каждый раз при подходе к месту швартовки или якорной стоянки. Техническое обслуживание электрических тормозов с полной разборкой производится раз в год, а с частичной разборкой - не реже одного раза в три месяца. Работа путевых выключателей, которые могут быть на тормозе, проверяется не менее трех раз в промежутках между плановыми ТО.
9.4 Электроприводы рулевых устройств. Общая характеристика рулевых электроприводов. Управляемость является одним из важнейших качеств современного судна. Она может быть обеспечена различными способами и средствами: 1. кормовыми рулями; 2. гребными винтами; 3. водометными движителями; 4. крыльчатыми движителями; 5. подруливающими устройствами. Нередки случаи совместного использования некоторых из названных устройств. На морских транспортных судах основным средством обеспечения активного маневрирования объекта являются кормовые рули, перекладка которых осуществляется посредством электропривода. Маневренные качества объекта, включающего в себя комплекс: корпус - руль - винты могут быть полностью реализованы только при надлежащей работе привода руля и системы управления.
Рулевой электропривод является наиболее ответственным электроприводом на судне. От его безотказного и качественного действия зависит безопасность мореплавания, сохранность судна, экипажа и груза. Это обстоятельство определяет необходимость наиболее жестких требований к рабочим характеристикам привода как при проектировании и комплектации, так и в регламентных мероприятиях по поддержанию сохранности этих характеристик в процессе эксплуатации. Классификация рулевых электроприводов. Используемые на транспортных судах рулевые электроприводы отличаются большим многообразием. Это связано с конструктивными особенностями рабочего органа, режимом работы основного электрооборудования, видом механических связей между исполнительным электродвигателем и рулем, степенью автоматизации управления и т. д. Ниже приводится разделение рулевых электроприводов по группам в соответствии со следующими основными признаками: 1. По гидродинамическим особенностям руля. Руль определяет не только управляемость судна, но и нагрузку рулевого электропривода, и возможные режимы его работы. На морских транспортных судах в качестве кормовых рулей в настоящее время чаще используются обыкновенные рули, которые разделяются по таким признакам: а) по форме пера и степени компенсации: ü простые; ü балансирные; ü полубалансирные. б) по профилю руля: ü пластинчатые; ü удобообтекаемые (профильные). Профильность руля сравнительно мало влияет на нагрузочные характеристики привода, но является важным элементом, улучшающим ходкость судна, уменьшая общее сопротивление его движению. Компенсация руля используется для общего уменьшения момента на баллере, что облегчает условия работы рулевого электропривода. Вместе с тем при компенсированном руле ограничивается количество точек закрепления пера руля, что снижает прочность и надежность рулевого комплекса. Поэтому на судах ледового плавания, ледоколах стремятся применять простые рули, ось вращения которых проходит по передней кромке, что обеспечивает возможность увеличения числа подшипников на рудерпосте для создания наиболее прочного подвижного сочленения. 2. По типу механической передачи между рабочим органом и рулевым исполнительным двигателем (ИД). Вид передаточного механизма определяет характер работы рулевого ИД, степень его энергетического использования и особенности электрифицированной системы управления. Рулевые электромеханические (РЭМ) приводы - секторные, редукторные. В них рулевой ИД жестко через кинематический механизм связан с баллером руля. Управление перекладкой производится непосредственным включением и отключением двигателя, характер работы которого прерывистый. Регулирование перекладки производится посредством изменения частоты вращения рулевого ИД.
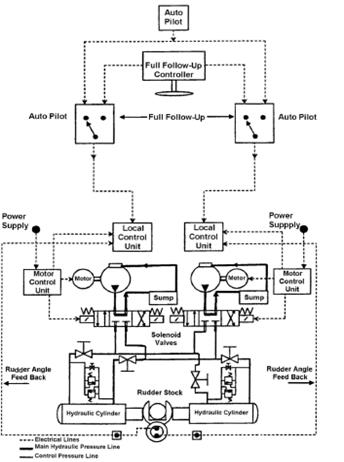
Рулевые электрогидравлические (РЭГ) приводы. В них рулевой ИД непрерывно вращает насос, от которого при необходимости перекладки происходит управляемая подача рабочей жидкости на гидравлическую рулевую машину. В настоящее время используются рулевые машины плунжерные, лопастные, с качающимися цилиндрами. В зависимости от принятого принципа регулирования подачи масла на рулевую машину (объемного или дроссельного) применяются насосы переменной или постоянной подачи. Для более мощных систем характерен объемный принцип регулирования, осуществляемый посредством специального электрического или электромеханического сервопривода. В кинематике сервопривода для целей эффективности регулирования подачи масла насосом применяются: рычажные, кулачковые и электрические дифференциалы. При дроссельном регулировании подача масла происходит включением золотника с ручным или электромагнитным приводом. Таким образом, в РЭГ- приводах регулирование перекладки руля происходит на гидравлической стороне механизма передачи при постоянном вращении вала исполнительного электродвигателя. В качестве последних применяются наиболее простые и дешевые асинхронные машины с короткозамкнутым ротором. Управление ими заключается только в дистанционном пуске при изготовке рулевого, приводя к действию. 3. По степени автоматизации управления рулевые электроприводы разделяются на приводы: a) простого; б) следящего; в) автоматического действия. Простое действие или управление по времени. При простом управления в качестве органов управления используют кнопки «Лево руля», «Право руля» или вертикально расположенный рычаг управления. Руль перекладывается все то время, пока нажата одна из кнопок или рычаг выведен из нейтрального положения (наклонен в нужную сторону). Перекладка прекращается, если отпустить кнопку или вернуть рукоятку поста в исходное - нулевое положение. Отсюда название – управление по времени. Об угловом состоянии руля в каждый момент времени судят по рулевому указателю - аксиометру. Таким образом, простое управление является неавтоматизированным. Следящее действие или управление по пути. При следящем управления, в качестве органа управлении используют штурвал поста управления в рулевой рубке. При повороте штурвала на определенный угол в необходимую сторону (влево или вправо относительно нулевого положения) перо руля повернется на такой же (или пропорциональный) угол и автоматически остановится. Иначе говоря, перо руля повторяет поворот штурвала, как бы следит за движением штурвала, отсюда название – следящее управление. При этом угол поворота пера руля тем больше, чем больше угловое расстояние (путь), описанное штурвалом, отсюда второе название – управление по пути. Из сказанного следует, что каждому положению штурвала после отработки соответствует определенное положение руля. Таким образом, следящее управление является полуавтоматическим – на первом этапе управления участвует человек (поворачивает вручную штурвал) на втором - используются элементы автоматики (сельсин-датчик руля в румпельном отделении), обеспечивающие автоматическую (без участия человека) остановку руля. Аксиометр является средством дополнительного контроля положения руля. Автоматическое действие. Рулевой привод обеспечивает выполнение заданной программы перемещения судна. В частном, наиболее простом случае, решается задача стабилизации судна на прямом курсе. В качестве органов управления используются элементы автоматики: сельсины-трансформаторы (поста управления в рулевой рубке, пера руля в румпельном отделении, насоса Холла в исполнительном механизме), тахогенераторы и др. 4. По роду тока в системе питания, ИД и схемы управления. Принципиально рулевые электроприводы могут комплектоваться для работы как от сети переменного, так и от сети постоянного тока. В рулевых электромеханических приводах (РЭМ - приводах или секторных) широко используется система генератор - двигатель. При формировании управляющего сигнала в автоматическом и следящем режимах в современных схемах предпочтительнее применяются элементы переменного тока (сельсины-трансформаторы, магнитные усилители, программируемые логические контроллеры). Аварийное управление применяют тогда, когда остальные виды управления – простое, следящее и автоматическое, отказали. Аварийное управление осуществляется непосредственно из румпельного отделения, после соответствующих переключений, согласно инструкции конкретных РЭП.
Требования Конвенции SOLAS -74 и Правил Регистра к РЭП.
Основные определения. 1. Главный и вспомогательный рулевые приводы. Главным называется привод, предназначенный для управления судном в нормальных условиях эксплуатации. Вспомогательным называется привод, предназначенный для управления судном в случае выхода из строя главного рулевого привода. 2. Силовой агрегат рулевого привода Силовым агрегатом рулевого привода называют механизмы, предназначенные для создания энергии, необходимой для поворота руля. Силовым агрегатом электрического (секторного) рулевого привода является электродвигатель с относящимся к нему электрооборудованием. Силовым агрегатом э лектрогидравлического рулевого привода является электродвигатель с относящимся к нему электрооборудованием и соединённым с ним насосом. 3. Система управления Системой управления называют устройство,предназначенное для передачи команд с ходового мостика к силовым агрегатам рулевого привода. Системы управления рулевым приводом включают: а) датчики и приёмники положения пера руля; б) электродвигатели с насосами; в) органы управления электродвигателями (кнопки, штурвал, авторулевой); г) кабели и трубопроводы. Основные требования к рулевым электроприводам. 1. Повреждение любого рулевого привода – главного или вспомогательного, не должно выводить из строя другой; 2. Конструкция рулевых приводов должна обеспечивать переход при аварии с главного рулевого привода на вспомогательный за время не более 2 минут; 3. Рулевые приводы должны обеспечить непрерывную работу РЭП в наиболее тяжёлых условиях эксплуатации (при частой смене курса, при движении в битом льде, в штормовых условиях); 4. Конструкция рулевого привода должна исключать возможность его повреждения при работе судна на максимальной скорости заднего хода; 5. Главный электрический или электрогидравлический рулевой привод, состоящий из одного или более силовых агрегатов, должен получать питание по двум отдельным фидерам, проложенным непосредственно от главного распределительного щита разными трассами. Фидеры должны прокладываться разными трассами, по возможности на максимальном расстоянии друг от друга в горизонтальном и вертикальном направлении; 6. В случае применения в главном распределительном щите секционированных сборных шин питание каждого фидера должно осуществляться от разных секций. Один из фидеров может получать питание через аварийный распределительный щит. 7. Если рулевое устройство имеет вспомагательный электрический или электрогидравлический привод допускается его питание осуществлять от фидеров главного электропривода. Каждый фидер должен быть рассчитан на питание всех электрических двигателей, которые нормально присоединены к нему и работают одновременно. 8. Если предусматривается переключающее устройство, позволяющее подавать питание на любой электрический двигатель или на сочетание их от одного или другого фидера, такие фидеры должны быть рассчитаны на наиболее тяжелые условия нагрузки, а переключающее устройство должно устанавливаться в румпельном помещении. 9. При неисправности работающего силового агрегата рулевого привода другой агрегат должен приводиться в действие автоматически или вручную с поста, расположенного на ходовом мостике. 10. На всех судах, имеющих рулевые устройства, при выходе из строя основного источника питания силовой установки рулевого привода должно быть обеспечено автоматическое подключение питания в течение 45 с от аварийного источника электрической энергии или от другого независимого источника, установленного в румпельном помещении и предназначенное только для этой цели. 11. Для судов валовой вместимостью 10000 рег. т и более мощность этого источника должна обеспечивать непрерывное питание рулевого привода, а также связанной с ним системы дистанционного управления и указателей положения пера руля в течение не менее 30 мин, а для всех других судов - в течение не менее 10 мин. 12. Режим работы электрических двигателей приводов средств активного управления судном (подруливающие устройства) должен соответствовать предусмотренным условиям работы всего устройства, но, по крайней мере, двигатели должны отвечать кратковременному режиму работы в течение не менее 30 мин. 13. Электрический и электрогидравлический привод рулевого устройства должен обеспечивать: а) перекладку руля (поворотной насадки) с 35° одного борта на 30° другого борта за время 28 с при действии расчетного момента рулевого привода на руль; б) непрерывную перекладку руля с борта на борт в течение 30 мин для каждого агрегата при полностью погруженном руле и максимальной скорости переднего хода, соответствующей этой осадке; в) непрерывную работу в течение 1 ч при наибольшей эксплуатационной скорости переднего хода и при перекладке руля на угол, обеспечивающий 350 перекладок в час; г) возможность стоянки электрического двигателя под током в течение 1 мин с нагретого состояния (только для рулей с непосредственным электрическим приводом); д) надлежащую прочность электрического привода при усилиях, возникающих при максимальной скорости заднего хода судна; е) мощность вспомогательных рулевых приводов должна обеспечивать перекладку пера руля (поворотной насадки) с 15° одного на 15° другого борта за время не более 60 с. ж) двигатели рулевых приводов должны допускать перегрузку по моменту не менее 1,5 момента, соответствующего расчетному, в течение одной минуты. 14. Рекомендуется, чтобы была обеспечена возможность перекладки руля при средней скорости заднего хода. 15. Пуск и остановка электрических двигателей привода руля, кроме электрических двигателей рулей с непосредственным электрическим приводом, должны осуществляться из румпельного помещения и из рулевой рубки. 16. Пусковые устройства должны обеспечивать повторный автоматический запуск электрических двигателей при восстановлении напряжения после перерыва в подаче питания. 17. В рулевой рубке и у поста управления главными механизмами должна быть предусмотрена световая и звуковая сигнализация: а) об исчезновении напряжения, обрыве фазы и перегрузке в цепи питания каждого силового агрегата; б) об исчезновении напряжения в цепи питания системы управления; в) о минимальном уровне масла в любой из цистерн гидравлической системы. Кроме того, должна быть предусмотрена индикация о работе электродвигателей силовых агрегатоврулевого привода. 18. Системы управления электроприводами рулевого устройства должны получать питание от силовой цепи рулевого привода в румпельном помещении или непосредственно от шин распределительного устройства, питающего эту силовую цепь. 19. В румпельном помещении должны быть предусмотрены средства отключения любой системы управления с мостика от рулевого привода, который она обслуживает. 20. Каждая система дистанционного управления должна иметь собственную независимую цепь передачи сигналов управления исполнительному механизму рулевого привода. 21. Направление вращения штурвала или движения рукоятки управляющего аппарата должно соответствовать направлению перекладки пера руля. 22. В системе кнопочного (простого) управления кнопки должны быть расположены таким образом, чтобы включение кнопки, находящейся с правой стороны, обеспечивало движение пера руля вправо, а находящейся с левой стороны - движение его влево. 23. К установке допускаются авторулевые, воздействующие на рулевую машину посредством собственной системы передачи или использующие для этого штатную ручную систему управления рулевым приводом, а также адаптивные авторулевые. 9.6 Основные требования к авторулевым. Автоматическим рулевым (авторулевым) называют прибор, предназначенный для автоматического управления рулевым приводом с целью удержания судна на заданном курсе. Авторулевые относятся к оборудованию судов, на которое распространяются требования Международной конвенции по охране человеческой жизни на море (SOLAS-74). К основным требованиям относятся следующие: 1. авторулевой должен удерживать судно на курсе: ü с точностью ±1º при скорости не менее 6 узлов; ü при амплитуде рыскания не более 1º при состоянии моря до 3 баллов и 4º - до 5 баллов; 2. авторулевой должен иметь устройство, прекращающее кладку пера руля при 35º на каждый борт; 3. должна быть световая сигнализация о наличии питания в схеме; 4. должна быть световая сигнализация об используемом виде управления; 5. должна быть световая и звуковая сигнализация о перегрузке рулевого привода; 6. рекомендуется иметь звуковую сигнализацию о недопустимых отклонениях от заданного курса при автоматическом управлении; 7. система управления авторулевым должна быть самосинхронизирующейся, т.е. исключать дополнительные действия при переходе с одного вида управления на другой; 8. на пульте авторулевого должно быть простое и надёжно действующее устройство для ручного управления рулём в виде штурвала или кнопочного поста управления с кнопками «Лево», «Право»; 9. переход с автоматического управления на ручное должен осуществляться одной манипуляцией в течение не более 3 с при любом положении руля; 10. в авторулевых рекомендуется иметь устройство, которое при автоматическом управлении позволяет изменять курс по крайней мере на ±10º без перехода на ручное управление; 11. в авторулевых рекомендуется иметь 2 выносных поста управления, позволяющих при автоматическом управлении выполнить экстренный поворот на любой угол, вплоть до полной циркуляции; 12. пульт автоматического и ручного управления должен находиться в диаметральной плоскости судна, чтобы исключить его влияние на магнитный компас; 13. выносные пульты управления должны находиться на крыльях мостика или в других местах, удобных для немедленного перехода на управление с этих постов. Системы управления рулевыми электроприводами. Основные сведения. Ниже рассматриваются три характерных системы управления рулевыми электроприводами: 1. простого управления, при помощи кнопок «Лево руля», «Право руля»; 2. следящего управления, при помощи штурвала; 3.автоматического управления; Правила технической эксплуатации РЭП. Основные положения. Перед выходом судна в море необходимо выполнить следующее: 1. убедиться в исправном состоянии РЭП; 2. проверить внешним осмотром исправность указателей и ограничителей перекладки; 3. измерить сопротивление изоляции электрооборудования; 4. включить РЭП и опробовать его в действии путем перекладки руля с бора на борт. При этом необходимо проверить исправность работы электрических машин, релейно-контакторной аппаратуры, ограничителей перекладки руля, рулевых указателей, звуковой и световой сигнализации. Все неисправности, замеченные при проверке РЭП, ВРШ, РГП подлежат немедленному исправлению. Во время хода судна не реже одного раза в сутки проверка РЭП должна производиться ответственным персоналом МО. В сложных условиях плавания резервное электрооборудование РЭП должно быть готово к немедленному вводу в действие. Замена работающих механизмов РЭП резервными может производиться только по согласованию с вахтенным помощником. При вводе резервного РЭП в действие сначала нужно включить его, а затем остановить работающий. Рекомендуется периодически переключать работающий и резервный РЭП. Перед отключением РЭП руль должен быть установлен в диаметральную плоскость судна. Во всех режимах плавания, включая сложные, необходимое число используемых РЭП определяется капитаном. Авторулевой. Перед выходом в рейс необходимо подготовить к действию авторулевой одновременно с подготовкой к действию РЭП. До начала проверки авторулевого помощником капитана должна быть выполнена проверка соответствия репитера-датчика авторулевого показаниям основного прибора гирокомпаса. При подготовке авторулевого к действию необходимо: а) осмотреть аппаратуру авторулевого; б) измерять сопротивление изоляции; в) произвести проверку работы авторулевого со всех постов управления в соответствии с инструкциями по эксплуатации при поочередной и совместной (где это допускается инструкцией) работе РЭП. При переводе авторулевого с одного вида управления на другой, как правило, необходимо чтобы судно было на заданном курсе, а руль в диаметральной плоскости. Коэффициент обратной связи и величина сигнала производной отклонения курса подбираются вахтенным помощником в зависимости от водоизмещения судна, скорости хода и состояния моря в соответствии с инструкциями по эксплуатации так, чтобы рыскание судна было наименьшим при минимальном числе перекладок руля. При увеличении волнения моря для снижения нагрузок на РЭП, уменьшения числа и длительности перекладок рекомендуется увеличивать значение КОС и уменьшать сигнал производной. При длительном использовании авторулевого, а также при подходе судна к районам со сложными условиями плавания вахтенному помощнику необходимо проверять исправность действия РЭП в режиме управления “простой” и “следящий”. При выполнении ТО технического обслуживания авторулевого необходимо: а) произвести внешний осмотр аппаратуры; б) установить переключатель видов управления в положение “автомат”; в) произвести проверку работы авторулевого со всех постов управления в соответствии с инструкцией по эксплуатации при поочередно включаемых РЭП; г) убедиться в отсутствии автоколебаний в системе авторулевого и принять возможные меры по их устранению, руководствуясь инструкцией по эксплуатации
Схематическая диаграмма рулевого электро-гидравлического привода (РЭГП).
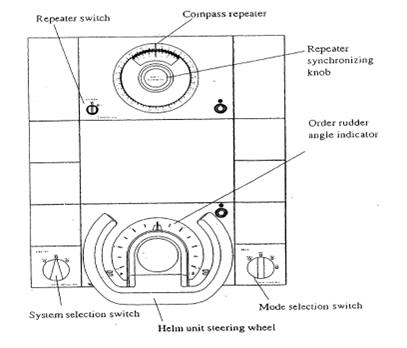
Лицевая часть колонки авторулевого.
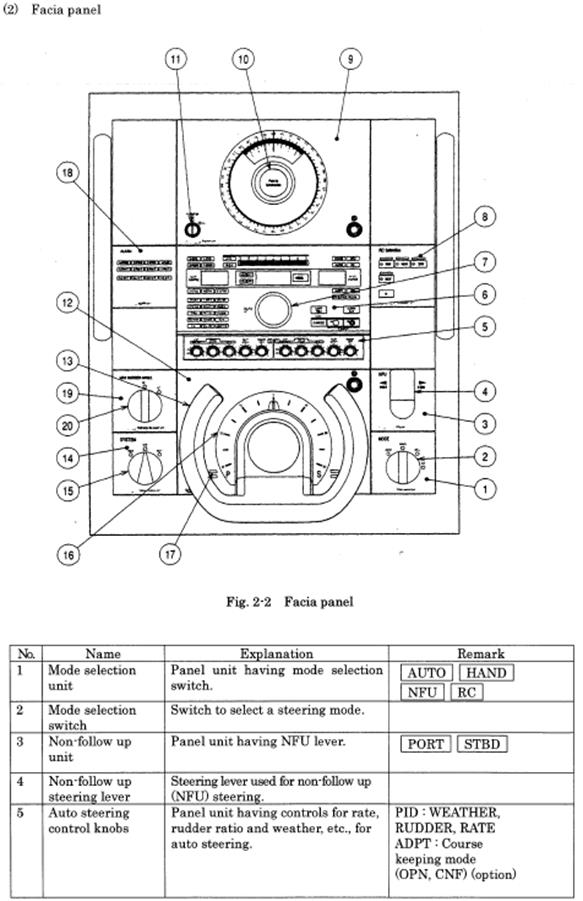
Описание элементов лицевой части авторулевого PR – 6000. (в таблице п.1- п.5)
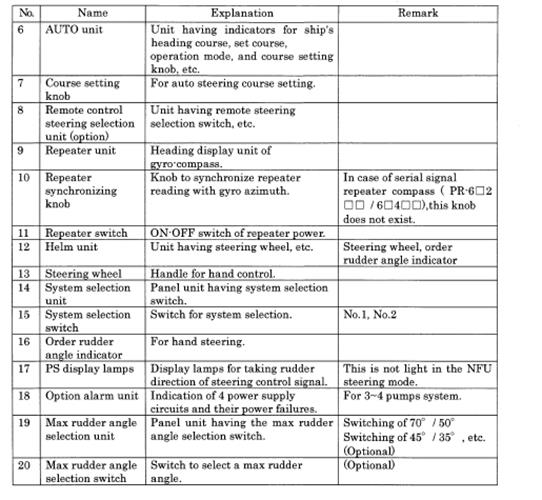
Описание элементов лицевой панели авторулевого PR – 6000. (п.6 – п.20)
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 848; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.93.210 (0.19 с.) |
 = 11 (рh + Q),
= 11 (рh + Q),