Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Создание параметрической модели манипулятора измерительной системы arm средствами
T - FLEX PARAMETRIC CAD 15 При разработке пространственных (трехмерных) сборочных моделей (3D сборок) проектировщиком выбирается схема организации каждой подсборки и сборки. Под сборочной трехмерной моделью понимается такая модель T-FLEX CAD, в составе которой участвует геометрия других 3D моделей, хранящихся в отдельных файлах [1]. При этом модели, хранящиеся в отдельных файлах и участвующие в сборке (подсборке), называют фрагментами. Компонентом сборки (фрагментом) может служить 3D модель, созданная в автоматизированной системе T-FLEX CAD (далее T-FLEX CAD), либо модель другой системы, переданная в T-FLEX CAD в одном из поддерживаемых обменных форматов (например, файлы Parasolid расширением «*.x_t»). Среди компонентов сборки (фрагментов) можно выделить детали (фрагменты, не содержащие другие фрагменты) и подсборки (фрагменты, включающие другие фрагменты). В зависимости от способа создания компонентов сборки можно выделить два основных подхода к созданию сборочной модели: «снизу вверх» и «сверху вниз». В первом случае сначала формируются фрагменты, а затем из них – сборка. Если же сначала формируется сборка целиком, а затем ее компоненты сохраняются в отдельные файлы, которые используются для разных целей (оформление чертежей, рисунков; контроль вычислений и построений и др.), то метод создания сборки называют «сверху вниз». Рассмотрим создание параметрической модели манипулятора измерительной системы ARM (SIGMA ARM MANUAL) в среде Т-FLEX по методу «снизу вверх». Для ускорения процесса воспользуемся предварительно созданными файлами-фрагментами со всеми необходимыми для сборки изделия деталями «Основание (1).grb», «Шарнир 1 (2).grs», «Колено 1 (3).grs», «Ось 1 (4)2.grs», «Ось 2 (6)2.grs», «Шарнир 2 (7).grs», «Измеритель (8).grs» и «Оси.grs». Создание переменных
Для создания переменных после запуска программы «T-FLEX PARAMETRIC CAD 3D 15» на ее стандартной инструментальной панели нажимаем кнопку «Создать новую 3D сборку»
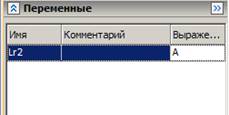
Рисунок 1 – Вызов редактора списка переменной В открывшемся окне редактора введите на отдельных строках следующие значения «2018, 2022, 2025, 2028, 2030, 2036, 2046, 2052» и нажмите кнопку «ОК» сначала в окне текстового редактора, а потом в диалоге создания переменной.В редакторе переменных в поле «Выражение» выберите любое значение из выпадающего списка. Далее создайте переменную А ив поле «выражения» введите значение «model==2018?416.5:(model==2022?600:(model==2025?675:(model==2028?750:(model==2030?800:(model==2036?950:(model==2046?1200:1350))))))» и нажмите «ОК». Аналогичным образом создайте переменную B с выражением «model==2018?405.5:(model==2022?420:(model==2025?495:(model==2028?570:(model==2030?620:(model==2036?770:(model==2046?1020:1170))))))». Таким образом, каждому выражению переменной model соответствует свое значение переменных А и В. Обратите внимание на синтаксис команды выбора. Он характерен для большинства Си-подобных языков и в базовом представлении выглядит так: Проверяемое условие? выражение если условие выполняется: выражение если условие не выполняется. При необходимости использования сложных условий используются скобки. Теперь желательно сохранить сборку (в той же папке что и файлы деталей) под любым оригинальным именем, после чего можно перейти непосредственно к вставке фрагментов в текущий файл сборки. При работе с фрагментами следует четко усвоить такие понятия как: Система координат (локальная система координат или ЛСК) – вспомогательный 3D элемент построения, позволяющий осуществлять привязку 3D объектов в пространстве; Исходная система координат – система координат на вставляемом в сборку теле Целевая система координат – система координат в сборке, с которой совмещается исходная система координат для ориентации модели в пространстве сборки; Внешняя переменная – переменная фрагмента, видимая и доступная для редактирования при вставке этого фрагмента в сборку ФРАГМЕНТ 1: «ОСНОВАНИЕ» файл «Основание (1).grb» Для добавления фрагмента нужно выполнить команду «Создать 3D фрагмент», для чего достаточно нажать кнопку
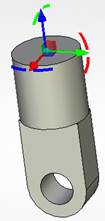
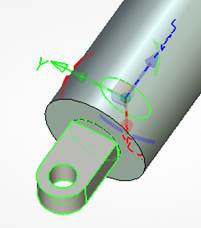
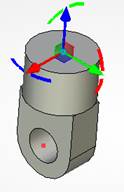
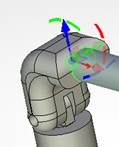
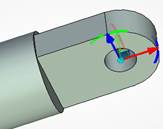
Рисунок 2 - Трехмерная модель «Основание», правильная ориентация при вставке
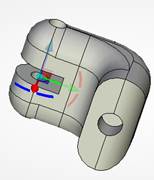
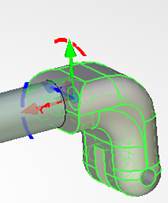
ФРАГМЕНТ 2: «ШАРНИР 1» файл «Шарнир 1 (2).grs» При необходимости повторно вызываем команду «Создать 3D фрагмент», либо (если команда вставки фрагмента активна) просто выбираем через кнопку Таблица 1 -Добавление фрагмента «Шарнир 1 (2).grs»
Перемещение сопряженных элементов выполняется с помощью одноименной команды (кнопка
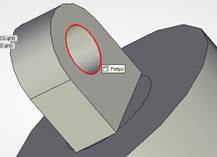
ФРАГМЕНТ 3: «КОЛЕНО 1» файл «Колено 1 (3).grs» Исходная система координат создается на основе ребра (центра кривой/ребра), которое совпадает с линией внутренней кромки сквозного отверстия (таблица 2), а целевая – также на основе ребра (центра кривой/ребра), которое совпадает с линией, соответствующей кромки сквозного отверстия фрагмента 2. В окне свойств в пункте Таблица 2 -Добавление фрагмента «Колено 1 (3).grs»
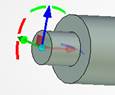
ФРАГМЕНТ 4: «ОСЬ 1» файл «Ось 1 (4)2.grs» Исходная система координат создается на основе ребра (центра кривой/ребра), которое совпадает с линией кромки торца одного из концов детали (таблица 3), а целевая – также на основе ребра (центра кривой/ребра), которое совпадает с линией, очерчивающей границы дна глухого отверстия фрагмента 3. Таблица 3 - Добавление фрагмента «Ось 1 (4)2.grs»
Этот фрагмент выполнен параметрическим, и при вставке на вкладке переменные необходимо задать значение переменной. Lr2, определяющей его размер (длину). Это значение можно задать как числом, так и с помощью других переменных. При вставке этого фрагмента следует параметрически задать его длину, используя созданную ранее переменную A (см. раздел «Создание переменных»). Для этого в режиме выполнения команды «Создать 3D фрагмент» в разделе «Переменные фрагмента» окна свойств вместо цифрового значения переменной Lr2 добавляемого фрагмента вводится имя переменной А,содержащейся в файле-сборке. Для вставки одной из имеющихся в файле сборки переменных можно использовать клавишу F 8.
ФРАГМЕНТ 5: «КОЛЕНО 2» файл «Колено 1 (3).grs» Следующим добавляемым фрагментом является уже знакомое Вам колено. Исходная система координат создается на основе ребра (центра кривой/ребра), которое совпадает с линией внутренней кромки глухого отверстия (таблица 2), а целевая – также на основе ребра (центра кривой/ребра), которое совпадает с линией, соответствующей торцу фрагмента 4 (таблица 4). В окне свойств в пункте
Таблица 4 - Добавление фрагмента «Колено 1 (3).grs»
ФРАГМЕНТ 6: «ОСЬ 2» файл «Ось 2 (6)2.grs» Исходная система координат создается на основе ребра (центра кривой/ребра), которое совпадает с линией кромки одного из торцев сквозного отверстия детали (таблица 5), а целевая – на основе ребра (центра кривой/ребра), которое совпадает с линией, соответствующей кромки сквозного отверстия предыдущего фрагмента.
Таблица 5 - Добавление фрагмента «Ось 2 (6)2.grs»
Для этой оси в разделе переменные фрагмента следует указать имя переменной В. В окне свойств в пункте
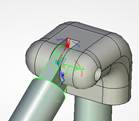
ФРАГМЕНТ 7: «ШАРНИР 2» файл «Шарнир 2 (7).grs» Исходная система координат создается на основе ребра (центра кривой/ребра) – центра окружности, совпадающей с ребром, лежащем в плоскости верхнего основания цилиндрической части детали (таблица 6). Целевая система координат – также на основе ребра (центра кривой/ребра), которое совпадает с линией кромки глухого отверстия фрагмента 6. В окне свойств в пункте
Таблица 6 - Добавление фрагмента «Шарнир 2 (7).grs»
ФРАГМЕНТ 8: «ИЗМЕРИТЕЛЬ» файл «Измеритель (8).grs» Исходная система координат создается на основе ребра (центра кривой/ребра), которое совпадает с линией внутренней кромки сквозного отверстия, а целевая – также на основе ребра (центра кривой/ребра), которое совпадает с линией, соответствующей кромки сквозного отверстия фрагмента 7 (таблица 7).
Таблица 7 - Добавление фрагмента «Измеритель (8).grs»
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-11-23; просмотров: 70; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.226.180.68 (0.022 с.) |
 (также можно выбрать в меню «Файл» пункт «Новая 3D сборка» или на странице приветствия ярлык
(также можно выбрать в меню «Файл» пункт «Новая 3D сборка» или на странице приветствия ярлык  ). Перед Вами открывается рабочее пространство с тремя рабочими плоскостями. Зайдите в редактор переменных (кнопка
). Перед Вами открывается рабочее пространство с тремя рабочими плоскостями. Зайдите в редактор переменных (кнопка  или клавиша «V») и создайте внешнюю переменную model (кнопка
или клавиша «V») и создайте внешнюю переменную model (кнопка  ) и выберите из выпадающего списка «Текст» в группе «Список» (Рисунок 1)
) и выберите из выпадающего списка «Текст» в группе «Список» (Рисунок 1)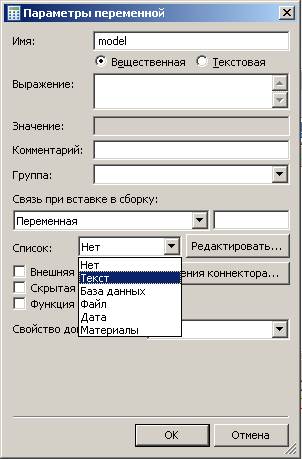
 на стандартной инструментальной панели, активизирующую диалог вставки внешней модели. Кнопка
на стандартной инструментальной панели, активизирующую диалог вставки внешней модели. Кнопка  в автоменю позволяет выбрать файл с фрагментом для вставки. Нажмите ее и в открывшемся окне найдите и дважды щелкните мышкой на первом вставляемом файле «Основание (1).grb». Деталь «Основание» появляется в рабочем поле документа. В данном случае специально выбирать исходную и конечную системы координат не нужно, достаточно с помощью команд автоменю
в автоменю позволяет выбрать файл с фрагментом для вставки. Нажмите ее и в открывшемся окне найдите и дважды щелкните мышкой на первом вставляемом файле «Основание (1).grb». Деталь «Основание» появляется в рабочем поле документа. В данном случае специально выбирать исходную и конечную системы координат не нужно, достаточно с помощью команд автоменю  (повернуть вокруг оси Х),
(повернуть вокруг оси Х),  (повернуть вокруг оси Y),
(повернуть вокруг оси Y),  (повернуть вокруг оси Z), разверните деталь таким образом, чтобы ее ось вращения была направлена вдоль оси Z чертежа. Согласитесь со сделанными изменениями, нажав
(повернуть вокруг оси Z), разверните деталь таким образом, чтобы ее ось вращения была направлена вдоль оси Z чертежа. Согласитесь со сделанными изменениями, нажав  в автоменю или окне свойств элемента (Рисунок 2). Желательно сохранять результат своей работы после каждого изменения параметрической модели, например, после добавления в нее нового фрагмента.
в автоменю или окне свойств элемента (Рисунок 2). Желательно сохранять результат своей работы после каждого изменения параметрической модели, например, после добавления в нее нового фрагмента.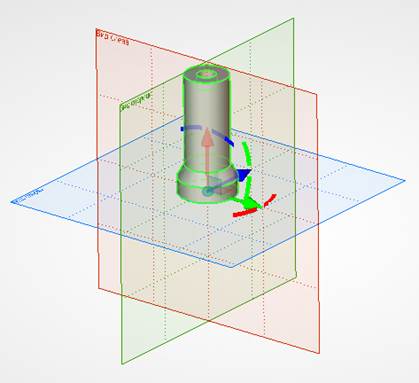
 «Выбрать или создать исходную систему координат» и в открывшейся модели выбираем ребро - окружность, определяющее положение начала исходной системы координат - центр этой окружности, лежащей в плоскости нижнего (внешнего) основания цилиндрической части детали (таблица 1). В результате к центру указанной окружности (ребра) привязывается локальная система координат (ЛСК) таким образом, что ось Z совпадает с осью вращения цилиндрической части детали. Подтверждаем выбор ЛСК нажатием кнопки
«Выбрать или создать исходную систему координат» и в открывшейся модели выбираем ребро - окружность, определяющее положение начала исходной системы координат - центр этой окружности, лежащей в плоскости нижнего (внешнего) основания цилиндрической части детали (таблица 1). В результате к центру указанной окружности (ребра) привязывается локальная система координат (ЛСК) таким образом, что ось Z совпадает с осью вращения цилиндрической части детали. Подтверждаем выбор ЛСК нажатием кнопки  ,
,  ,
,  разрешите поворот вокруг оси Z
разрешите поворот вокруг оси Z  и подтвердите сделанные изменения нажатием
и подтвердите сделанные изменения нажатием 


 на стандартной инструментальной панели). После вызова этой команды мышью выбирается предварительно заданное подвижным звено механизма (его модели) и с помощью перетаскивания мышью выполняется перемещение сопряженных элементов. При завершении работы с этой командой можно сохранить результат этого перемещения (механизм останется в заданном с помощью этой команды положении) – нажав кнопку
на стандартной инструментальной панели). После вызова этой команды мышью выбирается предварительно заданное подвижным звено механизма (его модели) и с помощью перетаскивания мышью выполняется перемещение сопряженных элементов. При завершении работы с этой командой можно сохранить результат этого перемещения (механизм останется в заданном с помощью этой команды положении) – нажав кнопку  автоменю). Часто, особенно при проверке вновь созданного сопряжения (разрешенных степеней свободы), бывает достаточным лишь подтверждение в виде наличия возможности разрешенных (требуемых) движений, поэтому результат перемещения не сохраняется. Для того чтобы, весь механизм не перемещался, нужно зафиксировать положение фрагмента (файл «Основание (1).grb»), выделив сам фрагмент в окне «3D модель» и с помощью контекстного меню (нажать правую клавишу мыши) выбрав команду
автоменю). Часто, особенно при проверке вновь созданного сопряжения (разрешенных степеней свободы), бывает достаточным лишь подтверждение в виде наличия возможности разрешенных (требуемых) движений, поэтому результат перемещения не сохраняется. Для того чтобы, весь механизм не перемещался, нужно зафиксировать положение фрагмента (файл «Основание (1).grb»), выделив сам фрагмент в окне «3D модель» и с помощью контекстного меню (нажать правую клавишу мыши) выбрав команду  .
.


 разрешите поворот вокруг оси Х.
разрешите поворот вокруг оси Х.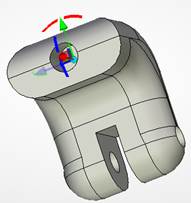



 разрешите поворот вокруг оси Y.
разрешите поворот вокруг оси Y. разрешите поворот вокруг оси Z.
разрешите поворот вокруг оси Z.