
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Электрические тахогенераторы постоянного тока.
Предназначены для получения напряжения, пропорционального частоте вращения, и применяются в качестве электрических датчиков угловой скорости. В зависимости от вида выходного напряжения и конструкции они делятся на тахогенераторы постоянного и переменного тока. Тахогенераторы постоянного тока конструктивно представляют собой электрогенераторы постоянного тока и выполняются с возбуждением от постоянных магнитов или электромагнитов. На рис.50а приведена схема тахогенератора постоянного тока с возбуждением от постоянных магнитов. При вращении якоря тахогенератора с частотой n с его щеток снимается ЭДС, значение которой определяется по формуле: Е=Ке×Ф× n где Ке - коэффициент, зависящий от конструкции и схемы якоря; Ф — магнитный поток, n - частота вращения,
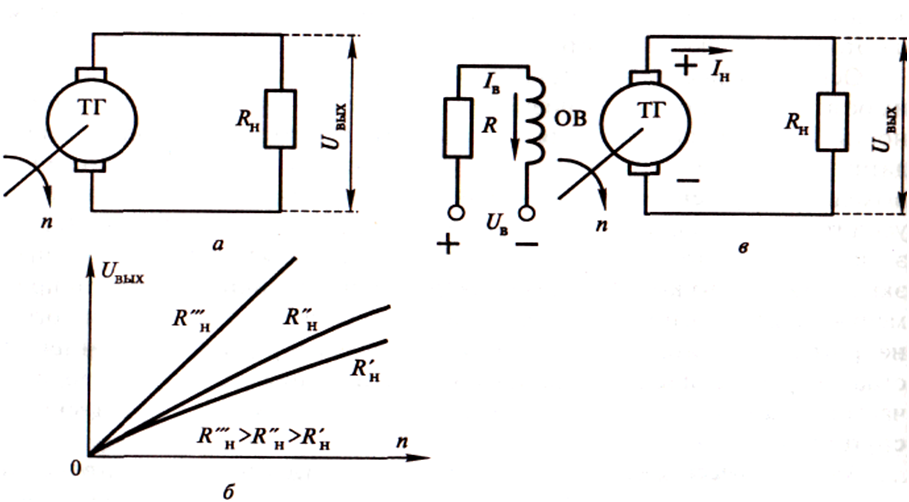 Для данного типа тахогенератора магнитный поток Ф является величиной постоянной, так как он создается постоянными магнитами. Поэтому ЭДС зависит только от частоты вращения якоря тахогенератора. Для данного типа тахогенератора магнитный поток Ф является величиной постоянной, так как он создается постоянными магнитами. Поэтому ЭДС зависит только от частоты вращения якоря тахогенератора.
Измерительный прибор имеет сопротивление Rн, чем больше это сопротивление, тем точнее показания прибора. Выходные характеристики рассмотренного тахогенератора для различных значений нагрузок приведены на рис.50б. Из этого рисунка следует, что с увеличением частоты вращения тахогенератора до определенного момента его выходное напряжение U ВЫХ растет пропорционально и только при большой частоте линейность характеристики нарушается, причём чем больше сопротивление нагрузки R Н, тем больше крутизна характеристики и тем больше ее линейность. В автоматике применяют также тахогенераторы постоянного тока с независимым электромагнитным возбуждением. В таких тахогенераторах магнитный поток возбуждения ФВ создается специальной обмоткой возбуждения ОВ (рис.50в), которая располагается на полюсах статора. Для тахогенераторов с независимым электромагнитным возбуждением ЭДС можно найти следующим образом Е=Ке×Ф× n, где I в – ток обмотки возбуждения, ω - число витков обмотки возбуждения,
R м – магнитное сопротивление магнитной цепи тахогенератора. Из последнего выражения следует, что ЭДС тахогенератора зависит не только от частоты вращения якоря, но и от магнитного потока обмотки возбуждения Фв, т. е. тока в обмотке возбуждения I В. При изменении направления вращения якоря меняется полярность выходного сигнала. Приведенные выше формулы для определения ЭДС тахогенератора справедливы только при работе его на холостом ходу. При работе тахогенератора с нагрузкой R Н его выходное напряжение, снимаемое со щеток якоря, равно: U вых=Е– I н× R а, где I Н - ток нагрузки; R а - сопротивление цепи якоря, которое состоит из сопротивления самой якорной обмотки и сопротивления переходного контакта между коллектором и щетками. Выходная характеристика тахогенератора с независимым электромагнитным возбуждением напоминает выходную характеристику тахогенератора постоянного тока с возбуждением от постоянных магнитов (рис.50б ). При частоте вращения якоря тахогенератора, близкой к нулю, возникает так называемая зона нечувствительности, в пределах которой выходное напряжение равно нулю. Конструкции тахогенераторов с возбуждением от постоянных магнитов проще, чем конструкции тахогенераторов с независимым возбуждением. Асинхронный тахогенератор. Можно разделить на два вида: синхронные и асинхронные. Основными преимуществами тахогенераторов переменного тока по сравнению с тахогенераторами постоянного тока являются: отсутствие коллектора и щеток; синусоидальная форма выходной ЭДС; большая надежность; стабильность характеристик. Асинхронный тахогенератор широко применяется в автоматике и вычислительной технике. Конструкция его напоминает конструкцию двухфазного асинхронного двигателя с тонкостенным ротором (рис.51а). На статоре 1 располагаются продольная и поперечная обмотки, сдвинутые относительно друг друга на 90°.
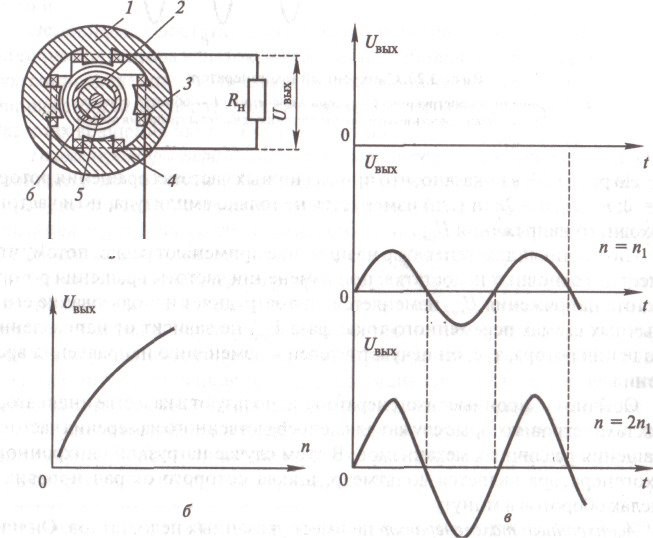 Одна из обмоток является обмоткой возбуждения 3, а другая - выходной (сигнальной) обмоткой 4. Ротор тахогенератора 2 укреплен на валу 6. Он представляет собой тонкостенный алюминиевый стакан, вращающийся в зазоре между статором 1 и неподвижным цилиндрическим сердечником 5. Одна из обмоток является обмоткой возбуждения 3, а другая - выходной (сигнальной) обмоткой 4. Ротор тахогенератора 2 укреплен на валу 6. Он представляет собой тонкостенный алюминиевый стакан, вращающийся в зазоре между статором 1 и неподвижным цилиндрическим сердечником 5.
К обмотке возбуждения 3 подводится переменное напряжение Uв с постоянными амплитудой и частотой, а к выходной обмотке подключается нагрузка R Н, с которой снимается выходное напряжение U ВЫХ. При подаче на обмотку возбуждения напряжения переменного тока в тахогенераторе возникает пульсирующий магнитный поток возбуждения, который пересекает ротор в направлении, перпендикулярном оси выходной обмотки. Если ротор не вращается, то в выходной обмотке не наводится ЭДС переменного тока, так как оси обмоток З и 4 в этом случае взаимно перпендикулярны. При вращении ротора в нем, кроме ЭДС трансформации, наводимой пульсирующим магнитным потоком, возникает также ЭДС вращения за счет пересечения ротором магнитных линий потока возбуждения, т. е. в роторе наводится суммарная ЭДС. Эта ЭДС создает в роторе токи, вызывающие появление переменного магнитного потока, совпадающего с осью выходной обмотки и наводящего в ней ЭДС, значение которой пропорционально частоте вращения ротора n. Следует отметить, что фаза наводимой ЭДС зависит от направления вращения ротора. Наводимая в выходной обмотке асинхронного тахогенератора ЭДС определяется по формуле: U ВЫХ =к× U в× n, где к – коэффициент пропорциональности, U в – напряжение обмотки возбуждения. На рис.51б, показана статическая характеристика асинхронного тахогенератора U вых =ƒ(n), которая нелинейна. Нелинейность характеристики обусловлена реакцией цепи выходной обмотки и возрастает с повышением частоты вращения ротора. Основными достоинствами асинхронного являются: независимость частоты выходного напряжения от частоты вращения ротора n (рис.51в) и чувствительность тахогенератора к изменению направления вращения ротора. Главным недостатком асинхронного тахогенератора является изменение выходной ЭДС при изменении температуры. В основном это вызвано тем, что при работе тахогенератора происходит нагрев ротора, в результате чего изменяется его сопротивление, которое во много раз больше сопротивления обмоток статора. Для уменьшения температурной погрешности асинхронных тахогенераторов большой точности их роторы часто выполняют из материалов с весьма малым температурным коэффициентом, например, из марганцовистого алюминия, марганцовистой меди или фосфористой бронзы. Импульсные тахогенераторы.
Для измерения угловой скорости вращения ω широко применяют импульсные тахогенераторы (рис.52). импульсный тахогенератор состоит из вращающегося зубчатого ротора и неподвижного постоянного магнита с обмоткой. При вращении ротора к полюсам магнита подходят то два выступа, то две впадины. Это приводит к изменению магнитного потока в сердечнике и появлению в обмотке ЭДС, частота f которой пропорциональна скорости вращения колеса f = n / t, где n -число импульсов за время t. К обмотке подключается цифровой прибор, показывающий число импульсов в сек.
Импульсный тахогенератор нашёл широкое применение в автоматических системах управления на базе микропроцессоров. 3.10.4. Магнитоиндукционные тахометры (рис.53). Имеют цилиндрический или дисковый токопроводящий элемент. При вращении магнита с угловой скоростью ω в этом элементе наводится ЭДС, вызывающая появление тока в его теле. В результате взаимодействия тока с магнитным полем магнита возникает крутящий момент, стремящийся повернуть цилиндр в направлении вращения магнита. Этому препятствует пружина, в связи с чем стрелка поворачивается на угол, пропорциональный угловой скорости ω.
Сельсины (синхронный вал). Для измерения угла рассогласования механически не связанных валов, например при дистанционном управлении объектами, могут использоваться специальные электрические машины - сельсины. Сельсин имеет две обмотки: однофазную и трёхфазную. Трёхфазная обмотка состоит из соединённых в звезду трёх однофазных обмоток, магнитные оси которых сдвинуты на 1200С относительно друг друга. Одна обмотка расположена на статоре, другая - однофазная на роторе. Сельсинная связь состоит из двух сельсинов: сельсина-датчика СД и сельсина-приёмника СП (рис.54).
Но вследствие трения при вращении ротора сельсин-приёмника его ротор немного запаздывает, что вызывает небольшую погрешность. Этот режим работы сельсинной связи используется для дистанционного управления работой объекта или дистанционной передаче угла поворота механизма.
|
||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-11-28; просмотров: 351; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.186.92 (0.01 с.) |
 ,
, 


