Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Характеристики переходного процесса регулирования.
Процесс на рис.5 рассмотрен при изменении задания от I зад1 до I зад2. При изменении задания возникает отклонение dI, которое регулятор должен свести до ноля. В идеальном случае процесс регулирования завершается, когда I изм сравняется с I зад без колебаний. Процесс, за время Трег, в течении которого измеряемая величина Iизм сравняется с заданной I зад называется переходным или временем разгона. Время разгона является мерой инерционности объекта. Инерционность объекта зависит от его массы. Время регулирования Трег определяет быстродействие системы и равно промежутку времени, в течении которого с начала переходного процесса выполняется неравенство │ I зад – I изм│≤ β, где β – погрешность работы регулятора. После переходного процесса наступает установившийся процесс I уст, когда I изм сравняется с заданным I зад.
При рассмотрении процессов в системе регулирования важное значение имеют три понятия: устойчивость системы, качество регулирования, и точность регулирования. Устойчивость - это свойство системы возвращаться в установившееся состояние после того, как она была выведена из этого состояния каким либо возмущением. Качество регулирования зависит от того, насколько этот процесс близок к желаемому. Показателем качества регулирования является число колебаний N рег регулируемой величины в течении времени переходного процесса Трег.
Точность регулирования. Точность регулирования зависит от погрешностей системы регулирования. Часто на практике установившийся процесс из-за погрешностей β при отработке отклонения dI протекает с колебаниями I изм около оси I зад, как указано на рис 5. Погрешность β возникает по разным причинам, из-за: - статической погрешности регулирования; - динамической погрешности регулирования; - погрешности измерений датчика; - неточности изготовления регулятора, исполнительного механизма (люфтов в шарнирах рычагов и механики, неточная масса грузиков, плохо отрегулированная пружина и т.п.). Статическая погрешность. Статические регуляторы поддерживают нестрого постоянное значение регулируемой величины, а с ошибкой, которая называется статической ошибкой.
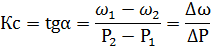
При изменении нагрузки Р скорость вращения вала ω, поддерживаемая регулятором, изменится на величину d ω, которую называют статической ошибкой или статической погрешностью. Степень изменения регулируемой величины характеризуется коэффициентом статизма, который определяет наклон характеристики
При статической характеристике, увеличение нагрузки на величину ∆Р приводит к уменьшению скорости вращения турбины на величину ∆ω (рис 6а). Характеристика с коэффициентом статизма Кс равным нулю называется астатической. Регуляторы с астатической характеристикой обеспечивают постоянство регулируемой величины. Но эта характеристика не позволяет распределить в заданном соотношении величину регулирующего воздействия между параллельно работающими объектами. Для этой цели используются регуляторы с со статическими характеристиками.
На рис 6б показаны статические характеристики 1 и 3 для двух регуляторов скорости вращения турбин с разными коэффициентами статизма:
На графике на рис 6б показаны статические характеристики регуляторов скорости вращения турбин с разными углами наклона α. Из рис 6б следует, например, что при увеличении скорости вращения турбин нагрузится больше та турбина, характеристика которой имеет меньший угол наклона α1< α2. Т.е. у первой турбины нагрузка увеличится от Р1 до Р2, а у второй турбины только от Р3 до Р4.
Динамическая погрешность. Динамическая погрешность обусловлена реакцией средства измерения на скорость изменения входного сигнала. Эта погрешность зависит от инерционности средства измерения входного сигнала, изменений нагрузки и влияющих величин. На выходной сигнал средства измерений влияют значения входного сигнала и любые изменения его во времени.
Например, изменение нагрузки на турбину требует изменение напора воды (количества топлива) для его работы. Однако подвижные грузики 2 центробежного регулятора и масса турбины обладают определенной инерцией. По этой причине всякое изменение скорости вращения вала сопровождается рассогласованием между изменением количества подаваемого топлива и скоростью вращения вала двигателя. При этом наблюдаются колебания (I изм) - переходной процесс, см. рис 5. Динамической характеристикой системы автоматического регулирования называется зависимость изменения регулируемой величины от времени в процессе регулирования при возникновении возмущающего воздействия. Характеристики системы регулирования (рис.7). Виды переходных процессов.
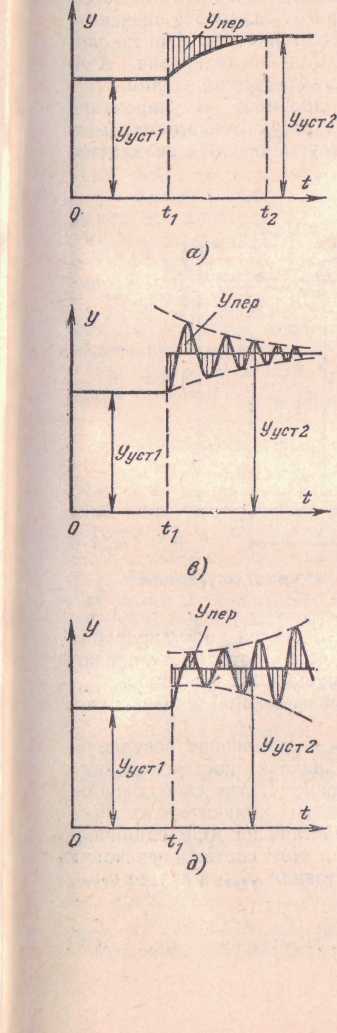
В общем случае значение регулируемого параметра в неустановившемся режиме в каждый момент времени Y = Y уст+ Y пер, где Y уст – установившееся значение регулируемого параметра, Y пер – переходная составляющая изменения регулируемого параметра, изменяющаяся по времени в течении переходного процесса. При переходе системы из одного установившегося режима в другой она может оказаться либо устойчивой, либо неустойчивой. Чтобы определить это, необходимо произвести исследование динамики процесса регулирования, т. е. определить закон измерения регулируемого параметра в функции времени при воздействии на АСР возмущающих факторов. Если Y пер стремится к нулю хотя бы за неограниченно большой отрезок времени, то АСР будет устойчивой. Если с течением времени Y пер не стремится к нулю, то АСР будет неустойчивой. Примеры переходных процессов см. на рис. 7. Контрольные вопросы к зачёту по разделу «Основные понятия об элементах и системах автоматики». 1. Что такое автоматика? 2. Что такое телемеханика? 3. Назначение датчиков?
4. Какие параметры можно усиливать усилителем? 5. Назначение преобразователя? 6. Что такое исполнительные элементы? 9. Назначение микроЭВМ. 12. Какую функцию выполняет система АСК? 13. Какую функцию выполняет система АСУ? 14. Какую функцию выполняет система АСР? 15. Какова задача регулятора скорости вращения гидротурбины? 16. Какую роль играет пружина и грузики, рычаг АВС, игла форсунки? 16. Пользуясь рисунком регулятора скорости вращения гидротурбины, ответьте на вопросы. На генераторе увеличилась нагрузка. Что произойдёт со скоростью вращения турбины. Как себя поведут элементы регулятора: муфта с грузиками, рычаг АВС, игла форсунки. 17. Пользуясь рисунком регулятора скорости вращения гидротурбины, ответьте на вопросы. На генераторе уменьшилась нагрузка. Что произойдёт со скоростью вращения турбины. Как поведут себя элементы регулятора: муфта с грузиками, рычаг АВС, игла форсунки. 18.Пользуясь рисунком регулятора скорости вращения гидротурбины, ответьте на вопросы. В муфте по ошибке поставили пружину мощнее. Объясните, почему и как изменится скорость вращения гидротурбины. 19.Пользуясь рисунком регулятора скорости вращения гидротурбины, ответьте на вопросы. В муфте увеличили вес грузиков, объясните, почему и как изменится скорость вращения гидротурбины.
Раздел 3. Датчики.
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-11-28; просмотров: 352; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.181.21 (0.011 с.) |