Тема 5.4. Электродвигательные исполнительные
Устройства.
Исполнительными электродвигателями называют управляемые двигатели малой мощности, которые предназначены для преобразования электрического сигнала в механическое вращение вала.
Как правило, исполнительные двигатели имеют две обмотки: возбуждения и управления.
Обмотки возбуждения постоянно находятся под напряжением, а на обмотку управления сигнал подается лишь тогда, когда необходимо получить вращение вала.
Так как исполнительные двигатели работают в схемах управления, то для них в основном характерны пуски, остановки или реверсы. В настоящее время в качестве исполнительных двигателей используют двухфазные асинхронные, трёхфазные асинхронные, синхронные шаговые двигатели и двигатели постоянного тока.
Исполнительные устройства с двигателями
Постоянного тока.
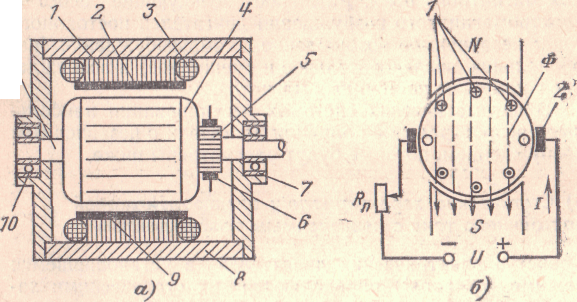
Принцип работы электродвигателя состоит в следующем (рис.80б). К обмотке якоря через щетки 2 и коллектор (на рисунке не показан) подводится напряжение постоянного тока U, под воздействием которого в секциях обмотки 1 протекает электрический ток I. В результате взаимодействия электрического тока с магнитным потоком Ф, создаваемым электромагнитными полюсами N и S статора, возникает вращающий момент:
М=КМ× I ×Ф, где Км - постоянный конструктивный коэффициент электродвигателя.
В автоматических системах регулирования наибольшее распространение получили двигатели с независимым возбуждением.
Возможны три основных способа регулирования частоты вращения:
1 - изменением сопротивления цепи якоря путем введения добавочного сопротивления Rд;
2 - изменением магнитного потока возбуждения Ф;
3 - изменением напряжения U, подводимого к якорю электродвигателя. n=U/(ke×Ф)
4
Схема регулирования частоты вращения электродвигателя первым способом приведена на рис. 81а. Регулирование частоты вращения электродвигателя с помощью изменения сопротивления R д возможно только в сторону ее понижения от основной.
| Рис. 80. Электродвигатель постоянного тока.
а – конструкция:
1- 1 - железо полюса. 2 и 9 – полюса. 3 – обмотка возбуждения.
4- якорь. 5 - коллектор. 6 - щётки. 7 и 10 – подшипники,
8-cтанина, 11- вал якоря;
б - принцип действия электродвигателя.
|  | Рис. 81. Регулирование скорости электродвигателя.
а - схема; б - механические характеристики.
.
| 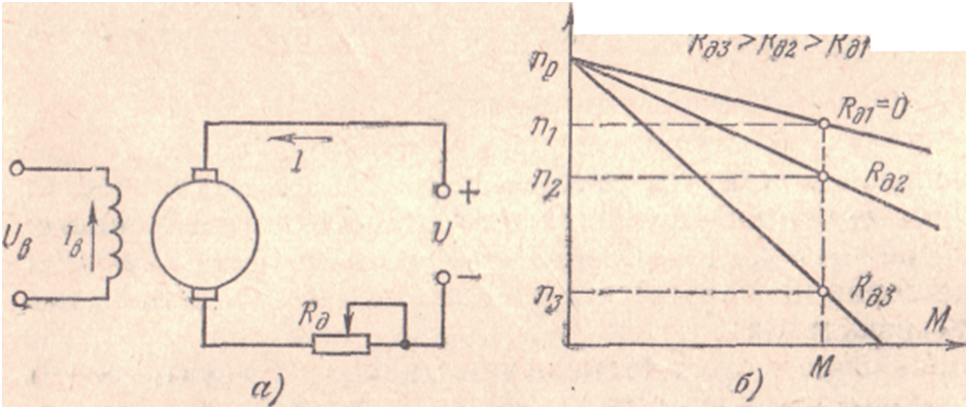
Механической характеристикой электродвигателя рис.81б называется зависимость его частоты вращения от развиваемого на валу момента вращения: n = f (М).
Уравнение механической характеристики: 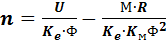
где U – подведённое к электродвигателю напряжение,
Ф – магнитный поток полюсов,
R – сопротивление обмотки якоря,
Ке и Км – коэффициенты, для данного типа двигателя постоянные величины.
Способ регулирования частоты вращения изменением магнитного потока возбуждения Ф используется в следящих системах мощностью от нескольких ватт до нескольких десятков ватт, где управление может быть осуществлено от электронного, полупроводникового или магнитного усилителя.
Регулирование частоты вращения двигателя изменением подводимого к якорю напряжения позволяет иметь не только широкую, экономичную и плавную регулировку частоты вращения, но и безреостатный пуск двигателя. Указанный способ наиболее часто применяют на практике.
|






