Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Пропорциональные гидросистемы современныхСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
МОБИЛЬНЫХ МАШИН
2.1. Гидросистемы с пропорциональным управлением
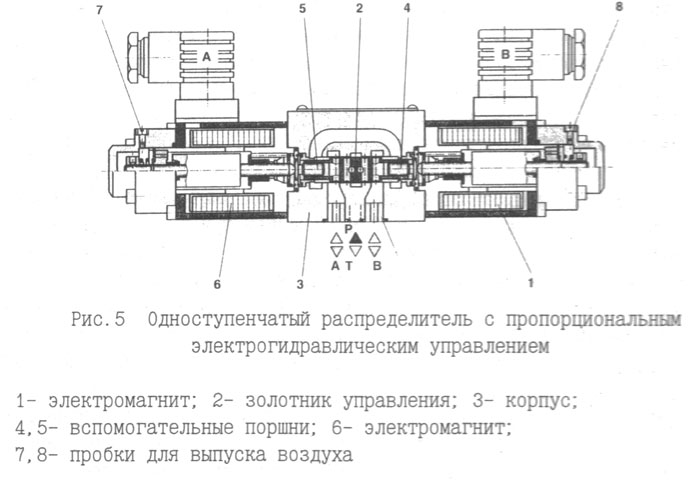
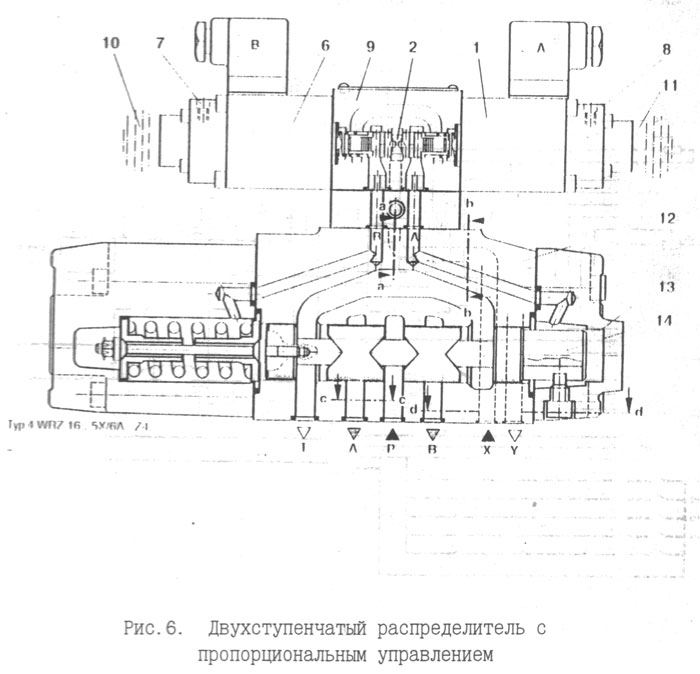
Пропорциональное (аналоговое) управление (при котором расход или давление рабочей жидкости гидроаппарата соответствует положению органа управления (рис.4) или величине входного сигнала) позволяет оптимизировать режимы работы гидроприводов. Точное управление величиной расхода рабочей жидкости и, следовательно, скоростью движения исполнительного механизма (шток гидроцилиндра или вал гидромотора), создает возможности для повышения эффективности работы машин, повышает качество выполнения технологического процесса, улучшает условия труда оператора, повышает надежность гидросистемы. Например, обеспечение необходимой величины расхода рабочей жидкости к гидроцилиндрам при выполнении планировочных работ бульдозерным агрегатом за счет точного управления его положением позволяет более качественно обработать поверхность грунта, а меньшее количество переключений распределителя повышает производительность труда и снижает утомляемость оператора. Более того, с уменьшением количества включений распределителя уменьшается и количество импульсов давления в гидросистеме, что снижает ее нагруженность и тем самым способствует повышению ресурса работы. Пропорциональное управление в гидросистемах лесопромышленных тракторов облегчает наводку захвата манипулятора на дерево, что безусловно облегчает работу тракториста и повышает производительность труда. На сельскохозяйственных тракторах применение пропорционального управления расходом рабочей жидкости решающим образом влияет на качество выполнения технологического процесса и на эффективность работы машинно-тракторных агрегатов. Возможность подачи к исполнительным механизмам минимально необходимых расходов рабочей жидкости позволяет существенно улучшить энергетические характеристики гидроприводов. Пропорциональное управление величиной давления необходимо, например, в механизмах срезания деревьев лесными тракторами для регулирования усилия подачи пилы. Дистанционное пропорциональное управление создает дополнительные преимущества - позволяет устанавливать гидроаппаратуру вне кабины, упрощает герметизацию последней, снижает уровень шума в ней, улучшает температурные условия. Возможность установки при дистанционном управлении гидроаппаратуры непосредственно у исполнительных механизмов (гидродвигателей) позволяет сократить количество гидролиний за счет подвода рабочей жидкости на основной части пути только по двум гидролиниям (напорной и сливной) и разветвлением их только у гидродвигателей. Электрогидравлическое исполнение дистанционного управления позволяет значительно улучшить возможности пропорциональной гидроаппаратуры. В этом случае создаются предпосылки для автоматизации режимов работы гидроприводов и их оптимизации на основе применения бортовых компьютеров, электронных блоков и датчиков контроля работы основных элементов привода. Впервые электрогидравлические системы пропорционального управления были разработаны для авиационной техники на основе сервоклапанов (электрогидравлических усилителей). Следящие аналоговые системы управления широко используются в промышленных роботах. Данные системы управления снабжены датчиками обратной связи, с помощью которых значение регулируемого параметра сравнивается с задающим воздействием, а процесс автоматического регулирования направлен на устранение сигнала рассогласования. При этом обычно используют дросселирующие гидрораспределители, гидрораспределители с пропорциональным управлением, гидроклапаны с пропорциональным управлением с точностью позиционирования для роботов грузоподъемностью до 15 кг ± 0,5...1 мм, с грузоподъемностью до 50 кг - ± 2 мм. Сервоклапаны обладают неплохими динамическими свойствами, но весьма чувствительны к загрязнениям при высокой стоимости и сравнительно низкой экономичности. Поэтому в последние годы в качестве альтернативного варианта активно внедряются пропорциональные распределители, которые начали разрабатываться для гражданского машиностроения на базе традиционных распределителей релейного действия. При этом учитывались следующие требования: минимальные потери давления и величина давления управления, надежность, удобство обслуживания, возможность аварийного ручного управления. Наиболее широко распространенной конструкцией пропорциональных распределителей является комплекс пилотного распределителя с двумя регулируемыми электромагнитами постоянного тока (первый управляющий каскад), основного распределителя с центрированный пружинами золотником и встроенного (при необходимости контроля положения золотника) датчиком перемещения. При необходимости управления положением основного золотника в режиме позиционного регулирования в распределители встраиваются электронные приборы для обеспечения обратной связи. Основной золотник может иметь положительное перекрытие и дросселирующие пазы треугольного сечения, благодаря чему достигаются небольшие утечки и оптимальный характер увеличения проходного сечения в зоне незначительного перемещения золотника. При аварийном обесточивании золотник автоматически возвращается, в исходную (нейтральную) позицию за счет центрирующих пружин. Распределитель позволяет обеспечивать ручное (аварийное) переключение непосредственным воздействием на якори электромагнитов. Для гидросистем мобильных машин относительно низкая стоимость пропорциональных распределителей, их меньшая чувствительность к загрязнениям и большая экономичность делают их применение перспективным На рис.5,6 приведены конструктивные схемы электрогидравлических распределителей, выпускаемых фирмой Rexroth.
На рис. 6 показана конструкция двухступенчатого распределителя теля с пропорциональным управлением, в котором имеются: 9- корпус первого каскада; 10,11- кнопки ручного управления; 12- корпус второго каскада; 13- камера управления; 14- основной золотник.
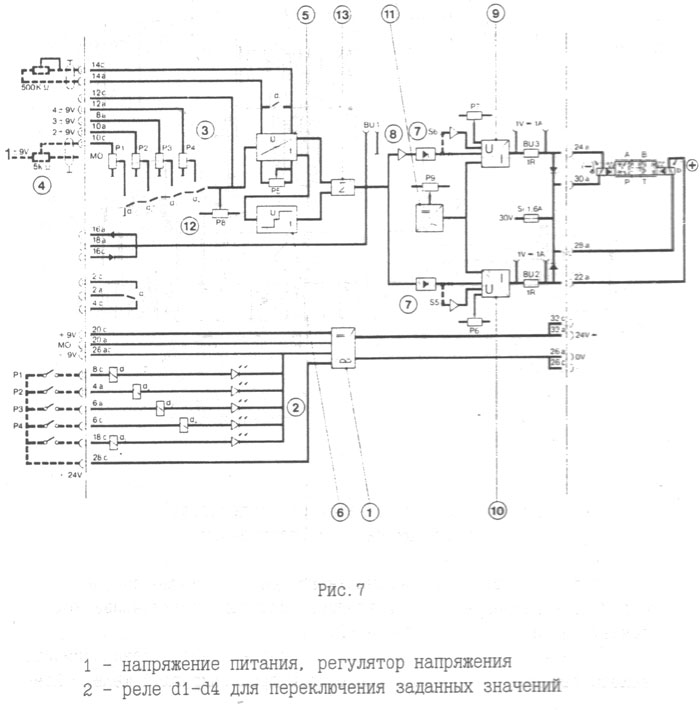
Распределители пропорционального действия можно дополнительно оснащать компенсатором давления, который устанавливается в промежуточной плите под клапаном. С помощью компенсатора давления обеспечивается независимость расхода течения от перепада давления в дросселирующей щели. Компенсатор давления может быть установлен в подводящей магистрали в двух- или трехходовом конструктивном исполнении для регулирования потока. Возможно также применение одного компенсатора давления для нескольких клапанов пропорционального управления. В этом случае компенсатор давления устанавливается в общей для всех клапанов присоединительной плите. Управление распределителей пропорционального управления осуществляется, как правило, с помощью усилителя тока. В электроусилителе (Rexroth) имеются (рис. 7):
3 -подстроенные конденсаторы для внутреннего регулирования заданного значения 4 - внешний датчик 5 - преобразователь линейной функции (0,1...О,5 сек), усиление сигнала на входе регулируется с помощью преобразователя линейной функции 6 - функциональный преобразователь 7 - диоды для управления направлением тока. Верхний диод пропускает плюсовое напряжение, а нижний диод - минусовое напряжение 8 - инвертирующий каскад для выпрямления сигнала (плюсовое напряжение преобразуется з минусовое) 9 - регулирование на постоянную величину тока магнита а (генератор для неизменной величины тока) 10 - регулирование на постоянную величину тока магнита b генератор для неизменной величины тока) 11 - генератор для улучшения гистерезиса Р 7 электрического тока возбуждения 12 - Р 5 подстроенный компенсатор нулевого значения и коррекции расхождений отдельных блоков. Установка нулевого значения (нулевой точки) производится на заводе. 13 - суммирующее устройство для сложения величин, получаемых от преобразователя линейной функции и функционального преобразователя
2.2. Пропорциональные гидроклапаны
Введение
В последние годы большинство промышленных гидравлических систем имели электромагнитное управление, но регулировались вручную. Другими словами, пуск, остановка и управление направлением движения выходных звеньев гидродвигателей управлялись электромагнитными клапанами, но регулирование расхода жидкости и величины давления осуществлялось ручным способом. Во многих случаях так продолжалось до сих пор и это вполне удовлетворяет требованиям эксплуатации. Однако при более сложных условиях эксплуатации при этом способе регулирования возникает ряд недостатков, например, когда в системе возникают разные уровни расходов рабочей жидкости и величины давления. Это может привести к применению множества регулирующих и переключающих клапанов и не всегда к плавному переходу из одного состояния в другое. Для обеспечения ускорения и замедления регулирования скорости выходного звена гидродвигателя требуется применение дополнительных клапанов в системе, что приводит к увеличению ее стоимости и усложнению конструкции. Когда требовалось обеспечить высокую степень регулирования скорости выходного звена и точное позиционное управление, только сервоклапаны позволяли реализовать данную задачу, применяя в замкнутых контурах устройства управления. Как правило, сервоклапаны сложны в изготовлении, имеют высокую стоимость, очень чувствительны к качеству рабочей жидкости. В условиях, где не требуется использовать все возможности сервоклапана, вышеперечисленные факторы могут быть главной проблемой и недостатком при его применении. Создание целого ряда пропорциональных клапанов было прежде всего направлено на то, чтобы сохранить простоту управления электромагнитами и по точности управления приблизиться к сервоклапанам. Пока исполнение пропорциональных клапанов может быть не такое качественное, как у сервоклапанов (по временной характеристике, гистерезису и т.д.), однако оно может быть улучшено во многих случаях их применения. Возможность регулирования пропорциональных клапанов при помощи электроники позволяет значительно проще и быстрее достигнуть разных уровней регулировок, чем при использовании гидравлических устройств. Очень часто можно получить более эффективное управление небольшими и дешевыми электронными компонентами, заменяя гидравлические клапаны управления. Под пропорциональным клапаном будем понимать клапан, который на выходе реализует сигнал пропорциональный входному и который может регулироваться дистанционно-электронными устройствами. Чтобы отличить между собой сервоклапаны и пропорциональные клапаны, необходимо также помнить, что пропорциональные клапаны приводятся в действие при помощи пропорциональных электромагнитов, а сервоклапаны моментными электродвигателями. В зависимости от типа пропорциональных клапанов, на их выходе можно получить или регулируемое давление, расход жидкости или комбинацию регулируемого расхода и направления движения и т.д. Пропорциональные клапаны управления давлением - это или переливной, или редукционный клапаны, в которых величина настройки давления регулируется электронными средствами. Пропорциональные клапаны управления расходом жидкости - это клапаны, в которых расход жидкости может изменяться электронным устройством. Пропорциональный распределитель - это такой распределитель, в котором направление и расход жидкости изменяются при помощи электронного сигнала.
2.3. Пропорциональные электромагниты
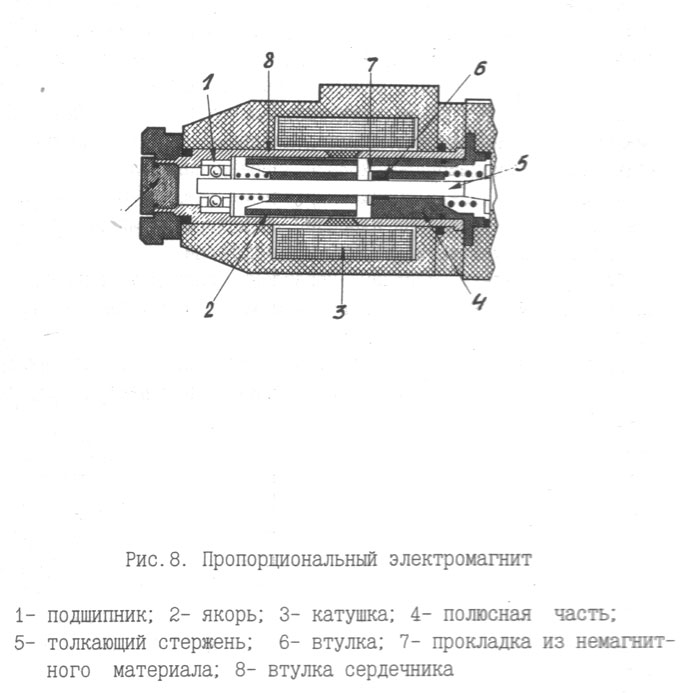
По конструкции пропорциональный электромагнит весьма схож с обычным электромагнитом с мокрым якорем (рис.8).
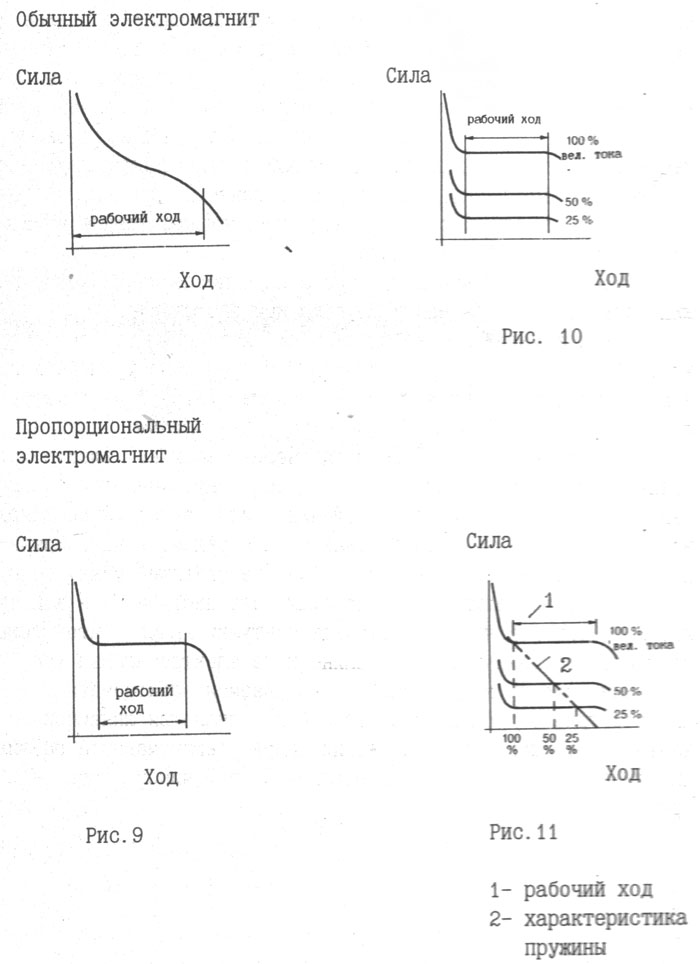
Катушка электромагнита заключена в стеклянную капсулу, заполненную полиэфирным материалом, и плотно прилегает к втулке сердечника. Втулка сердечника изготовлена из слоистой конструкции, материалы которой обладают магнитными и немагнитными свойствами, для того, чтобы сосредоточить магнитное поле в промежутке между полюсной частью и якорем. Полюс магнита плотно прилегает к переднему концу втулки якоря и обеспечивает остановку якоря, когда последний находится в рабочем состоянии. Прокладка из немагнитного материала предохраняет от замыкания якоря и полюса магнита. К тому же она ограничивает максимальную силу, создаваемую электромагнитом и предохраняет якорь от "прилипания" к полюсу, когда выключается питание. Якорь присоединен к длинному толкающему стержню, который перемещается во втулке с низким трением, размещенной в полюсной части. Обратный конец стержня присоединен к шариковому подшипнику, который расположен во втулке сердечника. Данная конструкция обеспечивает минимальное трение и уменьшает гистерезис при работе клапана. Якорь имеет отверстия, через которые легко проходит рабочая жидкость от одного конца к другому при его работе. Пружина малой жесткости толкает якорь вместе со стержнем, который входит в контакт с золотником и позволяет выбрать все зазоры, даже в том случае, если клапан находится в вертикальном положении. Электрический ток, проходя через катушку электромагнита, создает электромагнитную силу, которая выталкивает якорь по направлению к полюсу магнита. Величина силы будет пропорциональна величине тока. Электромагнитная сила передается на золотник клапана через толкающий стержень. Главное различие между пропорциональным электромагнитом и простым (стандартным) - в конструкции якоря, полюсной части и устройства втулки якоря, что позволяет получить постоянную силу по длине хода электромагнита (рис.9). Зависимость между силой, развиваемой электромагнитом, и величиной тока, проходящего через него, является линейной. Это означает, что при любом положении якоря электромагнита развиваемая им сила исключительно определяется величиной тока в катушке (рис.10).
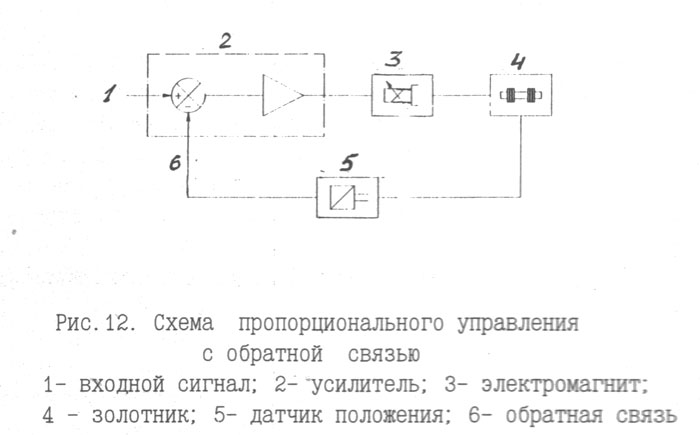
Предполагая, что электромагнит передвигает золотник клапана против усилия пружины и что пружина имеет линейную зависимость между силой и сжатием, мы можем характеристику пружины совместить с вышерассмотренной зависимостью, как показано на рис.11. Из рис. 11 можно заметить, что при данной величине тока электромагнитная сила будет передвигать золотник до тех пор и за такое время, пока она не уравновесится силой пружины, что показывает точка пересечения двух характеристик электромагнита и пружины. Поэтому при изменении величины тока золотник может занять любое положение по ходу перемещения. Рассмотренный принцип работы обычно используется для простейших видов пропорциональных клапанов. На практике, кроме приведенных выше сил, действуют на золотник и другие. Это прежде всего силы давления жидкости и силы трения, которые, безусловно, влияют на положение золотника. Действие силы давления жидкости и, до некоторой степени, силы трения улучшают демпфирование и, следовательно, повышают стабильность. Трение также влияет на гистерезис, который, однако, может быть уменьшен за счет конструктивного исполнения золотника. Силы трения могут быть и более значительными из-за влияния вязкости жидкости, загрязнений и т.д. Где требуется обеспечить более высокие динамические характеристики клапана, возможно использование чувствительного датчика положения, который может быть закреплен на золотнике клапана или электромагните и позволяет определять положение золотника, пропорциональное электрическому сигналу. Заданный сигнал положения обеспечивает обратную связь с усилителем управления клапаном, позволяя золотнику занимать положение согласно схеме с замкнутым контуром (рис.12). Входной сигнал подается на усилитель, который преобразует его в соответствующий выходной сигнал, перемещающий электромагнит. Последний затем оказывает усилие на золотник клапана и передвигает его до тех пор, пока сигнал обратной связи от чувствительного датчика положения соответствует требованию выходного Данный способ позволяет золотнику перемещаться очень точно и любыепомехи, связанные с трением, силами давления жидкости автоматически корректируются. В качестве чувствительного элемента (датчика положения золотника) используется датчик не контактного типа (линейный регулируемый дифференциальный преобразователь).
2.4. Усилители
Большинство усилителей требуют источник питания постоянного тока. В зависимости от применения источники питания могут представлять из себя батареи или источники переменного тока с выпрямителем. Все усилители имеют коэффициент усиления, который определяется отношением величины выходного сигнала к входному. Это может быть применено, например, для регулирования максимальной выходной мощности усилителя (и, следовательно, настройки клапана) при полном входном сигнале.
Компенсация зоны нечувствительности
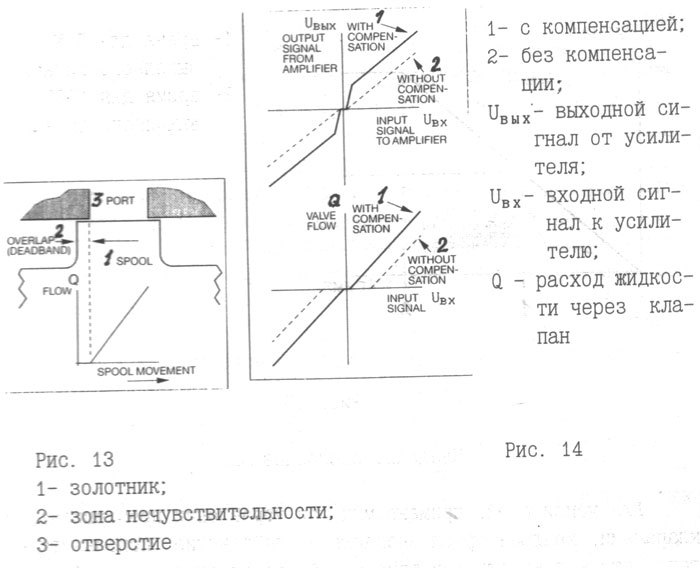
Обычно золотник пропорциональных клапанов имеет определенную зону осевого перекрытия (зону нечувствительности) либо в начале движения золотника (дросселирующий клапан), либо вблизи центральной позиции (для направляющих клапанов). Осевое перекрытие уменьшает утечки рабочей жидкости в исходной (нулевой) позиции и также обеспечивает более высокую степень безопасности, например, при выходе из строя гидронасоса или при внезапной остановке выходного звена гидродвигателя. Однако в пределах этой зоны при перемещении золотника расход жидкости равен нулю, а исполнительный механизм не движется, несмотря на подаваемый сигнал управления (рис. 13).
Если эта характеристика нежелательна, то зону нечувствительности можно устранить (или значительно уменьшать) регулировкой минимального тока на усилителе или увеличением чувствительности усилителя вблизи района нуля (рис.14). Поэтому при максимальной компенсации сигнал на входе очень небольшой величины будет вызывать "скачок" золотника клапана, тем самым значительно уменьшая влияние зоны нечувствительности.
Преобразователь линейной функции
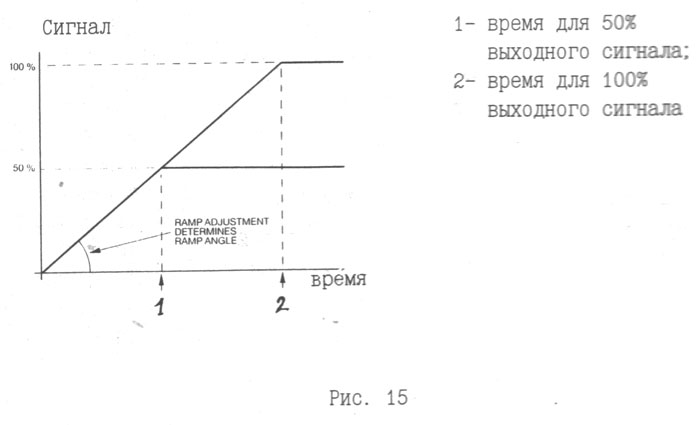
В усилителе, в котором имеется регулируемый преобразователь линейной функции, потенциометр фактически изменяет угол наклона линейной функции сигнала лучше, чем угол наклона линейной функции времени. Например, если преобразователь линейной функции настроен выдавать две секунды для линейного изменения полного выходного сигнала, то время, требуемое для достижения 50%-го выходного сигнала, будет составлять одну секунду (рис.15).
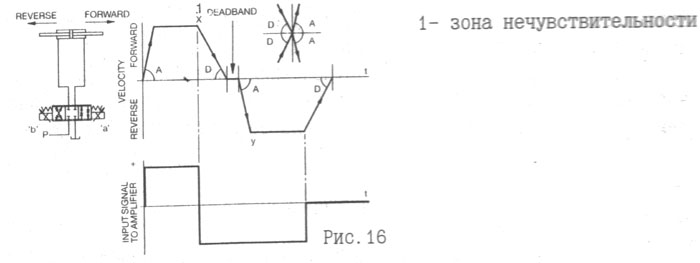
Квадрант распознавания
Для усилителей, применяемых при управлении пропорциональными клапанами, квадрант распознавания - это понятие, используемое для того, чтобы показать действие преобразователя линейных функций. В основном этот термин описывает управление ускорением и замедлением движения выходного звена гидродвигателя в обоих направлениях.
Будем считать, что гидродвигатель управляется пропорциональным распределителем (рис.16). При подаче тока управления на электромагнит "а" поршень цилиндра будет совершать рабочее движение(вправо). Его ускорение может управляться линейной функцией ускорения А. Чтобы изменить движение поршня, последний должен начале замедлиться в темпе, определяемом функцией замедления Д. При прохождении золотником центра и при включении электромагнита «в» поршень ускоряется в обратном направлении в таком же темпе, определяемом линейной функцией ускорения А. Как видно из рис. 16, между двумя точками X и Y золотник клапана перемещается в одном направлении в корпусе золотника, но скорость движения золотника меняется при пересечении им центральной позиции. Это автоматическое изменение известно как квадрант распознавания. В некоторых случаях дополнительные компоненты могут обеспечить усилителю четыре отдельные регулировки линейных функций, т.е. ускорением и замедлением можно управлять независимо для обоих направлений движения.
2.5. Пропорциональные клапаны регулирования давлением
Данные клапаны включают и переливные, и редукционные клапаны, в которых электронные блоки управления могут быть одинаковыми. В некоторых случаях электромодулированный клапан может быть использован в качестве клапана управления как для переливных, так и редукционных клапанов фактически любых размеров. Управляемые переливные клапаны в качестве запорно-регулирующего органа могут иметь: сопло, тарелку, конус. Также встречаются клапаны с обратной связью. Хотя все клапаны выполняют одну и ту же функцию, они управляются разными способами и имеют различные характеристики.
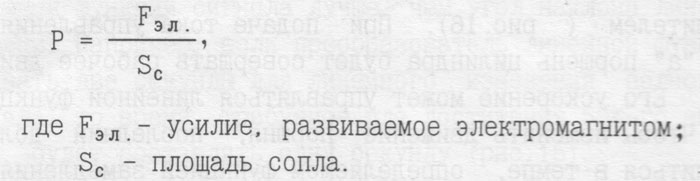
2.5.1. Переливной клапан с элементом типа сопло
Клапан данного типа включает пропорциональный электромагнит (рассмотрен выше), который действует на стержень, расположенный напротив сопла (рис.17). Электромагнит толкает стержень с силой, пропорциональной величине тока, проходящего через обмотку катушки.. Чтобы открыть клапан и создать расход жидкости через него, в полости Р давление должно подниматься до такой его величины, которое преодолеет силу электромагнита и передвинет стержень от сопла влево, т.е.
Давление на входе (Р) клапана поэтому прямо пропорционально величине тока электромагнита. В связи с тем, что усилие, развиваемое электромагнитом, ограничено по величине, диаметр сопла уменьшен до относительно маленького размера (1-2 мм) с целью получения высоких величин давления, на которые может быть настроен клапан. Таким образом, он будет ограничивать максимальный расход жидкости, которая может пройти через клапан, поэтому сам по себе управляемый клапан не может нормально выполнять функцию переливного клапана системы. Скорее он подходит в качестве пилотного клапана для основных переливных или редукционных клапанов.
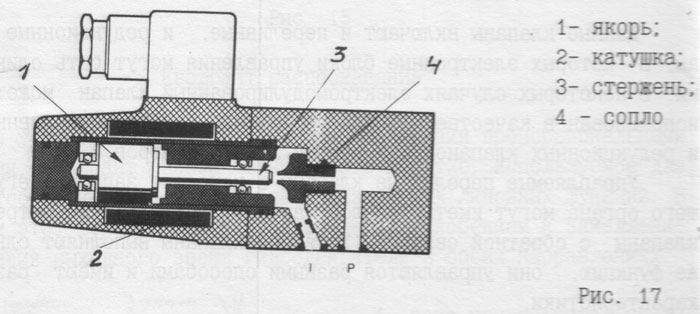
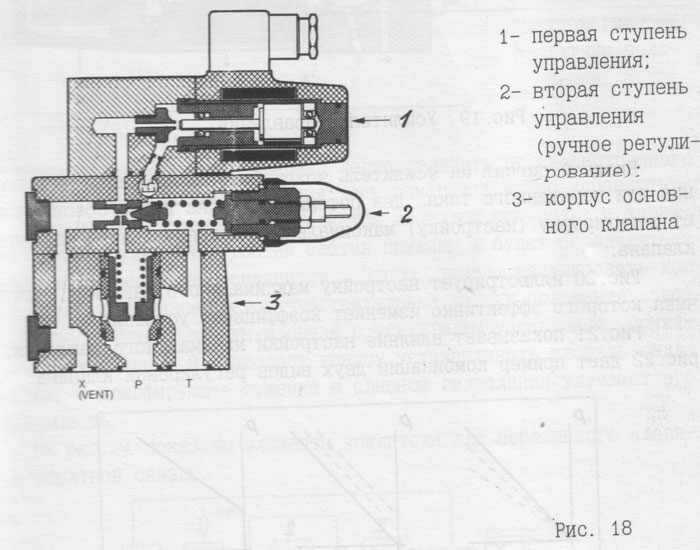
На рис.18 показан переливной клапан с двухступенчатым управлением (непрямого действия), в котором нашел применение вышерассмотренный клапан управления (Vickers). Ступень управления с ручнымрегулированием установлена для настройки предельного максимального давления, а электромодулированный клапан предназначен для регулирования рабочих давлений и управляет работой основного переливного клапана.
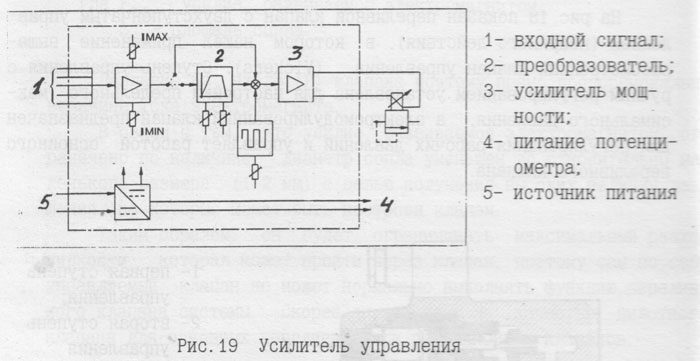
2.5.2 Усилитель управления
Упрощенная схема усилителя для переливного клапана с элементом типа сопло показана на рис. 19.
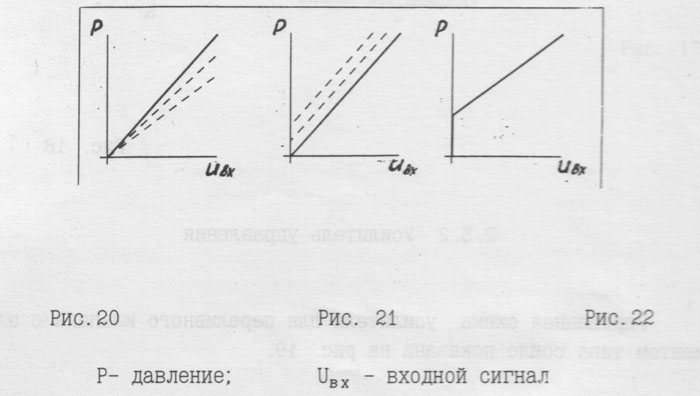
Входной сигнал на усилитель может быть переменного напряжения или переменного тока. Два потенциометра на входе обеспечивают регулировку (настройку) максимального и минимального давления клапана. Рис.20 иллюстрирует настройку максимального давления, величина которого эффективно изменяет коэффициент усиления Рис.21 показывает влияние настройки минимального давления, и рис.22 дает пример комбинации двух видов регулировок клапана.
2.5.3 Переливной клапан с обратной связью
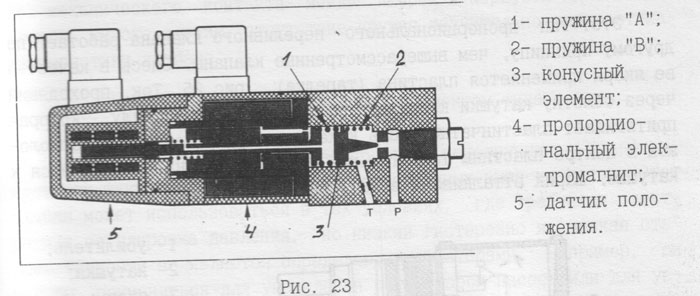
Пропорциональный клапан с конусным запорно-регулирующим элементом показан на рис.23
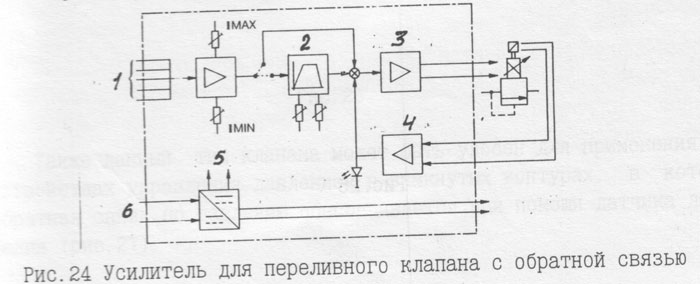
Принцип работы этого клапана легко отличить от рассмотренного выше, т.к. здесь ходом движения электромагнита можно управлять. Регулировка клапана определяется площадью его седла и характеристикой пружины А. Степень сжатия пружины А будет определяться пропорциональным электромагнитом. Чтобы точно регулировать ход электромагнита, применяется чувствительный датчик положения, который обеспечивает обратную связь с усилителем управления. Пружина малой жесткости В позволяет конусу устанавливать площадь седла клапана, а демпфирующее сужение в сливной гидролинии улучшает его стабильность. На рис.24 показаны элементы усилителя для переливного клапана с обратной связью.
1 - входной сигнал; 2 - преобразователь линейной функции; 3 - усилитель мощности; 4 - обратная связь; 5 - внутреннее питание; 6 - источник питания
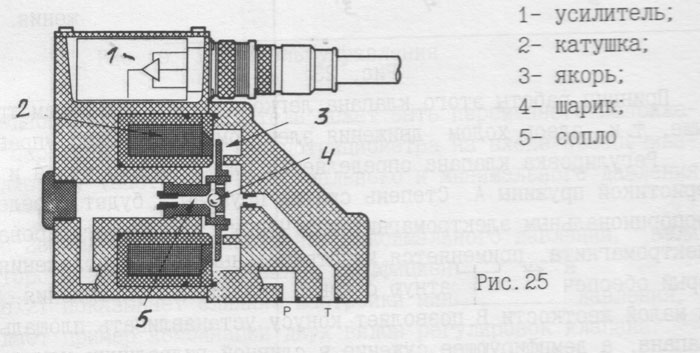
2.5.4 Переливной клапан тарельчатого типа
Этот тип пропорционального переливного клапана работает по другому принципу, чем вышерассмотренные клапаны. Здесь в качестве якоря применяется пластина (тарелка), рис.25. Ток. проходящий через обмотку катушки клапана, создает магнитную силу, которая притягивает пластинчатый якорь к катушке. Стальной шарик расположен в центре пластины так, что как только пластина приближается к катушке, шарик отталкивает ее от сопла клапана.
Как и в рассмотренных выше конструкциях клапанов, ток в катушке будет определять электромагнитную силу и, следовательно, давление, требуемое для перемещения шарика от сопла, и расход жидкости через клапан. Основное достоинство клапана данного типа в том, что здесь нет механического контакта между якорем и корпусом клапана или соплом. Вместе с этим, отсутствие пружин значительно улучшает характеристики клапана.
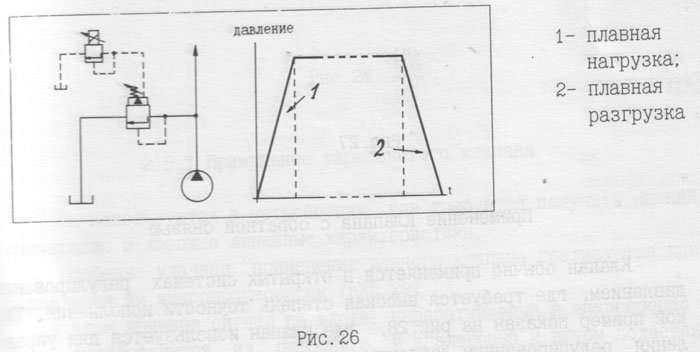
2.5.5 Применение гидроклапана с элементом типа сопло
Данный гидроклапан наиболее прост по конструкции. По стоимости он также выделяется среди рассмотренных выше клапанов. Этот клапан может использоваться в тех условиях, где требуется электронная регулировка давления, но низкий гистерезис и высокая степень точности не являются определяющими факторами. Например, он мог бы применяться для управления регулятором насоса или для условий, где требуются плавная нагрузка и разгрузка в основной ступени переливного клапана (рис.26).
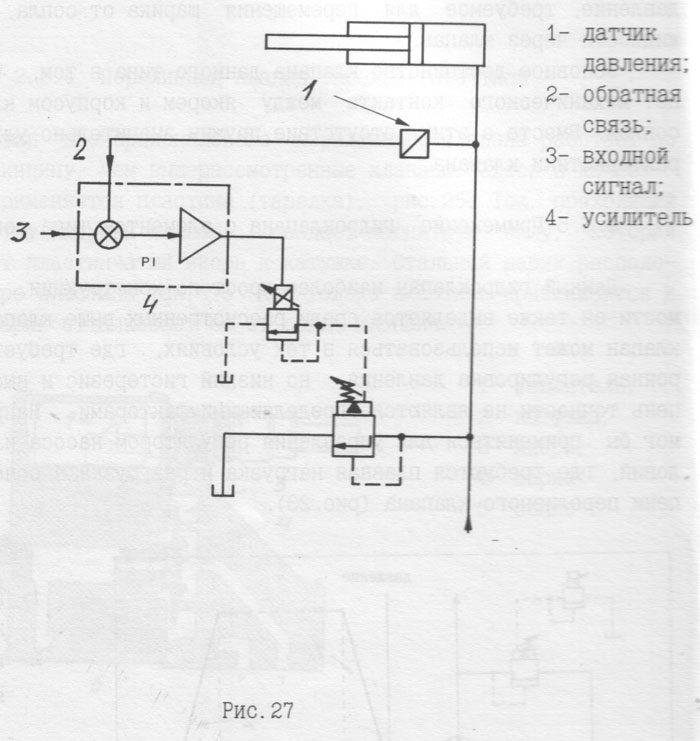
Также данный тип клапана может быть удобен для применения в устройствах управления давлением в замкнутых контурах, в которых обратная связь по давлению обеспечивается при помощи датчика давления (рис.27).
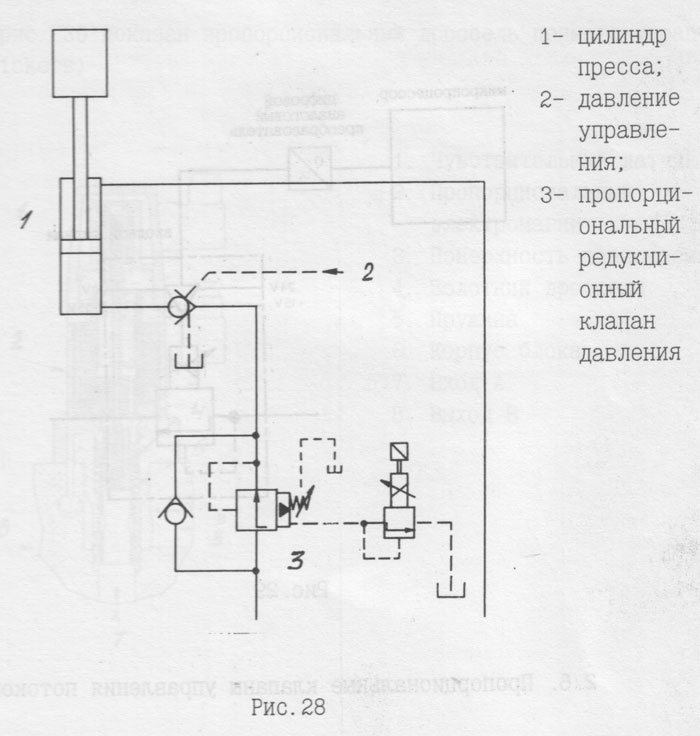
Применение клапана с обратной связью
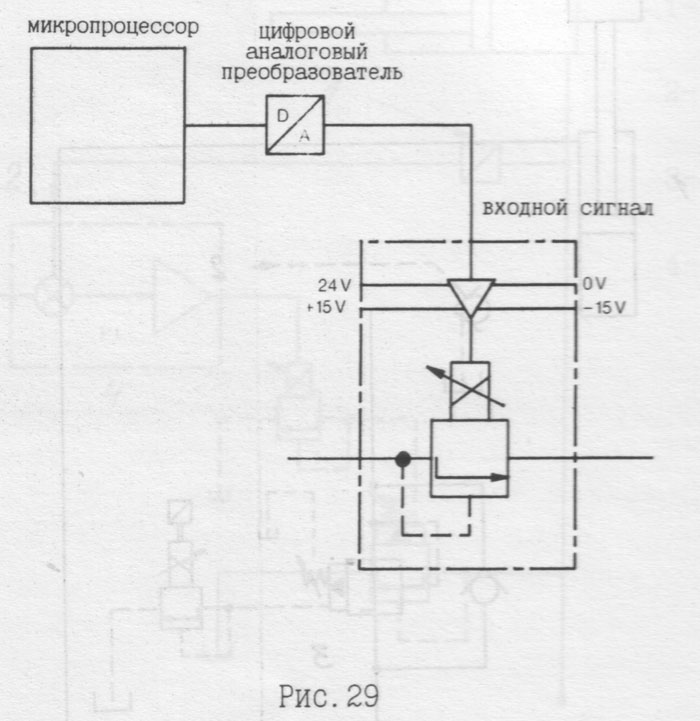
Клапан обычно применяется в открытых системах регулирования давлением, где требуется высокая степень точности исполнения. Такой пример показан на рис.28, где клапан используется для управления редуцированным давлением, которое изменяется при движении вверх цилиндра пресса.
Он используется в устройствах, где требуется получить низкий гистерезис и хорошие линейные характеристики. Особенно удачное применение данного клапана реализуется при управлении им микропроцессором (рис.29). В этом примере сигнал на входе, вырабатываемый в микропроцессоре, преобразуется из цифрового в аналоговый и потом подается непосредственно к клапану, т.е. в этом случае не требуется промежуточный усилитель.
2.6. Пропорциональные клапаны управления потоком 2.7. Эти клапаны обеспечивают электронное управление скоростью гидродвигателей, их ускорением и замедлением. Клапаны управления потоком (расходом) жидкости с простым электронным управлением использовались на протяжении многих лет. В основном они состояли из стандартного клапана, регулируемого при помощи электродвигателя. Главными недостатками, присущими им, были: размеры, стойкость, неудовлетворительные временные характеристики. Вот почему в настоящее время более широкое применение нашли клапаны с пропорциональными электромагнитами. Используются несколько типов пропорциональных клапанов для управления расходом жидкости: - прямого и непрямого действия; - с обратной связью и без обратной связи.
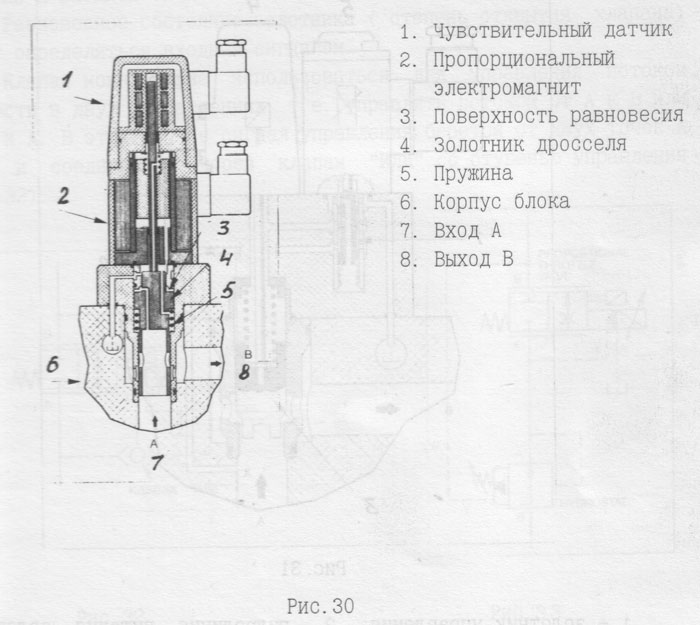
2.6.1. Дроссель прямого управления
На рис. 30 показан пропорциональный дроссель прямого управления (Vickers)
В данной конструкции распределительный блок выполняет роль корпуса клапана. Пропорциональный электромагнит устанавливает золотник клапана во втулке. Золотник может открывать и перекрывать путь движения жидкости. Золотник гидравлически уравновешен благодаря канатам, просверленным в его корпусе. Пружина смещает золотник в закрытую позицию и для того, чтобы открыть клапан, электромагнит должен только преодолеть усилие пружины и силу гидравлического давления, действующую на золотник. Расход жидкости через клапан будет определяться и величиной открытия (входной сигнал) и перепадом давления между отверстиями.
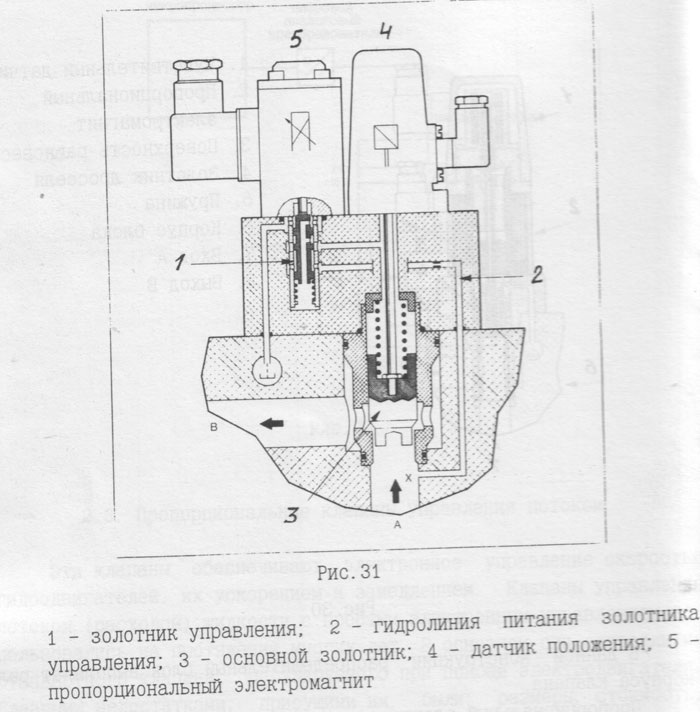
2.6.2, Дроссель с пилотным (непрямым) управлением
Дроссель с непрямым (пилотным) управлением используется в гидросистемах с большим расходом рабочей жидкости (рис.31).
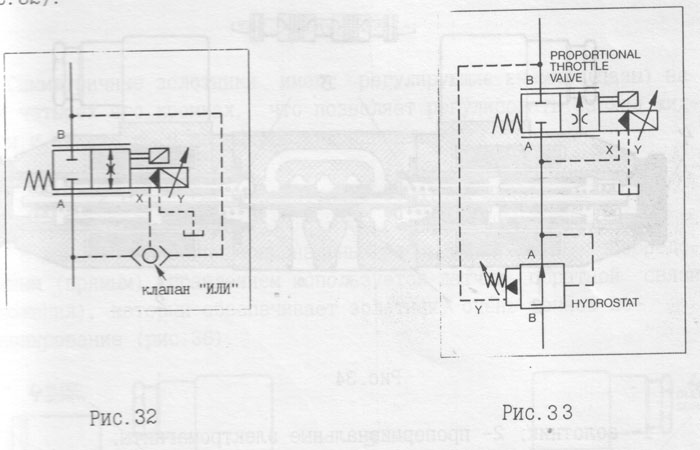
В этом случае пропорциональный электромагнит действует непосредственно на золотник управления, который и управляет положением основного золотника. При нулевом сигнале на электромагните пружина толкает золотник управления в верхнее положение, при этом давление с двух сторон (внизу и вверху) на основном золотнике устанавливается одинаковым. Пружина основного золотника в этом случае: прижимает его к седлу клапана - клапан закрыт. Как только в электромагнит подается сигнал, золотник управления двигаете вниз. При этом частично открывается сливное отверстие, часть жидкости поступает в гидробак - давление на верхней стороне основного золотника уменьшается. Благодаря разности давлений на золотнике последний поднимается вверх, открывая при этом основной проход для рабочей жидкости через клапан. Основной золотник продолжает подниматься до тех пор, пока сигнал обратной связи от датчика положения и входной сигнал не совпадут. Равновесное состояние золотника (степень открытия клапана) будет определяться входным сигналом. Клапан может также использоваться для управления потоком жидкости в двух направлениях, т.е. управлять потоком от А к В или от В к А. в этом случае сигнал управления берется от двух точек А и В и соединяется через клапан "ИЛИ" со ступенью управления (рис.32).
2.6.3. Компенсация давления
Во всех вышерассмотренных случаях для данного входного сигнала расход жидкости через клапан будет сильно зависеть от разности давления на нем. Чтобы получить компенсацию давления (т.е. сделать расход жидкости независимым от нагрузки или давления системы), необходимо использовать некоторые формы компенсаторов давления в сочетании с дросселирующим клапаном. Рис.33 иллюстрирует один из методов компенсации давления. Стандартный редукционный клапан соединяется последовательно с дросселем. Редукционный клапан устанавливает постоянную разность давлений через дроссель и, следовательно, постоянный расход жидкос~;1 для данного входного сигнала.
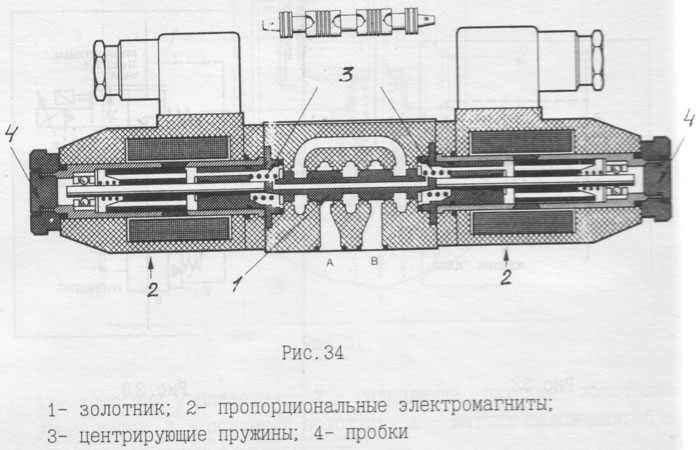
2.6.4. Пропорциональные распределители без обратной связи
Направление потока рабочей жидкости через распределитель (рис.34) будет зависеть от порядка включения электромагнитов, а расход жидкости через него будет определяться величиной входного сигнала.
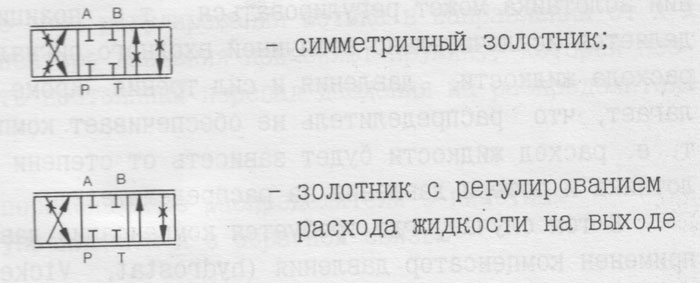
В зависимости от выполняемых функций золотники могут отличаться друг от друга по конструкции. Среди многочисленных видов золотников, например, можно выделить два, имеющих разные регулировочные характеристики (рис.35): - симметричный золотник, в котором имеются одинаковые сужения сечений в обоих направлениях потока жидкости (1); - золотник с регулированием расхода жидкости на выходе (2).
Симметричные золотники имеют регулирующие выемки (пазы) на всех четырех его кромках, что позволяет регулировать расход жидкости и на входе, и на выходе гидродвигателя.
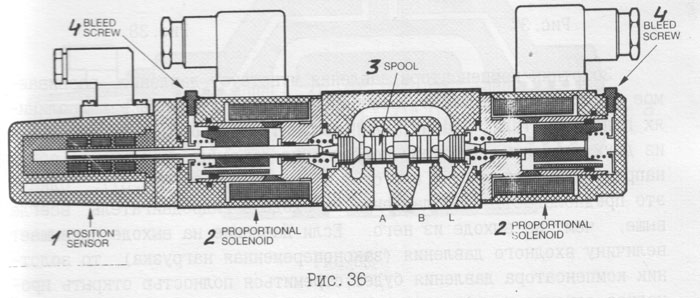
2.6.5. Распределители с обратной связью
В данном типе пропорциональных распределителей с непосредственным (прямым) управлением используется датчик обратной связи (положения), который обеспечивает золотнику очень точное позиционирование (рис.36).
1 - датчик положения; 2 - пропорциональный электромагнит; 3- золотник; 4- пробки
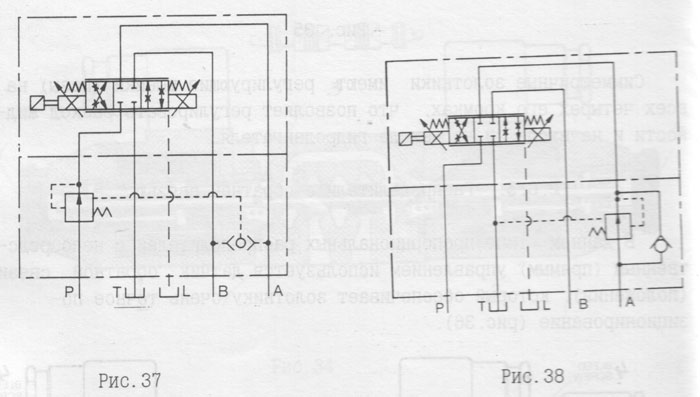
Использование датчика положения означает, что ход перемещения золотника может регулироваться, т.е. позиция золотника определяется исключительно величиной входного сигнала и не зависит от расхода жидкости, давления и сил трения. Кроме того, это предполагает, что распределитель не обеспечивает компенсацию давления, т. е. расход жидкости будет зависеть от степени открытия окон золотника и потери давления на распределителе. В том случае, где требуется компенсация давления, может быть применен компенсатор давления (hydrostat, Vickers), подключены к распределителю последовательно (рис.37).
Золотник компенсатора давления чувствует давление, развиваемое насосом (Р), а также через клапан "ИЛИ" давление в гидролиниях гидродвигателя. Клапан "ИЛИ" автоматически отбирает наибольшее из двух давлений, поэтому компенсация давления возможна в обоих направлениях потока, т.е. от Р к А и от Р к В (рис.37). Однако это предполагает, что давление на входе в гидродвигатель всегда выше, чем на выходе из него. Если давление на выходе превышает величину входного давления (законопеременная нагрузка), то золотник компенсатора давления будет стремиться полностью открыть проходное сечение и компенсации давления не будет. Поэтому в гидросистемах может использоваться второй способ подключения компенсатора давления (рис.38), что позволяет компенсировать давление при регулировании потока в направлении от А к Т. Обычно в компенсаторе давления применяют пружину, которая позволяет поддерживать постоянный перепад давления на распределителе 6-8 бар.
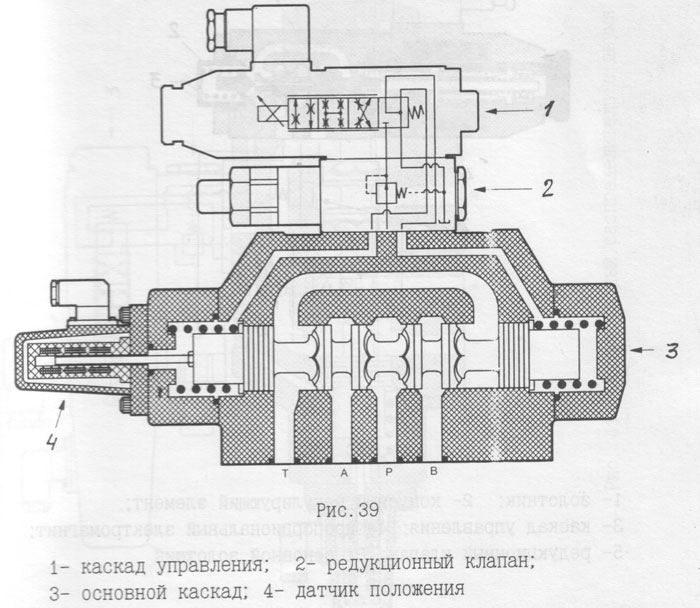
2.7. Пропорциональные распределители с пилотным управлением и с обратной связью
Для управления более высокими расходами жидкости используются двухкаскадные распределители (рис.30). Распределитель имеет основной золотник, центрированный пружинами, и каскад управления с электромагнитом. К основному золотнику подключается датчик положения. Регулирующие выемки, выполненные на кромках основного золотника, позволяют пропорционально управлять потоком рабочей жидкости.
Редукционный клапан расположен между пилотным (управляющим) основным каскадами распределителя. Каскад (ступень) управления состоит из одиночного электромагнита, соединенного со специальным золотником и конусообразным регулирующим элементом (рис.40). При нормальной работе электромагнит перемещает золотник вправо к конусному регулирующему элементу, блокируя при этом канал, просверленный в корпусе золотника. Основной золотник будет достигать своего центрального положения при 50%-й величине сигнала на электромагните. Уменьшая или увеличивая величину сигнала, можно передвигать золотник вправо или влево. Основной золотник будет смещаться до такого положения, пока сигнал обратной связи не совпадет с входным сигналом, т.е. положение основного золотника будет пропорционально з
|
||||
|
|
Последнее изменение этой страницы: 2021-03-10; просмотров: 527; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.209.100 (0.012 с.) |